杨梦琳 , 李道春, 万志强, 严德, 王耀坤
, 李道春, 万志强, 严德, 王耀坤
北京航空航天大学航空科学与工程学院,北京 100083
YANG Menglin, LI Daochun, WAN Zhiqiang, YAN De, WANG Yaokun
通讯作者:
收稿日期: 2018-09-1
修回日期: 2019-03-7
网络出版日期: 2019-04-24
版权声明: 2019 《地球信息科学学报》编辑部 《地球信息科学学报》编辑部 所有
基金资助:
作者简介:
作者简介:杨梦琳(1994-),女,河北沧州人,硕士生,研究方向为飞行器设计。E-mail: zy1605327@buaa.edu.cn
展开
摘要
近年来,针对中国生态环境、洪涝灾害应急响应、国土安全监测等遥感观测任务,无人航空遥感手段需求越来越多。构建异构无人航空器遥感观测多任务集群系统是近几年的发展目标,为完成无人航空遥感生态建设,垂直起降无人机以其不受场地限制起降又可快速巡飞的特点,在多个领域发挥着越来越大的作用。本文主要研究内容包括国内垂直起降无人机发展现状调研、面向航空遥感应用市场的无人机分析及典型机型介绍、垂直起降无人机在遥感领域的应用场景及案例分析、垂直起降无人机在遥感领域的应用前景及发展趋势等。通过广泛调研及深入分析可知,目前垂直起降固定翼无人机正逐步取代多旋翼飞行器的主导地位;垂直起降无人机占据了遥感应用无人机80.47%的市场份额;动力多元化、系统智能化、布局多样化、尺寸小型化等是面向遥感应用的垂直起降无人机的发展方向。本文较为全面地阐述和剖析了面向遥感应用的垂直起降无人机的相关内容,为遥感航空无人机生态建设提供了参考与支撑。
关键词:
Abstract
In recent years, demand of unmanned aerial remote sensing tools is growing for ecological environment, flood disaster emergency response, land security monitoring and other remote sensing observation tasks. Building heterogeneous UAV remote sensing observation multi-task cluster system is the development goal in recent years. In order to complete the ecological construction of UAV remote sensing, vertical take-off and landing UAV plays an increasingly important role in many fields because of its characteristics of fast patrol and taking-off and landing without site restrictions. The main contents of this paper include the research on the development status of domestic vertical take-off and landing UAV, the analysis of UAVs for the aviation remote sensing application market and the introduction of typical UAV models, the application scenarios and case analysis of the vertical take-off and landing UAV in the field of remote sensing, and the application prospects and development trends of the vertical take-off and landing UAV in the field of remote sensing. Through extensive research and in-depth analysis, it is known that the vertical take-off and landing UAVs with fixed-wing are gradually replacing the dominant position of multi-rotor aircraft; vertical take-off and landing UAVs occupy 80.47% of the market share of remote sensing application drones; Diversified power, intelligent system, diversified layout, and small size are the development direction of vertical take-off and landing UAVs for remote sensing applications. This paper comprehensively expounded and analyzed the related content of vertical take-off and landing UAVs for remote sensing applications, and provides reference and support for the ecological construction of remote sensing aviation drones.
Keywords:
针对中国日益增长的遥感观测任务需求,遥感观测手段也正在日益丰富。其中,无人航空遥感是发展的重要方向之一,构建异构无人航空器遥感观测多任务集群系统是遥感观测的一个重要发展目标。无人机遥感是一种以无人机为平台,搭载遥感传感器,从而获取任务信息的热门技术,具有高时效、高时空分辨率、云下低空飞行、高机动性等优势。目前无人机遥感的主要应用包括重大突发 事件和自然灾害的应急响应、国土资源的数据采集与监测、各种地形信息的调查与测绘、农业植保、农业保险、环境保护、交通、能源、互联网和移动通讯等[1]。其中突发响应、地形勘探、农业应用等任务环境比较复杂,要求航空遥感平台具有起降便捷的特点。垂直起降无人机在起降方式上具有对地形要求低的特殊优势,在复杂环境遥感作业中具有不可替代的位置[3],其便捷起降与定点悬停特性可以增加无人机遥感作业的适用性、机动性和精确性,因此垂直起降无人机在遥感应用中具有重要意义。
目前,中国垂直起降无人机研究态势良好,大部分相关企业都在垂直起降无人机研制方面有所涉猎,但缺少对无人航空遥感领域的宏观设计与把控。无人机遥感技术可分为平台和载荷2大方面,涉及的关键技术多而广,造成遥感航空无人机生态发展不规范,没有一定的标准体系。相关研究中也缺少对相关市场上垂直起降无人飞行器的汇总调研结果,也没有对其发展趋势进行分析,特别是针对遥感观测方向的研究较少。因此,本文对市场相关具有代表性的产品进行了调研与归纳总结,并对面向遥感应用的垂直起降无人机未来发展趋势进行了分析,可以为遥感航空无人机生态建设提供参考与支持。
目前,由于无人机种类繁多,各国对无人机的分类方法和标准不尽相同。通常,按照起降方式的不同,可以将无人机分为滑跑起降无人机、垂直起降无人机、弹射无人机、手抛无人机、空投无人机、炮射无人机、潜射无人机等。其中,垂直起降无人机与其他无人机相比,具有对起降场地要求低,发射回收方便,机动性能好等优势,可以广泛应用于各种领域。近年来,随着无人机技术的飞速发展,垂直起降无人机逐渐成为研究热点。目前国内应用最广泛的3种垂直起降飞行器包括:无人直升机、多旋翼无人机、垂直起降固定翼无人机,相关对比如表1所示。
表1 3种垂直起降无人机优缺点对比
Tab. 1 Comparison of advantages and disadvantages of three kinds of vertical takeoff and landing UAVs
| 类型 | 优点 | 缺点 |
|---|---|---|
| 无人直升机 | 载重大、续航时间久 | 飞行速度低、系统复杂 |
| 多旋翼无人机 | 操作简便、容易入门 | 载重小、续航时间短 |
| 垂直起降固定翼无人机 | 载重较大、速度快 | 控制系统难度大 |
直升机的桨盘面积大,是当前空中悬停状况下动力转换效率最高的垂直起降飞行器。但随着直升机桨盘半径增大,其桨尖速度也随之增加[4,5,6]。桨尖速度是前飞速度和相对桨盘中心速度的矢量叠加,因此前行桨叶的桨尖速度比直升机前飞速度大得多,很容易进入跨声速区,而产生一些复杂问题:一方面,桨尖气流速度大,使得桨尖区域的动压和升力很大,因此在桨尖区域会产生强烈的桨尖涡;另一方面,桨尖处容易发生激波-附面层干扰现象,并导致阻力发散[7]。这2种现象对直升机的飞行性能都有极其严重的负面影响,因此直升机的平飞速度不宜过大。综上所述,直升机具有平飞速度低、飞行噪声和振动都很大、机械结构复杂、维护成本高等缺陷。
虽然直升机性能存在一定缺陷,但可以满足一定的任务需求。因此直升机的应用仍非常广泛,目前仍有很多单位正在研制。例如,中航工业研发的AV500轻型无人直升机系统可应用于海事监管、环境监测、搜索救援、农林防护、管道巡线、地质勘查、航空拍摄等民用领域[6](图1)。2018年6月在北京中关村举办的第九届中国无人机大会暨展览会上也展出了多架无人直升机(图2)。根据市场调研,北京、天津、沈阳、深圳、南京、郑州等城市都有公司针对直升机进行研发与使用。
图1 中航工业研发的AV-500无人直升机①(① 图片来自https://baike.baidu.com/item/AV500%E6%97%A0%E4%BA%BA%E7%9B%B4%E5%8D%87%E6%9C%BA/16171952?fr=aladdin。)
Fig. 1 AV-500 unmanned helicopter developed by AVIC
图2 第九届中国无人机大会暨展览会上展出的无人直升机②(② 图片来自
Fig. 2 Unmanned helicopters exhibited at the 9th China UAV Conference & Exhibition
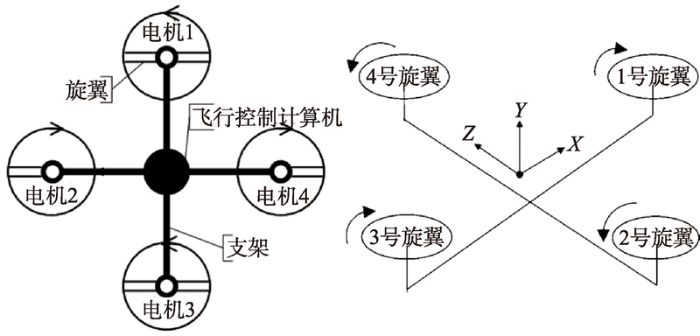
多旋翼无人机是一种具有3个及以上旋翼轴的无人机,机械结构简单,通过每个轴上的电动机,带动旋翼,产生升力(以四旋翼为例,如图3所示)。与直升机不同,多旋翼无人机不需要尾桨进行自身的力矩平衡。其总距固定,通过改变不同旋翼之间的相对转速,改变单轴推进力的大小,从而控制飞行器的运行轨迹。
图3 四旋翼飞行原理示意③(③ 图片来自
Fig. 3 Schematic diagram of the four-rotor flight principle
多旋翼无人机有着其他无人机无法比拟的优点:与固定翼无人机相比,可以垂直起降和定点悬停;与直升机相比,没有尾桨,结构简单,因此具备安全性高、使用成本和维护成本低的优点[8]。除此之外,多旋翼的稳定性强,操控容易,行动灵活,使其相对其他无人机来说有更大的市场空间。
多旋翼无人机包含多个桨盘,单个桨盘的半径一般较小,因此多旋翼的动力转换效率比直升机低,载重能力也相对较弱。如果要增加多旋翼无人机的最大载荷,需要在尺寸上做出很大扩展,同时对动力系统性能也会有更高要求,制造大型多旋翼性价比较低。另外,目前多旋翼大多使用电池提供动力,电池方便携带,但如果要求较长的续航时间,电池的尺寸和重量的增幅也会很大,因此一般多旋翼的续航能力低。
尽管多旋翼无人机续航和载重能力不突出,但其行动灵活,操控容易,在多个行业中得到了大量使用,目前是无人机中市场效应最好产品之一。国内的市场上,最具代表性的多旋翼无人机是大疆公司研发的产品[9],大疆的“御”系列、“晓”系列和“悟”系列都具有优良的视觉导航性能和航拍性能。另外,大疆公司也研发了植保无人机MG-1S[10]。除大疆公司以外,也有很多无人机公司生产多旋翼,以北京和深圳2个城市中研发多旋翼的公司最多,如北京博鹰通航科技有限公司的NY-M05、NY-M10植保无人机和XC-M11巡查无人机,天峋智能科技有限公司研发的“天蝠”多旋翼无人机(图4)。
图4 “天蝠”多旋翼④(④ 图片来自
Fig. 4 Vesper tilio multi-rotor
垂直起降固定翼无人机结合了垂直起降技术和固定翼无人机技术[3],兼备垂直起降能力和固定翼无人机良好的飞行性能,设计理念最初由二战结束之后美国、加拿大和欧洲的一些公司提出。
垂直起降固定翼飞行器还可以按照推力方向进一步细分为推力定向和推力换向2种形式。推力定向类即推力方向固定,一般为向上,美国的Fire Scout “火力侦察兵”是推力定向的垂直起降无人机;推力换向类无人机包括倾转旋翼式、矢量喷口式和倾转机身式等类型[11,12,13]。
垂直起降固定翼无人机的优点是起降环境适应性好,且能快速水平飞行,缺点是采用了两套产生升力的装置,因此每次使用一种升力产生装置时,另一种升力产生装置就会闲置,变成多余重量,而且还会产生一部分阻力[14,15,16,17,18]。这种固定翼与垂直起降技术结合的垂直起降无人机目前正处于研发阶段,验证机较多,市场上产品较少。经调研,一些公司、研究所和高校也在研发和生产,如零度智控公司研发的ZT-3V和ZT-30V两款垂直起降无人机、2018年7月北京国家会议中心举办的第六届军民融合技术装备博览会上展出的JY-2垂直起降固定翼无人机和JY-3多旋翼无人机,以及北京航空航天大学正在研制的“小海豚”改型号验证机(图5)。
无人机在遥感中的应用广泛,如重大突发事件和自然灾害的应急响应、国土资源的数据采集与监测、各种地形信息的调查与测绘、农业植保、农业保险、环境保护、交通、能源、互联网和移动通讯等。其中,重大突发事件和自然灾害紧急响应、国土资源环境调查与测绘和农业植保三大应用中,垂直起降无人机的作用是最明显的。
中国地域辽阔,地跨北温带、亚热带地区,有高原、平原、盆地、山区,地形复杂多变。在中国西南地区和山区,滑坡、泥石流等现象经常发生;在西北接沙漠和高原地区,多风沙风暴;在东南与西南边境,由于处于环太平洋地震带和西太平洋热带海域,地震与台风灾害频发。因此,中国是世界上自然灾害最多的国家之一,重大自然灾害给中国经济社会的发展和人民的财产安全带来了重大损失。在重大自然灾害面前,实现快速响应和紧急救援尤为重要。
当地震、洪水、泥石流等灾害发生时,地表情况相比之前会发生重大改变。特别是当通讯道路被阻,导致道路、信息等不畅时,会给之后的救灾行动造成巨大影响。垂直起降无人机对起降场地要求低,行动灵活,可以有效开展救援和灾后影像获取任务。当灾难发生,救援部队难以直接接触被困人员时,给被困人员投送水、食物、药品等必要物资就十分重要(图6)。例如,2008年汶川大地震时,成都军区抗震救灾部队的一架直升机,在执行投送物资、运送伤员的任务时,因局部气候变化,突遇低云大雾和强气流,在汶川县映秀镇附近失事,导致机组人员全部壮烈牺牲。无人机在运送物资方面人机分离,可以最大限度减少人员损失。因此垂直起降无人机在重大突发事件和自然灾害面前,获取信息的效率高,人员成本低,能够为抢险救灾提供有力支持;另外,2013年青岛经济开发区原油泄露事件。当地中石化黄淮输油管发生原油泄漏,部分原油沿雨水管道进入胶州湾,环保部紧急启动了遥感无人机,获取了高分辨率的溢油点附近海域图像,为事故处理提供了技术支持。此外,还有一些相关突发事件的应急处理都用到了遥感无人机,可见,遥感无人机研究是应对遥感需求的重要保障。
图6 无人机运送物资⑤(⑤ 图片来自
Fig. 6 Transporting suppliesby UAV
中国是土地资源大国,土地资源总量位于世界第三位,仅次于俄罗斯和加拿大,但同时又是人均占有资源量最小的国家之一,这一基本国情迫切需要非常精细及时的土地管理。测绘无人机已常态化应用在土地确权、基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设、应急救灾测绘等领域[19]。垂直起降无人机除具有垂直起降功能外,还具有定点悬停能力,可以对地势资源进行详细的调查和测绘。
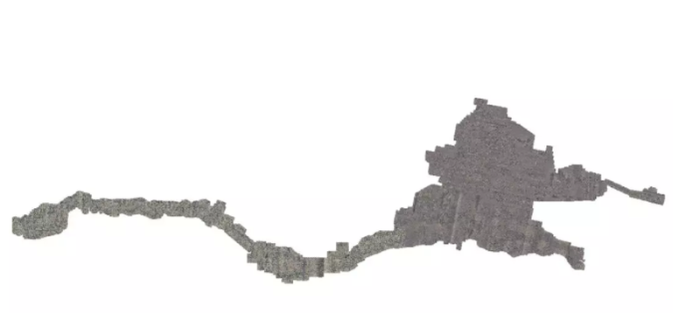
目前全国已有超过300家测绘单位拥有甲乙级航摄资质,使用无人机数量超过千架。此数据不包含无航摄资质的测绘公司、无人机服务公司及个人。据统计,应用在测绘行业的无人机总数超过2000架。成都纵横自动化技术有限公司研发的CW-20无人机(图7)累计在新疆塔克拉玛干沙漠绿洲处完成了超过10 000 km2的大比例尺航测任务,结果如图8所示。本次任务的执行得到了比以往更加清晰的观测图像,且比以往测绘方式更加高效。这是无人航空遥感应用领域的一个成功案例,展现了垂直起降无人机在遥感领域的重要作用与性能优势,说明了无人机在测绘任务方面的可行性与可靠性。
中国作为农业大国,拥有1.2亿hm2基本农田,每年需要大量人员从事农业植保作业,因此每年农药中毒的人员数量众多,农药残留和污染造成的病死人数至今尚无官方统计。同时,农村青壮年劳动力逐渐减少,人力成本日益增加。而植保无人机可远距离操作,避免了喷洒作业人员直接暴露于农药下的危险,保障了喷洒作业人员的安全;且植保无人机效率高,以一台起飞载重12 kg的无人机为例,日喷防面积在30~50 hm2。而依靠人力的喷雾器,每天喷防量不到1 hm2,即使是地面植保机械效率最高的高架喷雾器,也比无人机的效率低很多,因此植保无人机的应用极大地节省了劳动力资源。秦志伟[21]预计到2020年,中国植保无人机需求量大约是10万架,无人机植保从业人员的需求量大约是40万人。
垂直起降无人机旋翼产生的向下气流有助于增加雾流对作物的穿透性,防治效果好,远距离遥控操作,避免了喷洒作业人员暴露于农药之中,提高了喷洒作业安全性。
图8 塔克拉玛干沙漠绿洲1:2000正射影像结果⑥
Fig. 8 Taklimakan Desert Oasis 1:2000 orthophoto results
2018年6月在北京中关村举办的“尖兵之翼-第九届中国无人机大会暨展览会”上展出的河南三和航空工业有限公司研发的S50“小旋风”无人机(图9),其载重可达50 kg,药箱有效载荷50 L,有效喷幅大于10 m,正常飞行速度6~8 m/s,1个作业架次为8~10 min,可有效喷洒面积3~5 hm2,油耗仅为4.5~6.0 元/hm2。这种植保机的应用,相比于以往人力作业或小型飞机作业,使成本大大降低,效益显著,已经得到了广泛应用。但目前植保机绝大多数是多旋翼无人机,其续航时间还需要进一步提升。
图9 “小旋风”植保无人机⑦(⑦ 图片来自
Fig. 9 "Little Cyclone" plant protectionUAV
为更好地分析面向遥感应用的无人机的发展趋势和应用前景,本文调研了中国市场上的160多家无人机公司,并统计了700多种不同类型的无人机,这些无人机大多应用在电力巡线、地震勘测、边境巡视、管道巡检、洪涝灾情调查、森林火情监测、野生动物检测、植保、反恐、石油管线巡查、森林防火等多个行业,全面覆盖了各个遥感应用领域。
市场调研总体情况为:可以垂直起降的无人机有614种,其他方式起飞降落(包括手抛、滑跑、车载、弹射等方式)的有149种。可以垂直起飞降落的614种无人机中,包括88种传统直升机机型、52种垂直起降固定翼机型、464种多旋翼无人机,其余10种是其他类型的垂直起降无人机(包括飞艇、气球、异形概念无人机等),如表2所示。
表2 无人机机型及其市场占比调研统计结果
Tab. 2 Statistical results of Market Research on UAV models and their market share
| 无人机机型 | 数量/种 | 所占百分比/% | ||
|---|---|---|---|---|
| 可以垂直起降的无人机 | 传统直升机机型 | 88 | 11.53 | 80.47 |
| 多旋翼无人机 | 464 | 60.81 | ||
| 垂直起降固定翼无人机 | 52 | 6.82 | ||
| 其他 | 10 | 1.31 | ||
| 其他方式起降的无人机 | 149 | 19.53 | ||
| 总计 | 763 | 100.00 | ||
根据市场调研结果可以清晰地看出,垂直起降无人机在市场上占据比例已超过80%,这充分说明垂直起降无人机在商业应用广泛性上远远优于固定翼无人机。垂直起降无人机中,传统直升机机型由于价格高、技术复杂、使用难度大,只能在市场上占据10%左右的较小份额;由于多旋翼无人机技术近年来的迅猛发展,由于其技术成熟、使用方便、操作简单,深受大众喜爱,在市场上的地位远远超过其他类型的无人机。而由于垂直起降固定翼无人机兼备多旋翼和固定翼的优点,是市场上的新宠,但目前技术还不成熟,相关技术仍需进一步发展,因此这部分无人机在市场中所占据的比例较少。
无人直升机具有动力转换效率高的优点,目前其他两种垂直起降无人机在短时间内还不能替代。因此,在大型运输物资、抗震救灾、海上搜救等方面,传统无人直升机的位置不可替代。多旋翼无人机考虑到其续航能力和载重能力的不足,今后的发展应该会慢慢倾向于轻便的航拍、测绘、国土信息收集等方面。多旋翼无人机由于便携性,操控简单,飞行平稳等特点,还会在贴近日常生活的方方面面得到应用,如监测城市交通等。垂直起降固定翼无人机综合改善了传统无人机和固定翼无人机的缺点,可以垂直起降、定点悬停和快速巡飞[22,23,24]。因此,今后垂直起降固定翼无人机可用于大范围勘探侦查等领域。
垂直起降飞行器将来在遥感领域应用的发展趋势可概括为以下4点:
(1)动力多元化。续航能力对于无人机来说非常重要,航程和航时越长,作业能力越强,收集的信息越多。遥感领域的很多应用都对飞行器的续航能力要求很高。目前垂直起降无人机的动力包括电动、油动、油电混合几种方式,但仍有较大改进空间。将来发展应紧密结合燃料电池、液态燃料等新型能源的应用研究,进一步增强无人机的续航能力。
(2)系统智能化。在救灾、测绘等作业过程中,无人机难免会遇到突发情况,为增加无人机回收率,减少损失,无人机系统智能化必不可少。无人机智能化体现在应对任务自主学习能力、智能学习成果共享互联、突发情况快速解算等方面。遥感作业情况千变万化,不能通过穷尽法对所有情况预先设定,因此需要具有自主学习能力。另外,每架飞行器经历的任务状况不同,通过学习成果的共享互联,可以短时间内提高所有飞行器的任务效能。快速解算是智能化的基础,计算芯片的高性能和小型化是实现无人机智能化的关键,也是无人机在遇到突发情况时能够进行紧急解算的重要条件。因此,无人机系统的智能化能够有效提高任务效率,减少损失,是未来发展的重要趋势。
(3)布局多样化。飞行器的气动布局对于飞行的气动效率有很大影响,目前垂直起降无人机最常见的布局是多旋翼或者旋翼固定翼结合。旋翼还可以结合飞翼、联结翼、环形翼面等布局方式,进一步优化垂直起降无人机的气动布局,能够改进无人机的飞行性能,节省燃油,提高巡航速度,增加续航时间。
(4)尺寸小型化。垂直起降无人机的典型优点是对起降场地要求低,尺寸越小的无人机所需的起降空间越小,因此,垂直起降无人机如果要发扬优点,需要向小型化方向发展。小型化带来的好处除了所需起降场地空间小之外,还能增加无人机本身的灵活性、便携性,使垂直起降无人机在作业过程中资源占用少,效率更高。
垂直起降无人机近年来发展迅猛,在各方面应用都很广泛,尤其是在通用航空中发挥着无可替代的作用。本文对市场上典型的、具有代表性的垂直起降无人飞行器进行了归纳总结,并针对遥感应用,对垂直起降无人飞行器未来发展趋势进行了分析,可以得出以下结论:
(1)目前垂直起降无人飞行器主要有无人直升机、多旋翼飞行器及垂直起降固定翼无人机等类型。面向遥感的主要应用为重大突发事件和自然灾害的应急响应、国土资源环境调查与测绘及农业植保等。多旋翼飞行器目前应用最广,垂直起降固定翼无人机正逐步占据主导地位。
(2)针对中国市场上的160多家无人机公司,共700多种不同类型的无人机调研结果来看,垂直起降无人机占据了80.47%的市场份额,说明垂直起降无人机具有很高的研究与应用价值。
(3)垂直起降无人机还存在速度低、控制难、载重小等缺陷,面向遥感应用的垂直起降无人机未来应向动力多元化、系统智能化、布局多样化、尺寸小型化等方向发展,以适应(如矿井探采、极端地区基建等)更多、更复杂的遥感观测任务。
垂直起降无人机是未来无人机发展的重要方向之一,为了构建良好的发展生态,应针对遥感需求拟定一套发展路径和基本技术标准,使产品能够互通互联,但同时保护各自的技术特点,求同存异,才能更好更快地构建无人航空器遥感观测多任务集群系统。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
无人机遥感众创时代 [J]. |
| [3] |
垂直起降无人机总体方案分析及控制策略综合研究 [J].https://doi.org/10.3969/j.issn.1673-4599.2006.03.006 URL [本文引用: 2] 摘要
垂直起降无人机是垂直起降技术和无人机的结合体.它既有直升机的垂直起降和悬停能力,又具有固定翼飞机的速度快、航程远的特点.同时,它还具备一般无人机的基本特点,可满足执行特殊任务的需要.因无需考虑机载人员的因素,垂直起降无人机可以采用的垂直起降和总体设计方案更加灵活和多样.本文在分析现有各种垂直起降无人机方案的基础上,提出了"双旋翼尾坐式飞翼"布局,并在随后对其进行了详细参数确定和性能估算.最后,对其进行了控制策略的研究.
Configurations and control strategy for VTOL UAVs [J].https://doi.org/10.3969/j.issn.1673-4599.2006.03.006 URL [本文引用: 2] 摘要
垂直起降无人机是垂直起降技术和无人机的结合体.它既有直升机的垂直起降和悬停能力,又具有固定翼飞机的速度快、航程远的特点.同时,它还具备一般无人机的基本特点,可满足执行特殊任务的需要.因无需考虑机载人员的因素,垂直起降无人机可以采用的垂直起降和总体设计方案更加灵活和多样.本文在分析现有各种垂直起降无人机方案的基础上,提出了"双旋翼尾坐式飞翼"布局,并在随后对其进行了详细参数确定和性能估算.最后,对其进行了控制策略的研究.
|
| [4] |
直升机空气动力学 [M].Helicopter aerodynamics [M].Bei [J]. |
| [5] |
|
| [6] |
融合数字表面模型的无人机遥感影像城市土地利用分类 [J].
城市土地利用是城市生态学中的关键问题,深入了解城市的土地利用对合理规划城市功能分区、提升用地效益、促进区域经济与环境发展具有重要意义.因此,城市土地利用类型分类研究一直是城市规划学和城市地理学研究的核心内容之一.快速发展的无人机技术为城市土地利用分类提供了丰富的数据支撑,基于无人机遥感影像建立的数字表面模型(DSM)和数字正射影像(DOM)可以有效提高城市土地利用分类的精度.为了充分利用无人机遥感影像的丰富信息,本文提出了一种融合高分辨率DOM和DSM的城市土地利用分类方法.本文融合了DOM和DSM作为数据源.在面向对象分类方法的基础上,DSM分别被用于多尺度分割过程中像元融合的最终阈值和地物分类过程中的地物高度特征.该方法在天津市宝坻区的京津新城进行了验证,结果表明,相对于最初的多尺度分割方法,融合DSM后的多尺度分割方法的分割质量指数(QR)、过分割指数(OR)、欠分割指数(UR)和综合指数(CR)都有所降低,分割效果明显提高.优化后的面向对象分类方法,在分类精度上有所提高,尤其是道路、建筑物和其他建设用地.总体精度由85%提高到了87.25%,Kappa系数由0.79提高到0.82.由此可看出,优化后的面向对象分类方法可以更有效地进行城市土地利用分类.
Urban land use classification from UAV remote sensing images based on digital surface model [J].
城市土地利用是城市生态学中的关键问题,深入了解城市的土地利用对合理规划城市功能分区、提升用地效益、促进区域经济与环境发展具有重要意义.因此,城市土地利用类型分类研究一直是城市规划学和城市地理学研究的核心内容之一.快速发展的无人机技术为城市土地利用分类提供了丰富的数据支撑,基于无人机遥感影像建立的数字表面模型(DSM)和数字正射影像(DOM)可以有效提高城市土地利用分类的精度.为了充分利用无人机遥感影像的丰富信息,本文提出了一种融合高分辨率DOM和DSM的城市土地利用分类方法.本文融合了DOM和DSM作为数据源.在面向对象分类方法的基础上,DSM分别被用于多尺度分割过程中像元融合的最终阈值和地物分类过程中的地物高度特征.该方法在天津市宝坻区的京津新城进行了验证,结果表明,相对于最初的多尺度分割方法,融合DSM后的多尺度分割方法的分割质量指数(QR)、过分割指数(OR)、欠分割指数(UR)和综合指数(CR)都有所降低,分割效果明显提高.优化后的面向对象分类方法,在分类精度上有所提高,尤其是道路、建筑物和其他建设用地.总体精度由85%提高到了87.25%,Kappa系数由0.79提高到0.82.由此可看出,优化后的面向对象分类方法可以更有效地进行城市土地利用分类.
|
| [7] |
新型桨尖抑制旋翼跨声速特性的影响分析 [J].Analyses on inhibiting of transonic characteristics of rotor with new type blade-tip [J]. |
| [8] |
多旋翼无人机研究现状与发展趋势探讨 [J].Research status and development trend of multi-rotor UAV [J]. |
| [9] |
D [J].大疆创新企业战略分析 [J].Strategic analysis of D [J]. |
| [10] |
基于多旋翼大疆无人机的土地利用正射遥感影像的快速获取方法研究 [J].Study on rapidly obtaining land use remote sensing image using Dajiang unmanned aircraft [J]. |
| [11] |
旋翼固定翼复合式垂直起降飞行器概念设计研究 [J].https://doi.org/10.7527/S1000-6893.2015.0322 Magsci [本文引用: 1] 摘要
<p>近些年来垂直起降(VTOL)飞行器发展迅速,并获得了一些突破性进展,但仍有许多尚未解决的问题。结合旋翼机和固定翼飞机的优点,提出一种旋翼固定翼复合式飞行器布局方案,兼具优异的垂直起降性能及高速飞行能力,具有转换过渡稳定平滑、可控性强的特点。在该旋翼固定翼复合式布局中,特型旋翼可旋转以提供垂直升力,也可停转、锁定与固定式机翼保持平行,最终转换为固定翼面使得飞机转换为固定翼布局,并在机翼上布置矢量推力装置,实现高速飞行。概念设计研究围绕设计方法、特型旋翼、矢量推力系统等关键技术展开,并开展了平飞模式飞行特性、垂直起降模式飞行特性、航程、航时以及飞行操纵等性能的分析。通过试制小型原理验证机,并对各飞行状态及转换过渡飞行进行飞行试验,验证了该布局的可行性。结合实际算例展开分析计算,验证了该方案设计方法的准确性和实用性。</p>
Conceptual design of rotary wing and fixed wing compound VTOL aircraft [J].https://doi.org/10.7527/S1000-6893.2015.0322 Magsci [本文引用: 1] 摘要
<p>近些年来垂直起降(VTOL)飞行器发展迅速,并获得了一些突破性进展,但仍有许多尚未解决的问题。结合旋翼机和固定翼飞机的优点,提出一种旋翼固定翼复合式飞行器布局方案,兼具优异的垂直起降性能及高速飞行能力,具有转换过渡稳定平滑、可控性强的特点。在该旋翼固定翼复合式布局中,特型旋翼可旋转以提供垂直升力,也可停转、锁定与固定式机翼保持平行,最终转换为固定翼面使得飞机转换为固定翼布局,并在机翼上布置矢量推力装置,实现高速飞行。概念设计研究围绕设计方法、特型旋翼、矢量推力系统等关键技术展开,并开展了平飞模式飞行特性、垂直起降模式飞行特性、航程、航时以及飞行操纵等性能的分析。通过试制小型原理验证机,并对各飞行状态及转换过渡飞行进行飞行试验,验证了该布局的可行性。结合实际算例展开分析计算,验证了该方案设计方法的准确性和实用性。</p>
|
| [12] |
旋翼固定翼复合式垂直起降无人飞行器总体设计 [D].Conceptual design of rotor and fixed wing combined VTOL UAV [D].Bei [J]. |
| [13] |
四旋翼垂直起降固定翼飞行器设计 [J].Four-rotor vertical take-off and landing fixed-wing aircraft design [J]. |
| [14] |
小型四旋翼飞行器动力学模型优化 [J].
重心偏移情况下以升力作为输入控制量建立的小型四旋翼飞行器动力学模型结构复杂、控制通道耦合,必须通过更换模型参数适应重心变化来保证姿态稳定。研究了重心偏移对小型四旋翼飞行器飞行姿态的影响,提出一种适用于重心偏移情况的小型四旋翼飞行器动力学模型建立方法,以转矩作为输入控制量,实现了模型中各通道的解耦,模型结构简单,便于仿真验证和控制。对比分析了以升力作为输入控制量和以转矩作为输入控制量所建立的两种模型,并设计相应的PID控制器对系统响应特性进行仿真分析,结果表明,此优化方案在重心偏移情况下,可直接调整输入量适应重心变化保证姿态稳定,对偏移量的补偿更佳准确有效,更具优越性和适用性。
Model optimization of small quad-rotor in the case of center of mass offset [J].
重心偏移情况下以升力作为输入控制量建立的小型四旋翼飞行器动力学模型结构复杂、控制通道耦合,必须通过更换模型参数适应重心变化来保证姿态稳定。研究了重心偏移对小型四旋翼飞行器飞行姿态的影响,提出一种适用于重心偏移情况的小型四旋翼飞行器动力学模型建立方法,以转矩作为输入控制量,实现了模型中各通道的解耦,模型结构简单,便于仿真验证和控制。对比分析了以升力作为输入控制量和以转矩作为输入控制量所建立的两种模型,并设计相应的PID控制器对系统响应特性进行仿真分析,结果表明,此优化方案在重心偏移情况下,可直接调整输入量适应重心变化保证姿态稳定,对偏移量的补偿更佳准确有效,更具优越性和适用性。
|
| [15] |
复合式直升机前飞状态旋翼-机翼干扰计算分析 [J].Rotor-wing interaction analysis of a compound helicopterin forward flight [J]. |
| [16] |
新概念旋转机翼飞机旋翼技术研究 [D].Research on rotor technology of new concept rotor/wing aircraft [D]. Xi'an: |
| [17] |
NASA Puffin Electric Tailsitter VTOL Concept [C] |
| [18] |
垂直起降无人机技术发展现状与展望 [J].Development status and prospect of vertical landing and unmanned aerial vehicle technology [J]. |
| [19] |
无人机遥感在生态学中的应用进展 [J].
无人机与遥感技术的结合,即无人机遥感。与传统的以卫星和有人机遥感相比,无人机遥感具有高时效、高时空分辨率、云下低空飞行、高机动性等优势,是传统卫星和有人机遥感手段所无法比拟的。这些优点使得无人机在生态学和保护生物学等领域获得迅速发展。首先对无人机遥感技术的发展历程、系统组成、分类与选型、应用优势等进行了介绍。在此基础上,对无人机在生态学中的应用案例进行了总结,内容涉及生境监测、植物物候调查、动物监测等方面。最后通过比较国内外相关领域的研究进展对无人机生态学存在的问题(技术门槛较高和法律法规不完善等)和潜在应用前景进行了探讨。;Unmanned Aerial Vehicles (UAV or drone) equipped with sensors have been recently emerging as a new platform for remote sensing. Compared with satellite and airborne remote sensing techniques, drones can fly at low altitudes and at slow speeds, allowing them to take ultra-high spatial resolution imagery as frequently as needed. Owing to the above advantages, drones have been rapidly applied in ecology and conservation biology. In this review, we first briefly introduced the history of drone technology, the composition and classification of the drone platform, and its advantages in different research fields. Then, we provided an overall review of recent progress in drone ecology, and other research fields, such as habitat monitoring, plant phenology surveys, and animal monitoring. Finally, after analyzing the current status of this emerging field, we discussed the limitations of drone imagery analysis and regulations, and potential application prospects.
Unmanned Aerial Vehicle remote sensing in ecology: Advances and prospects .
无人机与遥感技术的结合,即无人机遥感。与传统的以卫星和有人机遥感相比,无人机遥感具有高时效、高时空分辨率、云下低空飞行、高机动性等优势,是传统卫星和有人机遥感手段所无法比拟的。这些优点使得无人机在生态学和保护生物学等领域获得迅速发展。首先对无人机遥感技术的发展历程、系统组成、分类与选型、应用优势等进行了介绍。在此基础上,对无人机在生态学中的应用案例进行了总结,内容涉及生境监测、植物物候调查、动物监测等方面。最后通过比较国内外相关领域的研究进展对无人机生态学存在的问题(技术门槛较高和法律法规不完善等)和潜在应用前景进行了探讨。;Unmanned Aerial Vehicles (UAV or drone) equipped with sensors have been recently emerging as a new platform for remote sensing. Compared with satellite and airborne remote sensing techniques, drones can fly at low altitudes and at slow speeds, allowing them to take ultra-high spatial resolution imagery as frequently as needed. Owing to the above advantages, drones have been rapidly applied in ecology and conservation biology. In this review, we first briefly introduced the history of drone technology, the composition and classification of the drone platform, and its advantages in different research fields. Then, we provided an overall review of recent progress in drone ecology, and other research fields, such as habitat monitoring, plant phenology surveys, and animal monitoring. Finally, after analyzing the current status of this emerging field, we discussed the limitations of drone imagery analysis and regulations, and potential application prospects.
|
| [20] |
|
| [21] |
年中国植保无人机需求量10万架 [N].China's plant protection drone demand 100 000 [N]. |
| [22] |
新型桨尖旋翼悬停气动性能试验及数值研究 [J].https://doi.org/10.3321/j.issn:1000-6893.2009.03.006 URL Magsci [本文引用: 1] 摘要
通过旋翼台试验和数值模拟方法对具有China Laboratory of Rotorcraft(CLOR)桨尖旋翼的悬停气动性能进行研究。为进行对比研究,共设计完成3副模型旋翼,分别为参考的矩形桨叶、常后掠桨尖的桨叶以及具有CLOR桨尖气动外形的桨叶。在模型旋翼台上进行这3副模型旋翼在不同转速、不同桨叶安装角条件下的旋翼拉力和扭矩测量;数值计算是采用一个基于Narier-Stokes方程/自由尾迹分析/全位势方程的旋翼流场求解的混合计算流体力学(CFD)方法进行的,计算结果与试验结果显示出较好的一致性。在此基础上,数值模拟了在旋翼试验台上很难开展的高速旋转试验状态。最后,根据试验和数值结果,对比分析具有CLOR新型桨尖旋翼与矩形桨尖以及常后掠桨尖旋翼的悬停气动性能,得出关于非常规气动外形桨尖对旋翼气动特性的影响机理,初步体现了CLOR桨尖旋翼具有良好的悬停性能。
Aerodynamic performance of rotor with new type blade-tip in hover based upon test and numerical investigations [J].https://doi.org/10.3321/j.issn:1000-6893.2009.03.006 URL Magsci [本文引用: 1] 摘要
通过旋翼台试验和数值模拟方法对具有China Laboratory of Rotorcraft(CLOR)桨尖旋翼的悬停气动性能进行研究。为进行对比研究,共设计完成3副模型旋翼,分别为参考的矩形桨叶、常后掠桨尖的桨叶以及具有CLOR桨尖气动外形的桨叶。在模型旋翼台上进行这3副模型旋翼在不同转速、不同桨叶安装角条件下的旋翼拉力和扭矩测量;数值计算是采用一个基于Narier-Stokes方程/自由尾迹分析/全位势方程的旋翼流场求解的混合计算流体力学(CFD)方法进行的,计算结果与试验结果显示出较好的一致性。在此基础上,数值模拟了在旋翼试验台上很难开展的高速旋转试验状态。最后,根据试验和数值结果,对比分析具有CLOR新型桨尖旋翼与矩形桨尖以及常后掠桨尖旋翼的悬停气动性能,得出关于非常规气动外形桨尖对旋翼气动特性的影响机理,初步体现了CLOR桨尖旋翼具有良好的悬停性能。
|
| [23] |
Aerodynamic shape optimization of hovering rotors using a discrete adjoint of the RANS equations [J]. |
| [24] |
Robust control of PVTOL aircraft with a nonlinear optimal control solution [J]. |

/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}