鹿强 , 吴琳, 陈昭
, 吴琳, 陈昭
LU Qiang, WU Lin, CHEN Zhao
通讯作者:
收稿日期: 2017-12-30
修回日期: 2018-03-26
网络出版日期: 2018-05-20
版权声明: 2018 《地球信息科学学报》编辑部 《地球信息科学学报》编辑部 所有
基金资助:
作者简介:
作者简介:鹿 强(1989-),男,硕士生,主要从事数据关联研究。E-mail: luqiang@ict.ac.cn
展开
摘要
船舶自动识别系统、船舶远程识别与跟踪系统、卫星导航定位系统、导航雷达、星载雷达等海上目标监控系统互相补充,极大地增加了海上移动目标监控的广度和质量。然而,同一个移动目标在不同系统中具有不同的标识和轨迹,需要进行有效的数据融合,关联多源轨迹数据,建立各系统中移动目标的对应关系,才能形成统一的海上态势,为移动目标跟踪、轨迹数据挖掘等提供支持。本文介绍和总结了海上目标多源轨迹的常见数据源;剖析与比较了可用于移动轨迹数据关联的最近邻、概率数据关联、联合概率数据关联和多假设跟踪4种量测/航迹关联方法,和基于统计方法或模糊数学的2类航迹/航迹关联方法,以及相关工作进展;总结了常见的算法评估方式;最后讨论了现有方法适用场景问题,及其进一步的研究方向。
关键词:
Abstract
With the globalization of the Belt and Road national strategy, the volume of shipping trade is increasing rapidly. As a result, the problem of the safety of maritime navigation and monitoring has become increasingly prominent. The real-time monitoring of large-scale ships, based on the spatio-temporal data, through target tracking and information fusion is an effective method, but it also faces great challenges. Data association, as the basis and a key step of target tracking and information fusion, has important application value in military and civil fields. This paper summarizes the problems related to data association. Firstly, the data sources for trajectories of the marine targets were introduced and compared, showing its necessity and feasibility. Then two kinds of problems in data association, i.e., measurement-to-track association (MTTA) and track-to-track association (TTTA), were described. Based on the data association methods in MTTA, we abstracted a data association model consisting of state estimation and association judgment, and described the Kalman filter used generally in state estimation. After that, the basic principles and improvements of nearest neighbor (NN), probabilistic data association (PDA), joint probabilistic data association (JPDA) and multiple hypothesis tracking (MHT) were introduced. NN implements the data association using the distance between the measured and predicted values. PDA, considering only a single target, calculates the association probability of each measurement in the circumstance with presence of clutter and target missing, and associates the measurement with the maximum association probability to the target. JPDA as the extension of PDA, suitable for multiple targets, calculates the joint association probability of measurements and targets by joining all targets, and selects the association event corresponding to the maximum joint association probability as the association result. MHT is a multi-scan multi-hypothesis method and has the characteristics of track creation, maintenance, deletion and false alarm. It achieves the optimum in theory by maintaining multiple possible hypotheses generated by each association cycle. The key to the MHT is how to control the scale of the hypotheses by effective pruning in order to improve the efficiency of time and space of the algorithm. With regard to TTTA, two kinds of methods, based on statistics and fuzzy mathematics, were introduced respectively. The statistics methods consist of NN/K-NN/MK-NN, double threshold track correlation, sequential track correlation, etc. The key of fuzzy methods is the construction of fuzzy factor set and membership function. We also introduced the evaluation methods for data association. Finally, the problems in the existing methods, e.g., the application scenarios, and further researches were explained.
Keywords:
伴随着“一带一路”国家战略的全球化推进,航运贸易量不断增加,由此带来的海上航行安全和监控问题日益突出。包括船舶自动识别系统(Automatic Identification System, AIS)[1]、北斗和雷达[2]等在内的多种监控手段将在海上交通管理中发挥重要作用。AIS作为船舶间通过自组织的方式进行航行状态实时交互的一种新型通信手段,能够同时提供船舶的位置、航速等动态信息以及船舶类型、船名和国别等静态信息,广泛应用于船舶交通管理系统中。内河航道和近海海域主要通过岸基AIS进行通信,其优点是状态信息更新频率快,但通信距离相对较短;远洋区域主要通过星载AIS进行通信,但通过星载AIS收到的船舶数据相对较少。北斗系统作为中国自主研制的全球导航卫星系统(Global Navigation Satellite System, GNSS),目前已经实现亚太地区较高精度的定位和授时服务,并将于2018年起为“一带一路”沿线和周边国家提供服务,至2020年完成组网提供全球服务。北斗具有通信距离远,覆盖范围广等优点,基于北斗的导航设备已经开始大量应用于船舶导航。雷达作为一种主动方式的传统目标探测手段,能够探测目标的距离和方位信息,尽管无法提供类似船名和国别的属性信息,但其具有AIS和北斗等基于自报位方式的通信手段所不具有的优势,能够在AIS或北斗设备关闭的情况下发现目标,因而对于发现危险目标,保障海上航行安全具有重要意义。通过对AIS、北斗和雷达等类型轨迹数据进行关联,可以发挥各自优势,提高目标监测的覆盖范围和质量。本文介绍和总结了海上目标多源轨迹的常见数据源;剖析与比较了可用于移动轨迹数据关联的最近邻、概率数据关联、联合概率数据关联和多假设跟踪4种量测/航迹关联方法和基于统计方法或模糊数学的2类航迹/航迹关联方法,以及相关工作进展;总结了常见的算法评估方式;最后讨论了现有方法适用场景问题,及其进一步的研究方向。
不同类型传感器产生的数据类型各不相同。海上目标的多源轨迹数据主要来自于雷达[2]、AIS[1]、北斗、Argos[3]、LRIT[4,5,6]等各类传感器。如表1所示,这些传感器由于工作方式的不同,在信息种类、定位精度、覆盖区域和更新频率等方面有所差异。
表1 传感器类型对比表
Tab. 1 Comparison of sensors
| 传感器类型 | 数据信息 | 定位精度 | 覆盖区域 | 更新频率 |
|---|---|---|---|---|
| 雷达 | 目标编号、距离、方位、速度、目标大小等 | 1 m | 近海 | 秒级 |
| AIS | 经纬度、航速、航向等动态信息,及MMSI、船舶名称、船舶类型、船舶大小、船舶国籍等静态信息 | 取决于所用GNSS设备(10~100 m) | 全球 | 静态信息6 min,动态信息2 s-3 min |
| 北斗 | 经纬度、航速、航向、终端号 | 10~100 m | 亚太 | 15 min-1 h |
| Argos | 经纬度、终端号 | 250~500 m | 全球 | 小时级 |
| LRIT | 经纬度、MMSI、IMO、船舶名称 | 取决于所用GNSS设备(10~100 m) | 全球 | 6 h |
相同类型传感器检测目标的覆盖范围和数据质量各不相同。图1是分别基于两路卫星AIS数据的全球船舶分布,图1(a)覆盖范围更广,图1(b)覆盖密度更高,二者具有一定的互补性。表2记录了不同来源的AIS数据在一个月内的接收情况,各个来源的数据质量存在一定的差异。基于以上分析,通过对多源同构或异构数据进行关联和融合,可以得到更加全面、准确和可靠的船舶信息。
根据文献[7]对数据融合的介绍,数据关联问题可以分为量测/航迹关联(Measurement To Track Association, MTTA)和航迹/航迹关联(Track To Track Association, TTTA)2种,如图2所示。MTTA是指将接收到的量测和已有的目标航迹进行关联形成该传感器的局部航迹,多用于传感器层级。TTTA是指将来自不同来源的多种局部航迹进行关联形成全局航迹,多用于融合中心层级。
当目标的探测信号较弱时,为了能够探测到目标,必须降低探测门限,同时信号较弱的背景信号和传感器噪声也会被混入探测信号中,从而产生杂波或虚假量测。当目标彼此间的距离较近时,也会无法准确判定量测和目标的关联关系,从而产生MTTA问题[8]。
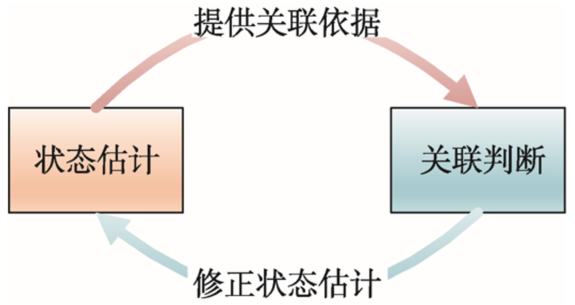
在MTTA中,各种数据关联方法均可归结为 图3中的2个步骤:状态估计和关联判断。状态估计是基于目标的历史状态(位置、航速等)预测未来某一时刻的状态。关联判断基于目标量测值和状态估计值根据一定的关联准则进行关联。不同的数据关联方法使用的状态估计方法基本相同,主要有卡尔曼滤波(Kalman Filer, KF)[9,10],及其改进版本的扩展卡尔滤波(Extend Kalman Filer, EKF)[10,11]和无损卡尔曼滤波(Unscented Kalman Filer,UKF)[12]。
当存在多源传感器数据时,为了能得到观测目标的全面、准确和可靠的状态信息,需要对多源数据进行融合,而融合的关键步骤是进行航迹/航迹关联。由于不同传感器的测量误差、目标检测概率和检测区域并不相同,导致来自不同传感器的同一目标的航迹点不能精确匹配,由此产生TTTA问题。
在MTTA中,数据关联方法主要用于解决,在存在杂波、漏检和多目标的情况下,如何将传感器产生的量测正确关联至已知或新的目标,从而形成每个目标的航迹。最近邻、概率数据关联、联合概率数据关联和多假设跟踪是4种经典的数据关联方法,在实际中使用较多。
最近邻(Nearest Neighbor, NN)数据关联是比较简单常用的一种方法,主要适用于噪声极少、目标数量较少的场景。该方法中不同的航迹是相互独立更新的,量测和航迹的关联判断主要包括2个步骤:
(1)计算有效区域,选择落在航迹当前预测状态的有效区域内的量测作为航迹关联的候选量测;
(2)更新状态估计,从候选量测中选择与当前预测状态距离最近的量测用于更新航迹的状态;
最近邻关联方法的关键是对度量距离的定义,常用是马氏距离,其定义如式(1)所示。
式中:k表示当前时刻;
文献[13]使用一种称为模糊相关权重(Fuzzy Correlation Weight)的似然测度代替传统NN中的马氏距离。该文献中所提的方法性能优于基于马氏距离的NN和传统的基于模糊逻辑的NN,性能接近JPDA,但计算复杂度小于JPDA。
NN数据关联方法的优点是运算量小且易于实现,缺点是不适用于高虚警、低检测率的密集场景。
概率数据关联(Probabilistic Data Association,PDA)是Bar-Shalom等[8,14]提出的一种适用于存在噪声和一定漏检率的单目标场景下的MTTA方法。PDA中存在以下假设:
(1)仅有一个目标用于关联,其运动方程和测量方程采用KF;
(2)航迹在关联之前已经被初始化;
(3)目标的过去信息被近似表示为一个服从高斯后验概率的充分统计量,公式为:
式中:
(4)落在目标状态预测值的有效区域内的量测作为目标的候选量测集合;
(5)至多有一个有效区域内的量测被判定为目标的量测,其他的量测被看作虚警或杂波,且服从满足均匀分布的独立同分布,虚警或杂波的数目服从泊松分布;
(6)目标是否被检测到具有一定的概率,且每次检测之间相互独立。
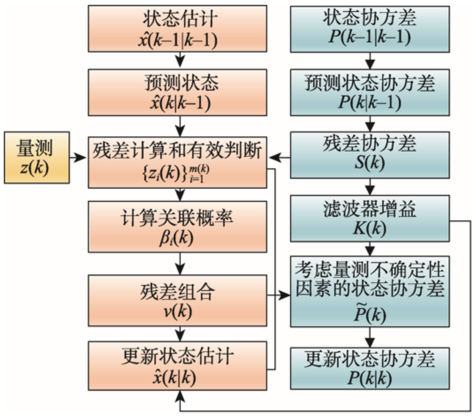
PDA的算法框架如图4所示,包括预测、量测有效性判定、数据关联和状态估计4个步骤。
基于文献[15]的混合归约方法,文献[8]中提出一种MXPDA(Mixture PDA)方法,使用单个高斯模型近似估计PDA中的混合高斯模型,从而降低多杂波环境下关联计算的复杂度。为提高对机动目标的关联准确率,文献[16]基于IMM(Interacting Multiple Model)算法[17]和PDA算法提出一种IMM-PDA方法,通过引入多个运动模型来解决单一运动模型预测准确度不高的问题。针对IMM算法需要事先指定一些子模型这一限制,文献[18]将模糊逻辑引入PDA中提出了IMM-FPDA方法,IMM-FPDA使用一组模糊规则自动控制PDA中滤波器过程噪声的协方差。文献[19]将模糊聚类应用于PDA中,用模糊C-均值聚类(FCM)算法代替PDA原有的不同量测的概率加权方法,提出了适用于单目标跟踪的混合模糊概率数据关联HF-PDA。
PDA方法存在的问题是只适用于单目标,不支持新航迹的创建。
联合概率数据关联(Joint Probabilistic Data Association,JPDA)是Bar-Shalom等[8,20]对PDA方法的扩展,适用于存在噪声和一定漏检率的多目标场景下的数据关联。JPDA方法基于以下假设条件:
(1)目标数目是已知的;
(2)一个目标的量测可以落在相邻目标的有效区域内,并且该种情况可以发生多次;
(3)系统的历史信息可以被归结为由一些状态估计组成的近似充分统计量,这些状态估计由每个目标的状态的条件均值及协方差表示;
(4)目标状态服从高斯分布,其均值和方差为条件(3)中充分统计量的均值和方差;
(5)每个目标均有一个运动模型和测量模型,不同目标的模型可以不同。
JPDA算法步骤如下:
(1)联合所有的目标计算量测和目标的关联 概率;
(2)在充分统计量可用的假设下,根据最新的量测集合计算关联概率;
(3)根据各个目标的状态估计是否独立,可以将JPDA分为普通JPDA和考虑耦合的JPDAC。
JPDA与PDA的主要区别是需要计算当前关联周期内的以下联合关联事件的条件概率:
式中:
JPDA方法可分为参数化和非参数化。在参数化JPDA中,虚假量测的数目服从泊松分布,在非参数化JPDA中,虚假量测的数目为常量。
假设在历史量测条件下不同目标的状态是相互独立的,那么问题变为所有目标的不相关估计,此时需要计算边缘关联概率。由联合概率计算边缘关联概率的方法是,将与该边缘关联概率的对应目标相关的关联事件进行求和(式(4)。进而不同目标的状态估计可以解耦,从而可以使用PDA中的状态估计方法。
式中:A(k)表示关联事件
针对JPDA中潜在的多个目标轨迹合并的问题,文献[21]提出了一种NNJPDA(Nearest Neighbor JPDA)方法,该方法选择最近的一个量测关联至航迹,而不是所有量测的概率平均。文献[19]将模糊聚类应用于JPDA中,用模糊C-均值聚类(FCM)算法代替PDA中原有的不同量测的概率加权方法,提出了适用于多目标跟踪的混合模糊概率数据关联HF-JPDA。文献[22]提出一种新的JPDA(Joint Possibilistic Data Association)方法,将原始JPDA中用于计算加权和的概率用可能性代替。JPDA方法存在的问题是不支持创建新航迹。
多假设跟踪(Multiple Hypothesis Tracking,MHT)最早由Donald[23]提出,适用于存在噪声和一定漏检率的多目标场景下的数据关联。MHT通过维持跟踪的目标轨迹的多种假设来延迟数据关联的最终判决,直到数据关联的不确定性得以解决后,再将不可能的假设去除,留下最可能的关联假设,从而实现数据关联的理论最优。MHT方法的核心问题是如何设计一个高效的剪枝策略,在保留有效假设的前提下实现快速剪枝。MHT方法具有以下特性:航迹初始化、航迹维持、航迹终止、考虑虚警和唯一性约束。
MHT分为track-oriented MHT(TOMHT)和hypothesis-oriented MHT(HOMHT)或measurement-oriented MHT(MOMHT)。TOMHT基于MMSE-ML[8]方法,使用矩阵表示不同的量测/目标关联,MOMHT基于MMSE-MAP[8]方法,使用目标树表示不同的量测/目标关联。MHT是一种多次扫描多假设的方法,单次扫描单假设的JPDA是MHT的一种特例。
MHT中的一个假设是一组航迹的集合,该航迹集合产生自一个满足以下的分配条件:
(1)将当前时步中的所有量测分配给已知(在历史假设中已存在)目标、虚警目标或新目标;
(2)将在父假设中出现,但在该时步中未被分配任何量测的航迹分配为空(即漏检测的目标)。
每个目标维持多个假设航迹,每个假设航迹是由该目标在各个时步根据不同的假设分配得到的量测组成的量测序列。
表2 来自不同AIS数据源的数据质量统计
Tab. 2 A statistic of data quality from different AIS sources
| AIS数据 来源 | 总消息数 /(条/天) | 独立MMSI /(个/月) | 重复率 | 误包率 | 接收速率 平均值/(条/s) | 接收速率 标准差/(条/s) | 接收速率 最大值/(条/s) |
|---|---|---|---|---|---|---|---|
| 1 | 32 544 446 | 271 039 | 0.0432 | 0.0000 | 22 621 | 2254 | 35 365 |
| 2 | 6 781 701 | 217 269 | 0.0799 | 0.0133 | 4789 | 2428 | 33 773 |
| 3 | 7 628 919 | 28 202 | 0.4810 | 0.0040 | 5876 | 777 | 9436 |
| 4 | 19 113 170 | 103 966 | 0.3045 | 0.0113 | 13 794 | 2063 | 21 696 |
| 5 | 2 802 507 | 43 212 | 0.2291 | 0.0140 | 1953 | 562 | 30 266 |
| 6 | 3 656 542 | 37 428 | 0.1608 | 0.0017 | 2549 | 991 | 6769 |
| 7 | 8 704 245 | 58 736 | 0.0588 | 0.0053 | 6061 | 2893 | 22 326 |
| 8 | 874 060 | 6334 | 0.0885 | 0.0016 | 609 | 241 | 1457 |
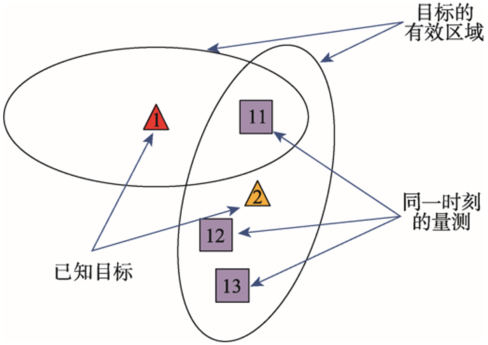
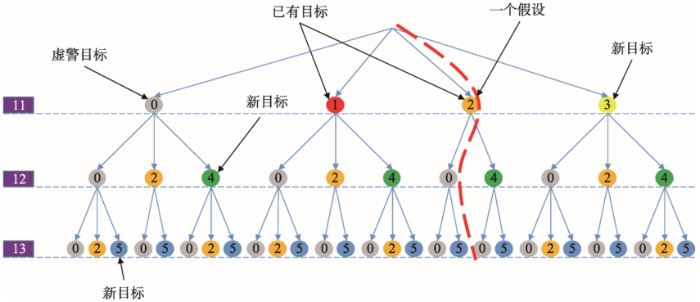
图5描述了一个包含2个已知目标和3个当前量测的关联场景,其中,目标编号分别为1和2,量测编号分别为11、12和13。图6给出了与关联场景相对应的假设树。对于量测11,因为其同时位于目标1和2的有效区域内,所以可以将其关联至目标1或2,同时该量测有可能是虚警目标或新目标。对于量测12,由于其仅位于目标2的有效区域内,在量测11关联至目标1、或为虚警目标或新目标的前提下,可以将其关联至目标2,同时该量测有可能是虚警目标或新目标;在量测11关联至目标2时,根据唯一性原则,量测12只能判为虚警目标或新目标。对于量测13,其判断同量测12,但需要在量测11和12已关联的前提下进行。在量测次序固定的前提下,假设树中由根结点至叶结点的路径上的目标序列形成一个假设。
为降低计算复杂度,一般将假设分为不同的簇(或组),每个簇由共享某个量测的多个目标组成,且不同簇中的目标在任何假设下都不会直接或间接共享任何量测。每个簇可以看作是由因模糊关系连接的目标组成的极大联通图,因而各个簇是相互独立的,可以各自更新,从而将一个大问题域划分为多个相互独立的小问题域。
文献[24]针对Reid提出的MHT方法进行了一种高效实现,并将Murty算法[25]应用于生成 k-best 假设中。相对于已知的最好算法,优化后的Murty算法将算法复杂度降为多项式时间O(N2)(最坏情况下的时间复杂度为O(N4),N为k-best假设中假设的数量k)。文献[26]对MHT在视觉跟踪中的使用方法进行了改进,提出了一种学习在线表观模型的方法,并将表观模型应用到仅依靠运动模型的传统MHT中以增强算法的鲁棒性,从而在保证不减小有效区域范围的情况下,加速MHT的剪枝。该文献的MHT-DAM方法在视觉跟踪中的性能优于标准的MHT方法,并且与视觉跟踪中最好的方法性能相当。在该文献中的剪枝方法包括定时剪枝、定量剪枝和DAM(Discriminative Appearance Modeling)模型剪枝。文献[27]将MHT方法应用于遥感图像中海上浮冰的目标跟踪,通过将RTree索引方法应用于MHT中簇的检索,并用矩形边界关联门限代替椭圆边界关联门限,来提高算法的性能。
MHT方法存在的问题是计算复杂度高,噪声分布需是已知的。
其他的MTTA方法有隐马尔可夫模型[28]、模糊逻辑[29]等。
在TTTA中,数据关联方法主要用于解决,在各传感器存在不同的系统误差和漏检率的情况下,如何将各个传感器产生的本地航迹关联成融合系统中的一条航迹。TTTA根据关联原理可分为基于统计方法和基于模糊数学的2种实现方式。
基于统计方法的航迹关联方法主要有NN[30]、K-NN[31]、MK-NN[32]、双门限[33]、序贯法[34]等。NN法将一个传感器中的航迹与另一传感器中与其距离最近的一个航迹进行关联,仅考虑航迹间当前时刻的单次相关性,鲁棒性较差,但该方法原理简单,主要适用于目标稀疏的场景。K-NN方法针对NN的单次相关的问题,考虑了历史相关性,当2条航迹在最近的R次相关判断中至少有K次满足相关性的要求时,才初步判定这2条航迹相关。K-NN的相关检验过程包括建立期、相关期、巩固期、检查期和保持期5个阶段,K-NN的计算复杂度比NN要高。MK-NN方法对K-NN方法进行了修正,将相关检验的过程简化为相关期、检查和保持期2个阶段。与K-NN相比,在计算复杂度降低的同时,性能还有所提升。双门限方法借鉴了信号检测中的双门限准则,在航迹相关检验的过程中设置了2个门限,第一门限作为2条航迹判为相关时需满足的状态估计间的距离阈值;第二门限表示2条航迹基于第一门限被判定为相关的次数阈值,仅当小于第一门限且超过第二门限时,2个航迹才被判定为真正相关。序贯法定义了2个局部节点的航迹到当前时刻所经历的所有状态估计之差这一事件,并基于事件中各个状态估计差之间的独立性,计算联合概率密度 函数,进而通过计算2个航迹的似然比对2个航迹是否相关进行检验。对于不同传感器的系统误差对航迹关联的影响问题,当前主要有2种解决方法:①文献[35]中采用的联合航迹相关与传感器配准的方式,该方法中航迹相关和传感器配准2个步骤交替迭代,相互优化;②文献[36]中所采用的通过定义航迹的参照拓扑(Reference Topology,REF)这一结构特征来消除不同传感器间系统误差的方式,文献[37]采用OSPA来计算2条航迹的REP之间的距离。序贯法利用的是航迹在时间维度上的纵向特征,即自己的历史状态信息;参照拓扑结构法利用的是航迹在空间维度上的横向特征,即与邻居目标的相对位置信息。
除此之外,还可从轨迹或时间序列相似性度量的角度进行航迹相关判断。文献[38,39,40,41]对常用的轨迹相似性的度量方法进行了介绍,如DTW、LCSS、EDR和ERP等。
受海上环境的复杂性和各种测量手段的系统误差、随机误差及其探测范围并不完全相同等因素的影响,不同传感器的本地航迹之间的相似性存在着模糊性,因而可以采用模糊数学相关的理论对航迹相关性进行判断。文献[42]采用模糊双门限的方法进行航迹关联判断,该文献中定义了模糊因素集以及其之上的模糊集,通过对各个模糊因素的隶属度进行加权平均,得到2个航迹的综合相似度,并构造模糊相关矩阵,然后基于最大综合相似度和阈值原则进行航迹相关检验。文献[43]基于模糊聚类方法(FCM),通过计算各个目标轨迹点的隶属度实现同一目标的多个航迹的关联,并通过选择最好(误差最小)的航迹点或加权融合后的航迹点来更新目标的融合状态估计。
对数据关联方法进行评估主要有基于模拟数据的蒙特卡洛仿真和基于真实数据的评估2种方法。
文献[44]采用蒙特卡洛方法对100个目标、3部雷达,在不同的测距误差和测角误差下进行仿真,并对GPU平台和CPU平台上的实现进行性能对比。文献[45]采用蒙特卡洛方法对通过3部雷达观测8到16个匀速直线运动目标的关联进行了仿真。文献[46]仿真了使用2部雷达组网跟踪10个匀速直线运动的平行编队目标。文献[47]用蒙特卡洛方法分别模拟了航迹分叉、航迹合并和航迹交叉3种环境,关联准则采用独立序贯法的准则,目标被模拟为在两维平面上变速、存在有意和无意机动。文献[48]针对其矩形网格分割方法对目标数为1600~3200个、传感器数为2~8个的场景进行了仿真,并对计算效率进行了评估。文献[49]通过蒙特卡罗方法仿真了3个匀速直线运动的编队目标,传感器分别为雷达和ESM。文献[13]基于不同的运动模型分别模拟了杂波环境下匀速直线交叉运行、加速转弯交叉机动运行等场景。
文献[50,51]对波罗的海上航行船舶的AIS和雷达数据进行航迹关联。文献[52]对来自三艘船舶的雷达数据和AIS数据进行航迹关联。文献[53]使用两批地波雷达的实测数据开展了分析,包括覆盖实验区的地波雷达数据和同步AIS数据,涵盖100个左右目标。文献[54]将亚丁湾海域的卫星SAR和AIS数据关联,检测不发送AIS数据的船。文献[55]针对高频地波雷达(HFSWR)和自动识别系统(AIS)目标点迹的融合利用问题,分别采用2011-2013年中各一天的某时段的雷达和AIS数据进行关联验证。文献[56]通过选取东经108.1° ~108.6°E,20.5°~21.1° N范围内,来自2部不同型号雷达和AIS的1 h内的报文,进行关联评估。
现有数据关联评估方法在场景设计中存在的问题是目标数量较少,场景类型简单,传感器种类相对单一,与真实场景相差较大。针对面向真实场景的数据关联评估问题,实现并开源了一个船舶运动仿真数据生成软件[57]。基于利用全球船舶历史轨迹数据挖掘出的船舶分布和运动模型,该软件可实时模拟全球任一指定区域内,普通、稀疏和密集等多种不同场景下,AIS、北斗和雷达等多种传感器来源产生的仿真数据。
本文针对海上目标多源轨迹数据关联这一问题,从航迹关联的数据来源、问题分类及解决方法和方法评估4个方面进行了总结。航迹关联数据来源方面,主要从信息类型、定位精度、覆盖范围和更新频率4个方面对雷达、AIS、北斗、Argos和LRIT 5种类型的传感器数据进行了介绍和对比,说明了航迹关联和融合的必要性与可行性。航迹关联问题分类方面主要介绍了MTTA和TTTA 2种类型的航迹关联问题。MTTA方面,主要对NN、PDA、JPDA、MHT 4种经典算法进行了介绍。NN方法简单且易于实现,主要应用于杂波较少,目标密度较低的场景;PDA主要用于单目标,但其不支持目标航迹的创建;JPDA是对PDA的改进,适用于多目标,同样不支持目标航迹的创建;MHT是一种多次扫描多假设数据关联方法,JPDA作为单次扫描单假设方法可以看做MHT的一种特例。MHT支持目标航迹的创建、维持和终止,考虑虚警和唯一性约束,主要问题是算法复杂度较高。TTTA方面,主要有基于统计方法的关联方法和基于模糊数学的关联方法,基于统计方法的航迹关联方法包括NN/K-NN/MK-NN、双门限法、序贯法、参照拓扑法和联合航迹关联与传感器配准的方法;基于模糊数学的航迹关联方法主要是如何构造和定义模糊因素集和隶属度函数,以及求解分配问题的最优解。对数据关联方法进行评估主要有基于模拟数据的蒙特卡洛仿真和基于真实数据的评估2种方法。
数据关联作为一个不断迭代的计算过程,需要关联计算和关联评估2个子过程的交替进行来推进。因而,对于数据关联的研究主要集中在关联计算方法本身和关联评估方法2个方面。目前的研究现状是,数据关联计算方法的研究居多,而数据关联评估方法的研究则相对较少。在实际运用中,考虑到实现需简单稳定和应用场景中目标数目较少,大多采用较为简单的NN和JPDA 2种MTTA方法。当面对像“一带一路”这样存在大规模目标的复杂场景时,NN和JPDA受方法所限,关联效果将难以满足要求。MHT作为数据关联中一种理论上的最优方法,当处理大量目标时,其计算复杂度将指数级增加,因而如何实现MHT在数据关联中保证关联准确度的情况下进行有效剪枝,控制多假设树的规模,从而降低计算的时间复杂度和空间复杂度,是需要进一步研究的方向。同时,MHT目前主要应用在MTTA中,如何对该方法进行改进以应用于TTTA中也是值得研究的方向。另外,深度学习中的LSTM网络由于其对时间序列数据强大的处理能力,已被广泛应用于语音识别、自然语言处理等领域,考虑到轨迹数据是一种典型的时间序列数据,可以尝试将两者进行结合。数据关联评估方法方面,现有的方法主要采用实验环境下的仿真或小规模的真实数据,且需要通过人工判别进行评估。而在真实场景下,量测中并不含有标识目标真实身份的信息且数据量巨大,人工判别将不再适用,因此如何对真实场景下大量数据的实时关联效果自动进行有效评估是一个值得研究的方向。
The authors have declared that no competing interests exist.
| [1] |
Technical characteristics for an automatic identification system using time-division multiple access in the VHF maritime mobile band [S]. |
| [2] |
|
| [3] |
Argos系统的发展现状与趋势 [J].
Argos系统作为具备单星定位能力的卫星通信系统,具有功耗低、体积小、全球覆盖以及数据实时性较好等优点,目前在对自然环境的科学观测中得到了广泛应用。从系统运行的角度,阐述了组成系统的平台部分、空间部分和地面部分;结合第二代和第三代Argos系统,分析了平台终端、空间卫星、地面系统以及主要应用四个方面的发展现状;最后对Argos系统发展趋势进行了探讨和展望。
Present status and development trend of Argos system [J].
Argos系统作为具备单星定位能力的卫星通信系统,具有功耗低、体积小、全球覆盖以及数据实时性较好等优点,目前在对自然环境的科学观测中得到了广泛应用。从系统运行的角度,阐述了组成系统的平台部分、空间部分和地面部分;结合第二代和第三代Argos系统,分析了平台终端、空间卫星、地面系统以及主要应用四个方面的发展现状;最后对Argos系统发展趋势进行了探讨和展望。
|
| [4] |
263(84). Revised performance standards and functional requirements for the long-range identi-fication and tracking of ships [S]. |
| [5] |
1/Circ.1259/Rev.4 Long-range identification and tracking system technical documentation (part i) [S]. |
| [6] |
1/Circ.1294/Rev.2 Long-range identification and tracking system technical documentation (part ii) [S]. |
| [7] |
|
| [8] |
The probabilistic data association filter estimation in the presence of meas-urement origin uncertainty [J]. |
| [9] |
A new approach to linear filtering and prediction problems [J].https://doi.org/10.1115/1.3662552 URL [本文引用: 1] |
| [10] |
An introduction to the Kalman filter[Z]. Department of Computer Science, University of North Carolina. ed: Chapel Hill, NC, |
| [11] |
New extension of the Kalman filter to nonlinear systems [C]. |
| [12] |
Van Der Merwe R. The unscented Kalman filter for nonlinear estimation [C]. |
| [13] |
A new nearest-neighbor association approach based on fuzzy clustering [J].https://doi.org/10.1016/j.ast.2012.02.017 URL [本文引用: 2] 摘要
The main components of tracking in multisensor data fusion systems are estimation and data association. This paper proposes a new nearest-neighbor fuzzy association approach for multitarget tracking in a cluttered environment. In the proposed approach, fuzzy clustering is used to generate a likelihood measure in place of the traditional Mahalanobis distance. First, measurements-to-tracks associations are computed jointly across all targets and all validated measurements using fuzzy clustering, then nearest-neighbor correlation is performed based on fuzzy correlation weights. For a given target, the validated measurement that has the maximum fuzzy correlation weight is used for updating the state of the target. The proposed approach determines the association between the measurements and the tracks based on a single correlation matrix, thus it highly reduces the computational complexity compared to the joint probabilistic data association filter and the conventional fuzzy logic data association approaches. The performance of the proposed approach is evaluated using Monte Carlo simulations and compared to that of the nearest-neighbor association with Mahalanobis distance, conventional fuzzy logic data association approaches, and joint probabilistic data association filter. The results show that the proposed approach achieves better performance compared to the nearest-neighbor association with Mahalanobis distance and the conventional fuzzy logic data association approaches. The results also show that the performance of the proposed approach is not far from the performance of the joint probabilistic data association filter. Suggested steps for the proposed approach to be utilized to counter against Electronic Counter Measures techniques are also presented.
|
| [14] |
Tracking in a cluttered environment with probabilistic data association [J].https://doi.org/10.1016/0005-1098(75)90021-7 URL [本文引用: 1] 摘要
This paper presents a new approach to the problem of tracking when the source of the measurement data is uncertain. It is assumed that one object of interest (‘target’) is in track and a number of undesired returns are detected and resolved at a certain time in the neighbourhood of the predicted location of the target's return. A suboptimal estimation procedure that takes into account all the measurements that might have originated from the object in track but does not have growing memory and computational requirements is presented. The probability of each return (lying in a certain neighborhood of the predicted return, called ‘validation region’) being correct is obtained—this is called ‘probabilistic data association’ (PDA). The undesired returns are assumed uniformly and independently distributed. The estimation is done by using the PDA method with an appropriately modified tracking filter, called PDAF. Since the computational requirements of the PDAF are only slightly higher than those of the standard filter, the method can be useful for real-time systems. Simulation results obtained for tracking an object in a cluttered environment show the PDAF to give significantly better results than the standard filter currently in use for this type of problem.
|
| [15] |
Mixture reduction algorithms for target tracking in clutter [J]. |
| [16] |
Radar tracking with an interacting multiple model and probabilistic data association filter for civil aviation applications [J].https://doi.org/10.3390/s130506636 URL PMID: 3690073 [本文引用: 1] 摘要
The current trend of the civil aviation technology is to modernize the legacy air traffic control (ATC) system that is mainly supported by many ground based navigation aids to be the new air traffic management (ATM) system that is enabled by global positioning system (GPS) technology. Due to the low receiving power of GPS signal, it is a major concern to aviation authorities that the operation of the ATM system might experience service interruption when the GPS signal is jammed by either intentional or unintentional radio-frequency interference. To maintain the normal operation of the ATM system during the period of GPS outage, the use of the current radar system is proposed in this paper. However, the tracking performance of the current radar system could not meet the required performance of the ATM system, and an enhanced tracking algorithm, the interacting multiple model and probabilistic data association filter (IMMPDAF), is therefore developed to support the navigation and surveillance services of the ATM system. The conventional radar tracking algorithm, the nearest neighbor Kalman filter (NNKF), is used as the baseline to evaluate the proposed radar tracking algorithm, and the real flight data is used to validate the IMMPDAF algorithm. As shown in the results, the proposed IMMPDAF algorithm could enhance the tracking performance of the current aviation radar system and meets the required performance of the new ATM system. Thus, the current radar system with the IMMPDAF algorithm could be used as an alternative system to continue aviation navigation and surveillance services of the ATM system during GPS outage periods.
|
| [17] |
The interacting multiple model algorithm for systems with Markovian switching coefficients [J].https://doi.org/10.1109/9.1299 URL [本文引用: 1] 摘要
An important problem in filtering for linear systems with Markovian switching coefficients (dynamic multiple model systems) is the one of management of hypotheses, which is necessary to limit the computational requirements. A novel approach to hypotheses merging is presented for this problem. The novelty lies in the timing of hypotheses merging. When applied to the problem of filtering for a linear system with Markovian coefficients this yields an elegant way to derive the interacting multiple model (IMM) algorithm. Evaluation of the IMM algorithm makes it clear that it performs very well at a relatively low computational load. These results imply a significant change in the state of the art of approximate Bayesian filtering for systems with Markovian coefficients.
|
| [18] |
IMM fuzzy probabilistic data association algorithm for tracking maneuvering target [J].https://doi.org/10.1016/j.eswa.2006.12.007 URL [本文引用: 1] 摘要
In this paper, a new interacting multiple model fuzzy probabilistic data association (IMM-FPDA) algorithm is proposed for tracking maneuvering target. In the proposed tracker, fuzzy logic is incorporated in a conventional IMM-PDA method. In order to determine process noise covariance of the Kalman filter used in IMM-PDA, the prediction error and change of the prediction error in the last prediction are used as fuzzy inputs. To optimize parameters of the fuzzy system, a tabu search algorithm is utilized. The IMM-FPDA tracker combines advantages of the FPDA and IMM algorithms. The performance of the proposed algorithm is compared with those of the IMM and PDA-IMM algorithms using two different maneuvering tracking scenarios. It is shown from simulation results that the IMM-FPDA algorithm greatly outperforms the IMM and IMM-PDA algorithms in terms of tracking error.
|
| [19] |
Hybrid fuzzy probabilistic data association filter and joint probabilistic data asso-ciation filter [J].https://doi.org/10.1016/S0020-0255(02)00166-4 URL [本文引用: 2] 摘要
Multitarget tracking problems are theoretically interesting because, unlike other estimation problems, the origins of the measurements are not identified. This involves hypothesis generation and their evaluation in terms of degree of agreement between the given measurements and the underlying tracks. Typical algorithms to deal with such problems are the probabilistic data association filter (PDAF) in the case of single target tracking and joint probabilistic data association filter (JPDAF) in the case of multiple target tracking proposed by Bar-Shalom and his team. The basis of JPDAF is the calculus of the joint probabilities over all targets and hits. The algorithm assigns weights for reasonable hits and uses a weighted centroid of those hits to update the track. In this paper, we propose a new weight assignment based on fuzzy c -means methodology. Particularly, in order to take account for the false alarms (clutter) where none of the measurements is target originated, a new noisy fuzzy c -means algorithm is elaborated. The latter contrasts with that provided by Dave regarding the location of the noise prototype as well as the meaning of the universality of the noise class. The treatment of conflictual situations where, for instance, more than one hit fail in a target extension gate is accomplished using some weighted based procedure with respect to all feasible joint matrices involved in the construction of joint probabilities in JPDAF. In the meantime, the general methodology of PDAF and JPDAF remains unchanged. This leads to Hybrid Fuzzy PDAF in the case of single target tracking and Hybrid Fuzzy JPDAF in the case of multiple target tracking. This investigation shows a fruitful combination between fuzzy and probabilistic approaches in order to accomplish target tracking tasks.
|
| [20] |
Sonar tracking of multiple targets using joint probabilistic data asso-ciation [J].https://doi.org/10.1109/JOE.1983.1145560 URL [本文引用: 1] |
| [21] |
IMM estimator with nearest-neighbor joint probabilistic data association [J]. |
| [22] |
A joint possibilistic data association technique for tracking multiple targets in a cluttered environ-ment [J].https://doi.org/10.1016/j.ins.2014.04.055 URL [本文引用: 1] 摘要
Multitarget tracking in a cluttered environment is a significant issue with a wide variety of applications. A typical approach to address this issue is the joint probabilistic data association (JPDA) technique. This technique determines joint probabilities over all targets and hits and updates the predicted target state estimate using a probability-weighted sum of innovations. This paper proposes a new joint possibilistic data association technique for tracking multiple targets. Unlike the JPDA technique, the proposed technique determines joint possibilities over all targets and hits and updates the predicted target state estimate using a possibility-weighted sum of innovations. The possibility weights are determined using the noise covariance matrices and the current received measurements such that the total sum of the distances between all measurements and targets is minimized. The proposed technique performs data association based on a possibility matrix of measurements to trajectories; thus, it highly reduces the computational complexity compared to conventional data association techniques. The proposed association technique is applied to examples of multitarget tracking in a cluttered environment, and the results demonstrate its efficiency.
|
| [23] |
An algorithm for tracking multiple targets [J].https://doi.org/10.1109/CDC.1978.268125 URL [本文引用: 1] 摘要
An algorithm for tracking multiple targets in a cluttered environment is developed. The algorithm is capable of initiating tracks, accounting for false or missing reports, and processing sets of dependent reports. As each measurement is received, probabilities are calculated for the hypotheses that the measurement came from previously known targets in a target file, or from a new target, or that the measurement is false. Target states are estimated from each such data-association hypothesis, using a Kalman filter. As more measurements are received, the probabilities of joint hypotheses are calculated recursively using all available information such as density of unknown targets, density of false targets, probability of detection, and location uncertainty. This branching technique allows correlation of a measurement with its source based on subsequent, as well as previous, data. To keep the number of hypotheses reasonable, unlikely hypotheses are eliminated and hypotheses with similar target estimates are combined. To minimize computational requirements, the entire set of targets and measurements is divided into clusters that are solved independently. In an illustrative example of aircraft tracking, the algorithm successfully tracks targets over a wide range of conditions.
|
| [24] |
An efficient implementation of Reid's multiple hypothesis tracking algorithm and its evaluation for the purpose of visual tracking [J].https://doi.org/10.1109/34.481539 URL [本文引用: 1] 摘要
Abstract-n efficient implementation of Reid's multiple hypothesis tracking (MHT) algorithm is presented in which the k-best hypotheses are determined in polynomial time using an algorithm due to Murty[<ref rid="bibi013824" type="bib">24]. The MHT algorithm is then applied to several motion sequences. The MHT capabilities of track initiation, termination, and continuation are demonstrated together with the latter's capability to provide low level support of temporary occlusion of tracks. Between 50 and 150 corner features are simultaneously tracked in the image plane over a sequence of up to 51 frames. Each corner is tracked using a simple linear Kalman filter and any data association uncertainty is resolved by the MHT. Kalman filter parameter estimation is discussed, and experimental results show that the algorithm is robust to errors in the motion model. An investigation of the performance of the algorithm as a function of look-ahead (tree depth) indicates that high accuracy can be obtained for tree depths as shallow as three. Experimental results suggest that a real-time MHT solution to the motion correspondence problem is possible for certain classes of scenes.
|
| [25] |
An algorithm for ranking all the assignments in order of increasing costs [J].https://doi.org/10.1287/opre.16.3.682 URL [本文引用: 1] |
| [26] |
Multiple hypothesis tracking revisited [C]. |
| [27] |
Spatially indexed clustering for scalable tracking of remotely sensed drift ice [C]. |
| [28] |
A data association approach for multitarget tracking based on a Hidden Markov Model [C]. |
| [29] |
Vessel track correlation and association using fuzzy logic and echo state networks [C]. |
| [30] |
Computer control of multiple site track correlation [J].https://doi.org/10.1016/0005-1098(71)90096-3 URL [本文引用: 1] 摘要
Present procedures for multiple site track correlation, an important operational element of air traffic control systems, are often empirically based and implemented using human operators. The effectiveness of these techniques as well as some proposed computer oriented techniques degrades significantly in high track density environments. In this paper several new computer correlation techniques are presented, each providing considerable improvement in performance at low computer cost. Six techniques are examined theoretically and, using a simulated scenario, compared in terms of correlation accuracy and computer requirements. The coarse-fine technique, which uses coordinate gates for limiting the number of tracks examined in the correlation process and scalar sums composed of measurement vectors and their accuracies to select among the remaining tracks, is shown to be generally suitable for implementation and to provide correlation accuracies near unity.
|
| [31] |
多传感器综合系统中的航迹相关算法 [J].Track correlation algorithm in multisensor fusion system [J]. |
| [32] |
一种多目标多传感器航迹相关算法 [J].
提出一种适合于分布式多传感器数据融合的新的航迹相关算法(MK-NN)。对其航迹相关准则进行了详细的描述,研究了航迹质量设计、多义性处理、阈值选择和算法的相关检验过程,并通过仿真把它与最近邻域法(NN)和K近邻域法(K-NN)进行了比较。仿真结果表明,在密集目标环境下和/或交叉、分岔及机动航迹较多的场合,MK-NN算法的性能明显优于NN法,其正确相关率比NN法提高了约40%。MK-NN与K-NN相比不但正确相关率获得约5%的改善,而且处理速度也提高了约一倍。
New track correlation algorithm for multitarget and multisensor tracking [J].
提出一种适合于分布式多传感器数据融合的新的航迹相关算法(MK-NN)。对其航迹相关准则进行了详细的描述,研究了航迹质量设计、多义性处理、阈值选择和算法的相关检验过程,并通过仿真把它与最近邻域法(NN)和K近邻域法(K-NN)进行了比较。仿真结果表明,在密集目标环境下和/或交叉、分岔及机动航迹较多的场合,MK-NN算法的性能明显优于NN法,其正确相关率比NN法提高了约40%。MK-NN与K-NN相比不但正确相关率获得约5%的改善,而且处理速度也提高了约一倍。
|
| [33] |
陆大䋮,等.分布式多传感器数据融合中的双门限航迹相关算法 [J].
本文提出两种适合于分布式多传感器数据融合的双门限航迹相关算法.文中对这两种双门限航迹相关准则进行了详细的描述,研究了航迹相关质量设计、多义性处理和漏相关概率的估计方法,并通过仿真将它们与两个经典方法进行了比较.仿真结果表明,在密集目标环境下和/或交叉、分岔和机动航迹较多的场合,双门限航迹相关算法的性能明显优于传统方法,其正确相关率比传统方法提高了大约35%.
Binary track correlation algorithms in a distributed multisensor data fusion system [J].
本文提出两种适合于分布式多传感器数据融合的双门限航迹相关算法.文中对这两种双门限航迹相关准则进行了详细的描述,研究了航迹相关质量设计、多义性处理和漏相关概率的估计方法,并通过仿真将它们与两个经典方法进行了比较.仿真结果表明,在密集目标环境下和/或交叉、分岔和机动航迹较多的场合,双门限航迹相关算法的性能明显优于传统方法,其正确相关率比传统方法提高了大约35%.
|
| [34] |
陆大䋮,等,多传感器数据融合系统中两种新的航迹相关算法 [J].Two new track correlation algorithms in a multisensor data fusion system [J]. |
| [35] |
Joint track-to-track association and sensor registration at the track level [J].https://doi.org/10.1016/j.dsp.2015.03.012 URL [本文引用: 1] 摘要
A joint approach is developed in this paper to simultaneously deal with the problem of track-to-track association and sensor registration at the track level. In previous research, it is usually supposed that sensor biases are directly imposed on local estimates, and only relative biases of sensors can be estimated. However, for some practical sensors such as the radar sensor, the measurement process is implemented in the local polar coordinate system. Thus, sensor biases are imposed on sensor measurements and included implicitly in local estimates represented in the global Cartesian coordinate system. In our previous work, a pseudo-measurement equation based on the first-order Taylor series expansion was derived revealing the relationship explicitly between local estimates and sensor biases. In this paper, by assuming that sensor biases are imposed on the original sensor measurements, we construct a novel mixed integer nonlinear programming (MINLP) model in the maximum likelihood rule. The model serves to determine the correspondence between local tracks and provide an access to estimate the absolute sensor biases in a recursive way. Several heuristic solution methods, including ‘Single-start’, ‘Gaussian Multi-start’, ‘K-best’ are implemented to handle the resulting MINLP model. Performance comparisons and analyses are made to illustrate the efficiency of the proposed approach.
|
| [36] |
A novel fuzzy pattern recognition data association method for biased sensor data [C]. |
| [37] |
Track-to-track association for biased data based on the reference topology feature [J].https://doi.org/10.1109/LSP.2014.2305305 URL [本文引用: 1] 摘要
In this letter, we propose a novel track-to-track association (TTTA) algorithm based upon the reference topology (RET) feature, which is insensitive to sensor biases. A rigorous mathematical definition of RET is presented. The insensitivity of RET to sensor biases is analyzed theoretically. In order to construct the association cost matrix, we make use of the optimal subpattern assignment (OSPA) metric to measure the distance between two RETs. Simulation results demonstrate the advantages of the proposed algorithm.
|
| [38] |
On the marriage of lp-norms and edit distance [C]. |
| [39] |
Trajectory data mining: an overview [J]. |
| [40] |
Trajectory similarity measures [J]. |
| [41] |
Review on trajectory similarity measures [C]. |
| [42] |
陆大䋮.多目标多传感器模糊双门限航迹相关算法 [J].Fuzzy track correlation algorithms for multitarget and multisensor tracking [J]. |
| [43] |
Fuzzy track-to-track association and track fusion approach in distributed multisensor-multitarget multiple-attribute environment [J].https://doi.org/10.1016/j.sigpro.2007.01.001 URL [本文引用: 1] 摘要
A great deal of attention is currently focused on multisensor data fusion. Multisensor data fusion combines data from multiple sensor systems to achieve improved performance and provide more inferences than could be achieved using a single sensor system. One of the most important aspects of it is track-to-track-association. This paper develops a fuzzy data fusion approach to solve the problem of track-to-track association and track fusion in distributed multisensor-ultitarget multiple-attribute environments in overlapping coverage scenarios. The proposed approach uses the fuzzy clustering means algorithm to reduce the number of target tracks and associate duplicate tracks by determining the degree of membership for each target track. It uses current sensor data and the known sensor resolutions for track-to-track association, track fusion, and the selection of the most accurate sensor for tracking fused targets. Numerical results based on Monte Carlo simulations are presented. The results show that the proposed approach significantly reduces the computational complexity and achieves considerable performance improvement compared to Euclidean clustering. We also show that the performance of the proposed approach is reasonable close to the performance of the Bayesian minimum mean square error criterion.
|
| [44] |
GPU加速的航迹关联改进蚁群求解算法 [J].Improved ant colony solution algorithm accelerated by GPU in track correlation [J]. |
| [45] |
多雷达多目标跟踪中的航迹关联算法研究[D] .Study of track correlation algorithm in multi-radar and multi-target tracking[D] . |
| [46] |
分布式雷达网航迹关联的一种新方法 [J].https://doi.org/10.3969/j.issn.1674-2230.2008.05.007 URL [本文引用: 1] 摘要
在分布式雷达网中,航迹关联的正确率直接影响到雷达网的跟踪精度,就此提出了一种基于曲线拟 合的航迹关联方法。该方法不会出现航迹漏关联的情况,且无需进行多义性处理,原理简单,易于实现。仿真结果表明,该航迹关联方法是确实有效的,且在一定条 件下,关联正确率明显高于传统方法。
A new track correlation method in distributed radar network [J].https://doi.org/10.3969/j.issn.1674-2230.2008.05.007 URL [本文引用: 1] 摘要
在分布式雷达网中,航迹关联的正确率直接影响到雷达网的跟踪精度,就此提出了一种基于曲线拟 合的航迹关联方法。该方法不会出现航迹漏关联的情况,且无需进行多义性处理,原理简单,易于实现。仿真结果表明,该航迹关联方法是确实有效的,且在一定条 件下,关联正确率明显高于传统方法。
|
| [47] |
几种典型情况下的航迹关联研究 [J].Study of track association in typical cases [J]. |
| [48] |
大批量目标航迹关联加速算法 [J].https://doi.org/10.3969/j.issn.1001-893x.2014.12.010 URL [本文引用: 1] 摘要
针对分布式航迹关联耗时较多的问题,提出了一种加快处理速度的新算法.该方法首先将平面等分割成很多矩形网格;其次,根据关联门限计算关联的矩形网格集合;最后,根据关联网格集合选定待关联目标,从而减少关联次数,提高处理速度.仿真试验表明,当目标数为1600以上、传感器数为2以上时,航迹关联加速算法比一般航迹关联算法的处理速度高出30倍以上.
An accelerated track association algorithm for a large number of targets [J].https://doi.org/10.3969/j.issn.1001-893x.2014.12.010 URL [本文引用: 1] 摘要
针对分布式航迹关联耗时较多的问题,提出了一种加快处理速度的新算法.该方法首先将平面等分割成很多矩形网格;其次,根据关联门限计算关联的矩形网格集合;最后,根据关联网格集合选定待关联目标,从而减少关联次数,提高处理速度.仿真试验表明,当目标数为1600以上、传感器数为2以上时,航迹关联加速算法比一般航迹关联算法的处理速度高出30倍以上.
|
| [49] |
系统误差下异地配置的雷达和电子支援测量航迹关联 [J].
针对系统误差下异地配置的雷达和ESM航迹关联问题,提出了一种基于位置统计量和最大似然准则的异类传感器航迹关联算法。首先,基于位置统计量对目标进行了航迹粗关联,排除掉一些虚假关联组合;接着,在此基础上采用最大似然准则对目标进行了航迹细关联,以求进一步提高雷达和ESM航迹关联的检测概率。仿真结果表明,与现有算法相比,该算法可较好地完成对多目标的航迹关联。
Track association of radar and esm sensors with systematic errors at different sites [J].
针对系统误差下异地配置的雷达和ESM航迹关联问题,提出了一种基于位置统计量和最大似然准则的异类传感器航迹关联算法。首先,基于位置统计量对目标进行了航迹粗关联,排除掉一些虚假关联组合;接着,在此基础上采用最大似然准则对目标进行了航迹细关联,以求进一步提高雷达和ESM航迹关联的检测概率。仿真结果表明,与现有算法相比,该算法可较好地完成对多目标的航迹关联。
|
| [50] |
Stateczny A. Radar and automatic identification system track fusion in an electronic chart display and information system [J].https://doi.org/10.1017/S0373463315000405 URL [本文引用: 1] 摘要
This paper presents the results of research on the fusion of tracking radar and an Automatic Identification System (AIS) in an Electronic Chart Display and Information System (ECDIS). First, the concept of these systems according to the International Maritime Organization (IMO) is described, then a set of theoretical information on radar tracking and the fusion method itself is given and finally numerical results with real data are presented. Two methods of fusion, together with their parameters, are examined. A proposal for calculating the covariance matrix for radar and AIS data is also given, and the paper ends with conclusions.
|
| [51] |
Proposal of neural approach to maritime radar and automatic identification system tracks as-sociation [J].https://doi.org/10.1049/iet-rsn.2016.0409 URL [本文引用: 1] 摘要
This study presents results of a study on association of targets tracked with an automatic identification system and marine tracking radar. This paper shows various approaches for solving association problem. Description of selected numerical methods is given, followed by an experimental evaluation, showing advantages and disadvantages for each of them. On the other hand, novel approach is proposed: namely, the use of neural networks for this task. Association is defined as a classification problem and suitable neural networks are selected and trained. Each pair of targets is being classified with neural filter, stating if association takes place. The main advantage of this approach is its flexibility in adjusting to current data. Neural networks can be trained during data processing to adjust to current situation, which is not the case in a priori defined numerical models. Experimental verification of the proposed solution and comparison of neural networks with numerical methods is included. The results obtained indicate that neural networks are an interesting alternative to numerical methods.
|
| [52] |
Study of data fusion of AIS and radar [C]. |
| [53] |
基于模糊双门限的高频地波雷达与AIS目标航迹关联方法 [J].https://doi.org/10.3969/j.issn.1001-506X.2016.03.13 URL Magsci [本文引用: 1] 摘要
提出了一种基于模糊双门限的地波雷达与船只身份自动识别系统(automatic identification system,AIS)目标航迹关联方法,该方法主要是利用模糊隶属度来描述两条航迹间的关联程度,并通过双门限检测来确定关联的航迹对。具体讨论分析了算法中展度、权重、调整因子等参数的选取原则,最后利用2011年10月31和2013年9月6日获取的两批实测地波雷达与AIS数据将本文方法与最近邻航迹关联算法做了对比,结果表明,此方法的关联率高于最近邻航迹关联算法,并且在航迹较为复杂情况下,提出的航迹关联算法具有更好的稳定性。
Track association for high-frequency surface wave radar and AIS based on fuzzy double threshold theory [J].https://doi.org/10.3969/j.issn.1001-506X.2016.03.13 URL Magsci [本文引用: 1] 摘要
提出了一种基于模糊双门限的地波雷达与船只身份自动识别系统(automatic identification system,AIS)目标航迹关联方法,该方法主要是利用模糊隶属度来描述两条航迹间的关联程度,并通过双门限检测来确定关联的航迹对。具体讨论分析了算法中展度、权重、调整因子等参数的选取原则,最后利用2011年10月31和2013年9月6日获取的两批实测地波雷达与AIS数据将本文方法与最近邻航迹关联算法做了对比,结果表明,此方法的关联率高于最近邻航迹关联算法,并且在航迹较为复杂情况下,提出的航迹关联算法具有更好的稳定性。
|
| [54] |
Data fusion for wide-area maritime surveillance [C]. |
| [55] |
地波雷达与自动识别系统目标点迹最优关联算法 [J].https://doi.org/10.11999/JEIT140678 Magsci [本文引用: 1] 摘要
为了提高海洋探测精度和范围,针对高频地波雷达(HFSWR)和自动识别系统(AIS)目标点迹的融合利用问题,该文提出一种基于JVC(Jonker-Volgenant-Castanon)的点迹分状态全局最优关联算法。首先,通过判断高频地波雷达和AIS点迹的径向速度,将点迹分为准静态目标和动态目标。接着,选取径向速度和点迹间的球面距离为特征参数,对不同状态下目标点迹分别进行径向速度和位置间球面距离粗关联。最后,使用相对距离比的平均值进行关联效果的评价,通过选择合适的关联门限参数,使用JVC算法实现高频地波雷达和AIS的点迹最优关联。实验结果表明:该算法在关联相同点迹对数的情况下,关联精度高于最近邻(NN)算法和Munkres关联法,关联用时少于最近邻算法和Munkres关联法。通过近3年内3组不同时刻实测目标点迹的验证,该算法可以满足关联的实用性和实时性要求。
Target point tracks optimal association algorithm with surface wave radar and automatic identification system [J].https://doi.org/10.11999/JEIT140678 Magsci [本文引用: 1] 摘要
为了提高海洋探测精度和范围,针对高频地波雷达(HFSWR)和自动识别系统(AIS)目标点迹的融合利用问题,该文提出一种基于JVC(Jonker-Volgenant-Castanon)的点迹分状态全局最优关联算法。首先,通过判断高频地波雷达和AIS点迹的径向速度,将点迹分为准静态目标和动态目标。接着,选取径向速度和点迹间的球面距离为特征参数,对不同状态下目标点迹分别进行径向速度和位置间球面距离粗关联。最后,使用相对距离比的平均值进行关联效果的评价,通过选择合适的关联门限参数,使用JVC算法实现高频地波雷达和AIS的点迹最优关联。实验结果表明:该算法在关联相同点迹对数的情况下,关联精度高于最近邻(NN)算法和Munkres关联法,关联用时少于最近邻算法和Munkres关联法。通过近3年内3组不同时刻实测目标点迹的验证,该算法可以满足关联的实用性和实时性要求。
|
| [56] |
近海监控系统中的多源信息融合算法研究[D] .The multi-source information fusion algorithm in the offing ocean monitoring and management system[D] . |
| [57] |
|

/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}