1 引言
近年来,小面积精准遥感对旋翼无人机需求越来越大。一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响。测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构。
目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题。文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广。② 基于学习的控制方法。文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用。③ 线性控制方法。文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现。文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的。④ 基于模型的非线性控制方法。文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强。例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想。
本文针对四旋翼飞行器的控制特性,设计一种基于滑模和ESO的四旋翼飞行器姿态控制算法。为了实现该算法,首先设计了一系列实验来获取模型参数,然后利用滑模控制实现对四旋翼3个姿态角回路的控制,并改善了滑模控制中存在的颤振现象,最后利用ESO实现对系统总扰的实时估计,并将其与滑模控制结合,对控制输出进行实时干扰补偿。仿真结果表明该控制器在实现四旋翼姿态稳定的同时,对姿态角指令具有良好的跟踪性能,且相对于普通的滑模控制具有更强的抗干扰能力。
2 四旋翼无人机建模及改进姿态控制 器框架
2.1 四旋翼无人机建模过程
(1)运动学和动力学方程的建立
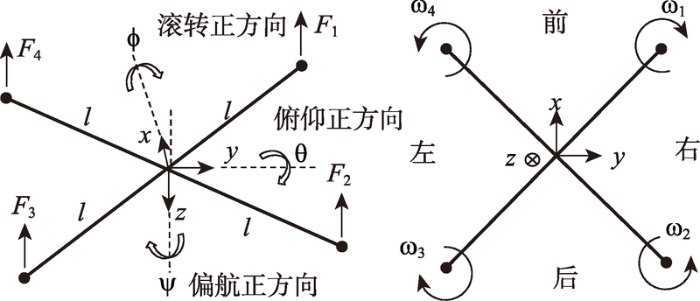
选取本体坐标系描述四旋翼飞行器的姿态运动,坐标原点与机体重心重合。四旋翼的结构类型为”X”型,其具体的系统结构和受力情况如图1 所示。
图1 四旋翼系统结构与受力
Fig. 1 Four-rotor system structure and force diagram
根据文献[22 ],将四旋翼视为刚体,忽略旋转运动产生的陀螺效应,得到的四旋翼飞行器姿态非线性运动方程为:
ϕ ˙ = p + q sin ϕ tan θ + r cos ϕ tan θ θ ˙ = q cos ϕ - r sin ϕ ψ ˙ = sec θ ( q sin ϕ + r cos ϕ )
式中: ϕ θ ψ p q r ω x y z p ˙ = qr J y - J z + τ ϕ ∙ 1 J x , q ˙ = pr J z - J x + τ θ ∙ 1 J y , r ˙ = [ pq ( J x - J y ) + τ ψ ] ∙ 1 / J z τ ϕ τ θ τ ψ J x J y J z x y z U = [ τ ϕ , τ θ , τ ψ ] ω i
U = τ ϕ τ θ τ ψ = - L c T - L c T L c T L c T L c T - L c T - L c T L c T - c Q c Q - c Q c Q ω 1 2 ω 2 2 ω 3 2 ω 4 2
式中: c T c Q L = l ∙ sin ( π / 4 ) l
(2)各个模块的模型建立与参数测量
本文结合国外开源项目Pixhawk搭建了四旋翼硬件平台,其整体结构图和飞控硬件板如图2 所示。
图2 四旋翼无人机结构和飞控硬件板
Fig. 2 Quad-rotor structure and flight control hardware board structure
实际测量的参数有转动惯量( J x J y J z 、 c T c Q 、 ( T )
四旋翼整体的转动惯量的获取步骤为:
① 将四旋翼飞行器分成一个个独立元件,并将每个独立元件简化成具有常值密度的几何形状。
② 测量出每个元件的尺寸和质量。
③ 利用平行轴定理来推导每个元件分别对x ,y ,z 轴的转动惯量大小。
④ 求出每个元件对每个轴的转动惯量大小总和,以此得到整个四旋翼飞行器的转动惯量。
本文将整个四旋翼飞行器分为电机部分(圆柱体)、电调(薄平板)、中心部分(圆柱体)、机臂(长圆柱棒)4个部分,测量出每个部分所需要的尺寸大小,以推导出整体的转动惯量为: J x = J y = 0.0094 kg ∙ m 2 J z = 0.0178 kg ∙ m 2
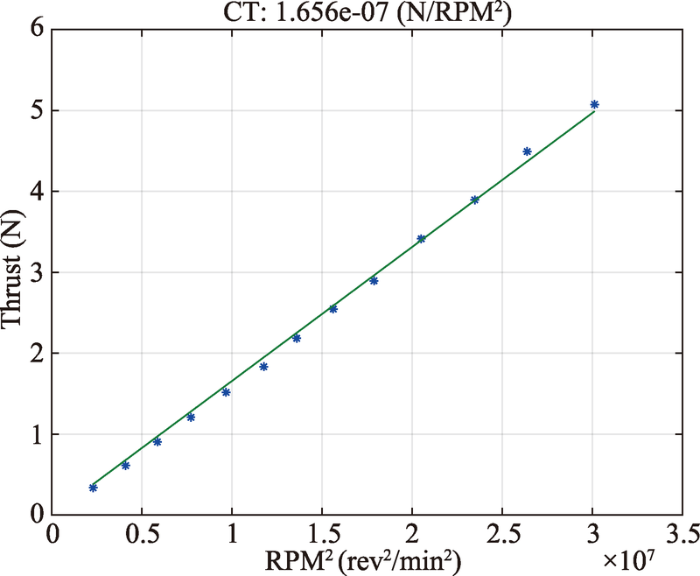
升力系数:对于单个推力系统,其模型可以简化为:
T = c T ω 2
式中: T x -y 轴向上; ω
为了得到推力系数,将电机的输入值PWM值由低到高给出13组测试值,用测速仪进行转速测量,用电子秤测出推力大小,然后根据实际数据进行拟合仿真,得出推力系数结果如图3 所示,其中推力系数 c T = 1.656 × 10 - 7 N / ( r / min ) 2
图3 单个螺旋桨的推力系数结果
Fig. 3 Asingle propeller thrust coefficient results
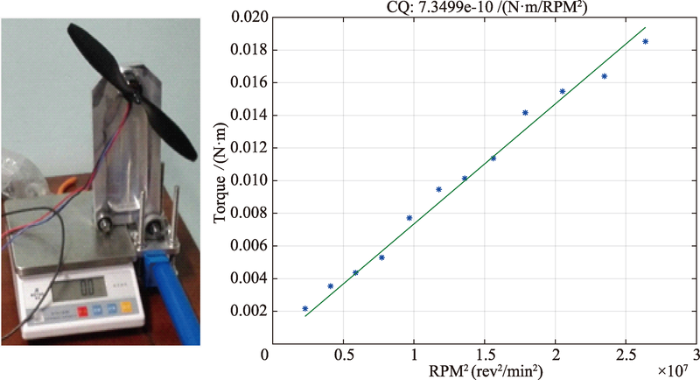
扭矩系数:该系数主要影响偏航运动,跟升力系数类似,其模型可以简化为:
Q = c Q ω 2
式中: Q 图4 所示,其中扭矩系数· c Q = 7.3499 × 10 - 10 N · m / ( r / min ) 2
图4 电机扭矩测试装置与单个螺旋桨的扭矩系数结果
Fig. 4 Motor torque test device and a single propeller torque factor result
电机时间常数:根据文献[21 ],整个电机动态模型简化为一阶惯性环节,而时间常数的求取是依据一阶惯性环节的阶跃响应时间经验公式(延迟时间大约为时间常数的4倍)得到,所用到的测量装置如图5 所示。
图5 电机时间常数测量装置
Fig. 5 Motor time constant measuring device
根据测量得到的延迟时间估算得到的时间常数 T
G ( s ) = 1 0.05 s + 1
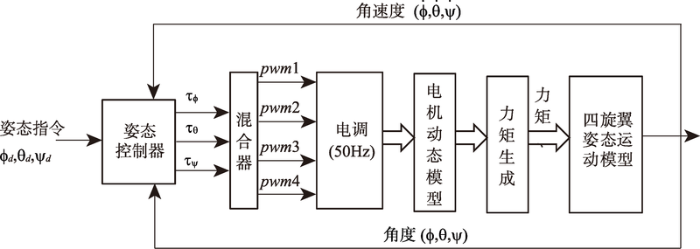
该传递函数能够复现转速设定值与真实转速之间的动态响应。至此,为了尽量靠近真实四旋翼硬件平台,整个四旋翼姿态控制结构如图6 所示。
图6 四旋翼姿态控制架构
Fig. 6 Four-rotor attitude control architecture
2.2 滑模控制方法的改进
利用滑模法合成控制器,可以使得四旋翼控制系统跟踪理想姿态指令,有关滑模法的推导和论述可以参考文献[21 ],在此不进行重复推导,从而可以得出3个姿态输出控制力矩为:
U 1 = τ φ = ( J z - J y ) x 4 x 6 - J x ( α 1 2 z 1 + k 1 sign ( s 2 ) + k 2 s 2 - x ¨ 1 d ) U 2 = τ θ = ( J x - J z ) x 2 x 6 - J y ( α 2 2 z 3 + k 3 sign ( s 3 ) + k 4 s 3 - x ¨ 3 d ) U 3 = τ ψ = ( J y - J x ) x 2 x 4 - J z ( α 3 2 z 5 + k 5 sign ( s 4 ) + k 6 s 4 - x ¨ 5 d )
式中: x 1 d , x 3 d , x 5 d x ˙ 1 d , x ˙ 3 d , x ˙ 5 d x ¨ 1 d , x ¨ 3 d , x ¨ 5 d k 1 ~ k 6 α 1 ~ α 3 s 2 ~ s 4 x 1 = φ , x 2 = x ˙ 1 = φ ˙ x 3 = θ , x 4 = x ˙ 3 = θ ˙ x 5 = ψ , x 6 = x ˙ 5 = ψ ˙ z 1 = x 1 d - x 1 , s 2 = x 2 - x ˙ 1 d - α 1 z 1 z 3 = x 3 d - x 3 , s 3 = x 4 - x ˙ 3 d - α 2 z 3 z 5 = x 5 d - x 5 , s 4 = x 6 - x ˙ 5 d - α 3 z 5
该传统滑模控制器中有一个非常明显的特征就是含有一个符号函数,是非连续的。则得到的控制指令也会是非连续的,因此在滑模面上会产生颤振现象,影响系统稳定性;为了避免颤振现象,用近似的连续饱和函数 sat ( s )
sat ( s ) = s / ( s + e ) e ∈ [ 0,1 ]
本文取e =0.5,即可得到改进的滑模控制器,将减缓颤振现象。
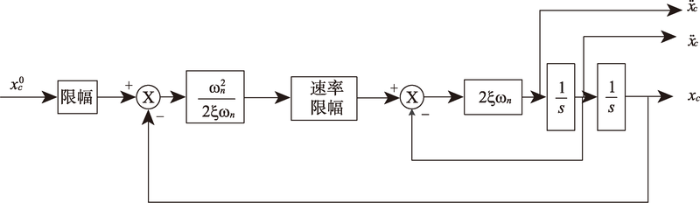
另外,构造滑模控制器需要知道输入指令理想值的一阶导数(如 x ˙ 1 d x ¨ 1 d
X c ( s ) X c 0 ( s ) = ω n 2 s 2 + 2 ξ ω n s + ω n 2
式中: X c 0 X c
x ¨ = - 2 ξ ω n x ˙ + ω n 2 ( x c 0 - x c )
实现该滤波器的具体结构如图7 所示。本文选取阻尼比 ξ = 0.8 ω n = 4.375
图7 二阶低通滤波器结构
Fig. 7 Second-order low-pass filter structure
2.3 四旋翼无人机的扩张状态观测器(ESO)构造
扩张状态观测器(ESO)是自抗扰控制器的一部分,自抗扰控制器首先由中国科学院系统科学研究所韩京清研究员提出[23 ] 。其核心就是利用ESO可以很好地动态估计系统的被扩张状态量(系统的加速度实时作用量);该过程只需要用到原对象的输入-输出信息;ESO能估计加速度实时作用量的根本原因在于只要系统满足可观测性条件,就有可能从系统输出信息中提炼其作用量。
观测出来的实时作用量相当于作用于积分器串联型系统的各种扰动作用(建模、未建模动态和外扰)总和。有了这个估计之后,再进行实时动态补偿,从而实现系统线性化。
以四旋翼的滚转角通道为例,说明ESO的具体结构实现。结合状态空间方程,将四旋翼的滚转角 ϕ
x ˙ 1 = x 2 x ˙ 2 = f 1 ( ϕ , ϕ ˙ , θ , θ ˙ , ψ , ψ ˙ ) + ω 2 ( t ) + b 0 U 1 y = x 1
式中: b 0 1 / J x ω 2 ( t ) f 1 ( … ) + ω 2 ( t ) a = f 1 ( … ) + ω 2 ( t ) x 3 = a
x ˙ 1 = x 2 x ˙ 2 = x 3 + b 0 U 1 x ˙ 3 = ω 0 y = x 1
然后对上述系统建立非线性扩张状态观测器:
e = z 1 - y z ˙ 1 = z 2 - β 01 e z ˙ 2 = z 3 - β 02 fal ( e , a 1 , h ) + b 0 U 1 z ˙ 3 = - β 03 fal ( e , a 2 , h )
其中,
fal ( e , a , δ ) = e a sign ( e ) e > δ e / δ - a e ≤ δ
选择适当的参数 β 01 β 02 β 03 a i ( i = 1,2 ) a 1 = 0.5 a 2 = 0.25 z i x i z 3 → x 3 = f ( … ) + ω ( t ) f ( … ) ω ( t ) z 3 a θ ψ
2.4 基于ESO的四旋翼滑模控制器架构改进
滑模控制是非线性方法实现鲁棒控制的一个简单途径,有效地解决了模型不准确情况下的控制稳定性和性能一致性的问题,但其并未对系统干扰进行实时观测估计,当干扰较大时,其控制效果并不理想。然而,ESO的核心就是实时估计总扰动,并进行动态补偿。其输入为系统输入和输出,输出为估计的状态量和被扩张状态量(总扰动),结构较为简单且容易与其他控制方法相结合。从而提高控制器的抗干扰能力。因此,将滑模控制与ESO相结合,能提高四旋翼姿态控制的鲁棒性和抗干扰能力。
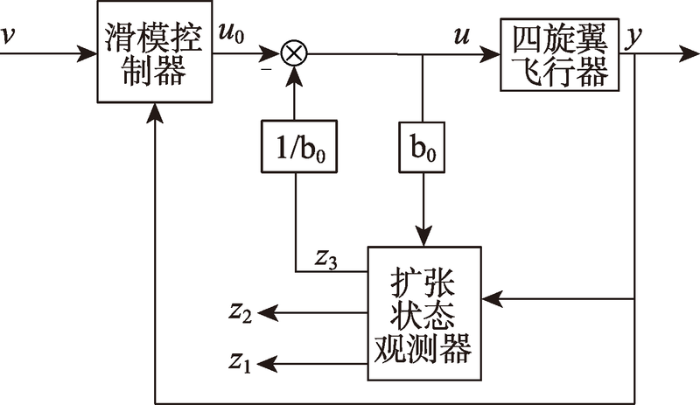
滑模控制和ESO结合,主要利用ESO中被扩张出来的状态量 z 3 z 3 图8 所示。
图8 滑模控制与ESO结合架构u 0 b 0 1 / J x 1 / J y u
Fig. 8 Sliding mode control combined with ESO structure
至此,结合式子(6)、(7)、(11)、(12),以滚转角 ϕ
e = z 1 ϕ - x 1 z ˙ 1 ϕ = z 2 ϕ - β 01 e z ˙ 2 ϕ = z 3 ϕ - β 02 fal ( e , 0.5 , h ) + ( 1 / J x ) U 1 z ˙ 3 ϕ = - β 03 fal ( e , 0.25 , h ) U 1 = ( J z - J y ) x 4 x 6 - J x ( α 1 2 z 1 + k 1 sat ( s 2 ) + k 2 s 2 - x ¨ 1 d ) - J x z 3 ϕ
同理,可得到其他2个姿态回路的控制输出为:
U 2 = ( J x - J z ) x 2 x 6 - J y ( α 2 2 z 3 + k 3 sat ( s 3 ) + k 4 s 3 - x ¨ 3 d ) - J y z 3 θ
U 3 = ( J y - J x ) x 2 x 4 - J z ( α 3 2 z 5 + k 5 sat ( s 4 ) + k 6 s 4 - x ¨ 5 d ) - J z z 3 ψ
式中: z 3 ϕ z 3 θ z 3 ψ
3 算法仿真与实验结果分析
3.1 仿真结果
为了验证本文所设计的控制器及其抗干扰效果,设定四旋翼飞行器的姿态初始值为( ϕ θ ψ 30 ° - 45 ° - 15 ° t ϕ d θ d ψ d 0 ° t ϕ d θ d ψ d 10 ° t ϕ d θ d ψ d sin ( t ) t N ∙ m t N ∙ m
滑模控制器部分的参数通过调试取 α 1 α 2 α 3 k 1 k 3 k 5 k 2 k 4 k 6 23 ], h β 01 β 02 β 03 h β 01 β 02 β 03 β 01 β 02 β 03
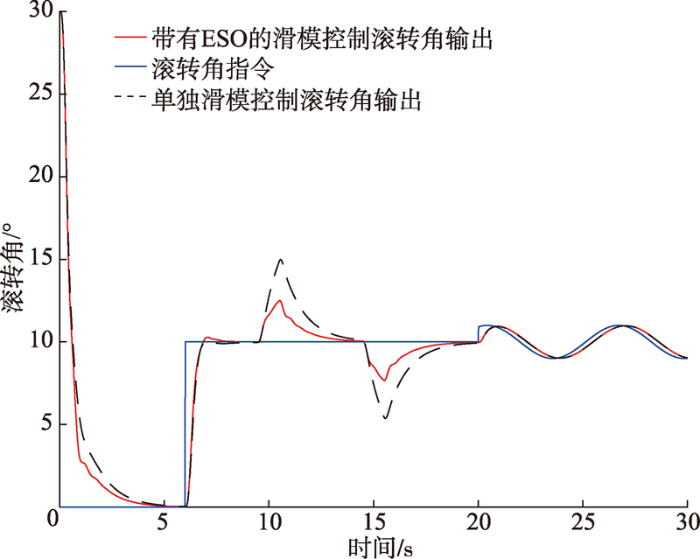
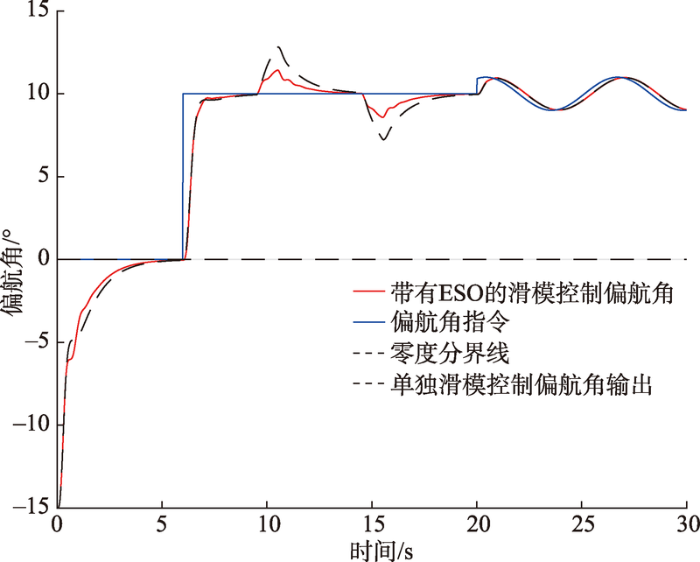
为了更好地说明本控制器的优越性,在相同初始条件、跟踪指令和外部干扰的情况下,将与单独滑模控制器的结果进行对比,如图9 -图11 所示。
图9 四旋翼滚转角响应曲线对比
Fig. 9 Comparison of the four-rotor roll angle response curve
图10 四旋翼俯仰角响应曲线对比
Fig. 10 Comparison of the four-rotor pitch angle response curve
图11 四旋翼偏航角响应曲线对比
Fig. 11 Comparison of four-rotor yaw angle response curves
图9 -图11 为四旋翼飞行器姿态控制各回路的仿真曲线对比图,是单独滑模控制和带有ESO的滑模控制的对比。从图中可看出,整个过程中,2种控制方法都能使四旋翼姿态角快速响应并跟踪姿态指令;但是,在9.5 s< t t 图9 和图11 可看出,带有ESO的滑模控制下,滚转角和偏航角响应时间更短。
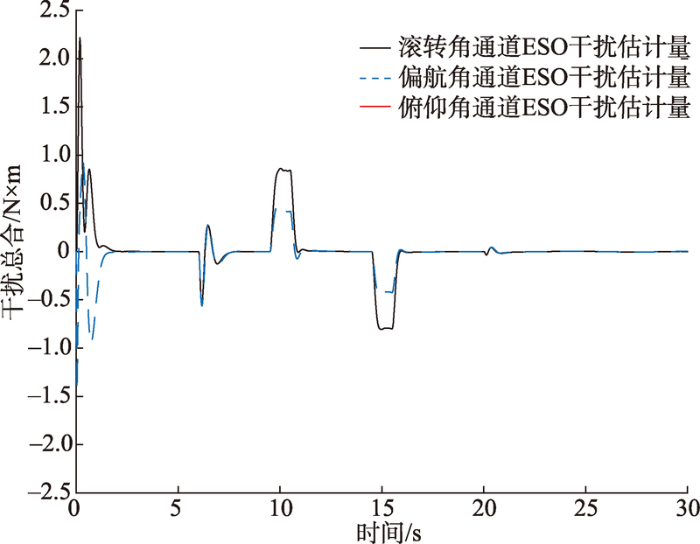
图12 为姿态各回路ESO干扰估计量图。当快速响应跟踪指令和受到外部干扰时,ESO的值不为零,而其他时间段为零,表明其能够实时估计出扰动总和。
图12 姿态各回路ESO干扰估计量
Fig. 12 ESO interference estimator for each loop of the pose
3.2 试飞结果
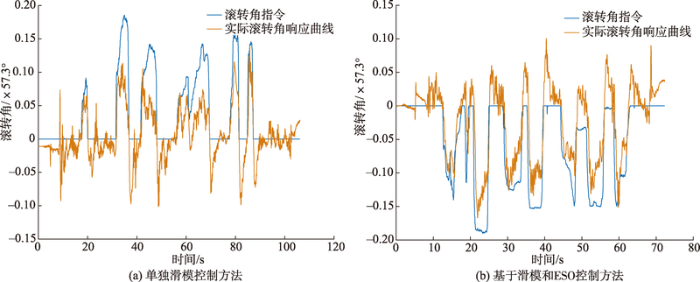
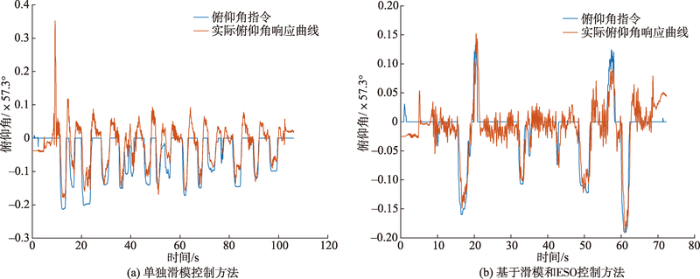
整个四旋翼硬件平台在室外进行等高模式试飞,其能稳定在一个指定高度,同时姿态控制使用了本文设计的控制器,由遥控器给出姿态指令。同样为了更好说明本控制器的优越性,将在滚转角回路和俯仰角回路与单独滑膜控制器的试飞结果进行对比。此外,为了更好地说明本控制器的抗干扰性,试飞中给这2个姿态角回路分别挂载108 g的物体,作为施加的外部干扰力矩,并进行结果对比。实际的结果图如图13 -图15 所示.
图13 2种控制方法的滚转角实际响应曲线对比
Fig. 13 Comparison of actual roll angles of the two control methods
图14 2种控制方法的俯仰角实际响应曲线对比
Fig. 14 Comparison of the actual curves of the pitch angles of the two control methods
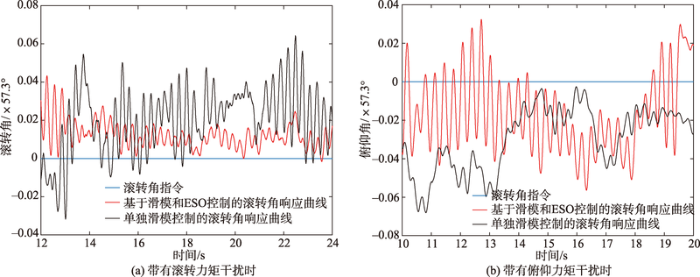
图15 外扰下的2种控制方法姿态角实际曲线对比
Fig. 15 Comparison of the actual curve of the attitude angles of the two control methods under external disturbance
图13 和图14 分别为2种控制方法下的滚转角和俯仰角实际曲线对比图。由图可看出,单独滑膜控制时,滚转角实际跟踪误差最大达到5.5 ° ± 5.7 ° ° ± 5.1 ° ± 5.7 ° ° ± 3 °
图15 为外扰力矩下2种控制方法的姿态角实际曲线对比图。选取滚转力矩干扰情况下,16~20 s的部分数据如表1 ,可以看出在常值滚转力矩干扰下,基于滑模和ESO控制的滚转角曲线震动明显较小,且震动范围能维持在 1.2 °
4 结论
为了获得较为精准的四旋翼仿真模型,本文设计并进行了一系列硬件实验,通过实验数据分析建模拟合得到准确的模型参数。利用基于滑模和ESO的控制算法实现对四旋翼飞行器姿态的高品质控制,并对系统总扰动(包括建模、未建模动态和外扰)实现了精确的估计。通过仿真和实际试飞验证对比表明,基于滑模和ESO的姿态控制器能够使跟踪误差减少约20%,在有外界干扰下,悬停时姿态角度波动幅度减少约50%,具有更强的抗干扰优势。
本文所设计的一系列获取模型参数的实验方法,实现较简单且实用,为其他获取模型参数的实验提供了一定参考价值。同时,本文设计的基于滑模控制和扩张状态观测器(ESO)的结合算法,实现难度小,对硬件系统要求较低,且ESO易于与其他控制方法相结合,实现对系统总扰动的估计,增强系统的跟踪能力和抗干扰能力,因此具有实际应用的价值。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
Sergei L Markus H Mark W Mueller et al .A platform for aerial robotics research and demonstration: The flying machine arena
[J]. Mechanics , 2014 ,24 :41 -54 .
https://doi.org/10.1016/j.mechatronics.2013.11.006
URL
[本文引用: 1]
摘要
The Flying Machine Arena is a platform for experiments and demonstrations with fleets of small flying vehicles. It utilizes a distributed, modular architecture linked by robust communication layers. An estimation and control framework along with built-in system protection components enable prototyping of new control systems concepts and implementation of novel demonstrations. More recently, a mobile version has been featured at several eminent public events. We describe the architecture of the Arena from the viewpoint of system robustness and its capability as a dual-purpose research and demonstration platform.
[2]
Paparazzi Community Balazs G Open source autopilot for academic research-the paparazzi system
[C]. American control conference (ACC), Washington , 2013 ,6 :1478 -1481 .
[本文引用: 1]
[3]
By T T Korbinian S Philipp L et al .Toward a fully autonomous uav-research platform for indoor and outdoor urban search and rescue
[J]. IEEE Robotics&Automation Magazine , 2012 ,12 :46 -56 .
[本文引用: 1]
[4]
晏磊 ,吕书强 ,赵红颖 等 .无人机航空遥感系统关键技术研究
[J].武汉大学学报(工学版) ,2004 ,37 (6 ):67 -70 .
https://doi.org/10.3969/j.issn.1671-8844.2004.06.017
URL
[本文引用: 1]
摘要
简要分析了在我国发展无人机航空遥感系统的必要性和可行性,针对我国某型民用无人机,设计了无人机航空遥感信息平台的总体技术框架. 在此基础上,对构建无人机航空遥感信息平台所涉及的关键技术进行了分析. 指出高精度的组合导航、不同遥感传感器设备的集成、遥感数据机上处理与压缩以及遥感数据近实时传输等是实现无人机航空遥感信息平台的关键技术.
[Yan L Lv S Q Zhao H Y et al .Research on key technologies of UAV aerial remote sensing system
[J]. Journal of Wuhan University (Engineering Science) , 2004 ,37 (6 ):67 -70 ]
https://doi.org/10.3969/j.issn.1671-8844.2004.06.017
URL
[本文引用: 1]
摘要
简要分析了在我国发展无人机航空遥感系统的必要性和可行性,针对我国某型民用无人机,设计了无人机航空遥感信息平台的总体技术框架. 在此基础上,对构建无人机航空遥感信息平台所涉及的关键技术进行了分析. 指出高精度的组合导航、不同遥感传感器设备的集成、遥感数据机上处理与压缩以及遥感数据近实时传输等是实现无人机航空遥感信息平台的关键技术.
[5]
Yang P Wang Z Zhang W et al .Depth profile measurement with lenslet images of the plenoptic camera
[J]. Optical Engineering , 2018 ,57 (3 ):033106 .
[本文引用: 1]
[6]
王万国 ,田兵 ,刘越 ,等 .基于RCNN的无人机巡检图像电力小部件识别研究
[J].地球信息科学学报 ,2017 ,19 (2 ):256 -263 .
[本文引用: 1]
[Wang W G Tian B Liu Y et al .Study on the electrical devices detection in UAV images based on region based convolutional neural networks
[J]. Journal of Geo-information Science , 2017 ,19 (2 ):256 -263 . ]
[本文引用: 1]
[7]
廖小罕 ,周成虎 ,苏奋振 ,等 .无人机遥感众创时代
[J].地球信息科学学报 ,2016 ,18 (11 ):1439 -1447 .
URL
[本文引用: 1]
[Liao X H Zhou C H Su F Z et al .The mass innovation era of UAV remote sensing
[J]. Journal of Geo-information Science , 2016 ,18 (11 ):1439 -1447 . ]
URL
[本文引用: 1]
[8]
Prouty R W. Helicopter performance,stability and control [M]. Florida : Krieger Publishing Company , 1995 :93 -94 .
[本文引用: 1]
[9]
Swee K P Chen X C Ben M C et al .Design and mathematical modeling of a 4-standard-propeller (4SP) quadrotor
[C].Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing , 2012 ,7 :3270 -3275 .
[本文引用: 1]
[10]
Kendoul F Yu , Nonami , et al .Guidance and nonlinear control system for autonomous flight of mini rotorcraft unmanned aerial vehicles
[J]. Journal of Field Robotics , 2010 ,27 (3 ):311 -334 .
[本文引用: 1]
[11]
Santos M Lopez V Morata F Intelligent fuzzy controller of a quadrotor
[C]. Proceedings of 2010 IEEE International Conference on Intelligent Systems and Knowledge Engineering (ISKE) , 2010 :141 -146 .
[本文引用: 1]
[12]
王冬来 ,吕强 ,刘峰 .基于<inline-formula><mml:math xmlns:mml="http://www.w3.org/1998/Math/MathML" id="Mml166-1560-8999-21-4-532"><mml:msub><mml:mrow><mml:mi>L</mml:mi></mml:mrow><mml:mrow><mml:mn>1</mml:mn></mml:mrow></mml:msub></mml:math></inline-formula>神经网络自适应算法的飞行器姿态控制
[J].计算机工程与设计 ,2012 ,33 (12 ):4758 -4761 .
[本文引用: 1]
[Wang D L Lv Q Liu F An attitude control of aircraft based on L1 neural network adaptive algorithm
[J]. Computer Engineering and Design , 2012 ,33 (12 ):4758 -4761 . ]
[本文引用: 1]
[13]
Nicol C Macnab C J B Ramirez S A Robust neural network control of a quadrotor helicopter
[C]. Proceedings of the Canadian Conference on Electrical and Computer Engineering , 2008 :1233 -1237 .
[本文引用: 1]
[14]
Salih A L Moghavvemi M Mohamed H A F et al . Flight PID controller design for a UAV quadrotor
[J]. Scientific Research and Essays , 2010 ,5 (23 ):3660 -3667 .
[本文引用: 1]
[15]
Sarnir B Andre N Roland S PID vs LQ control techniques applied to an indoor micro quadrotor
[C].Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Japan , 2004 ,10 :2451 -2456 .
[本文引用: 1]
[16]
李杰 ,齐晓慧 ,韩帅涛 .基于自抗扰技术的四旋翼姿态解耦控制方法
[J].电光与控制 ,2013 ,20 (3 ):44 -48 .
https://doi.org/10.3969/j.issn.1671-637X.2013.03.010
URL
[本文引用: 1]
摘要
针对小型四旋翼飞行器姿态控制问题, 基于姿态非线性耦合数学模型, 设计了一种自抗扰姿态控制器。引入自抗扰控制技术, 介绍了自抗扰控制器结构, 包括安排过渡过程, 扩张状态观测器以及非线性状态误差反馈。针对模型非线性耦合特点, 介绍了多变量系统的自抗扰解耦控制原理, 并设计了一种自抗扰姿态解耦控制器。基于Simulink搭建仿真模型进行了仿真。参数整定及仿真结果表明, 所设计自抗扰控制器具有强鲁棒性、抗干扰性, 系统具有良好的动态性能和稳态性能, 对非线性耦合系统能有效地控制。
[Li J Qi X H Han S T A four-rotor attitude decoupling control method based on active disturbance rejection technology
[J]. Electronics Optics & Control , 2013 ,20 (3 ):44 -48 ]
https://doi.org/10.3969/j.issn.1671-637X.2013.03.010
URL
[本文引用: 1]
摘要
针对小型四旋翼飞行器姿态控制问题, 基于姿态非线性耦合数学模型, 设计了一种自抗扰姿态控制器。引入自抗扰控制技术, 介绍了自抗扰控制器结构, 包括安排过渡过程, 扩张状态观测器以及非线性状态误差反馈。针对模型非线性耦合特点, 介绍了多变量系统的自抗扰解耦控制原理, 并设计了一种自抗扰姿态解耦控制器。基于Simulink搭建仿真模型进行了仿真。参数整定及仿真结果表明, 所设计自抗扰控制器具有强鲁棒性、抗干扰性, 系统具有良好的动态性能和稳态性能, 对非线性耦合系统能有效地控制。
[17]
张广昱 ,袁昌盛 .基于自抗扰理论的小型四旋翼飞行器姿态控制
[J].航空工程进展 ,2014 ,5 (3 ):338 -342 .
https://doi.org/10.3969/j.issn.1674-8190.2014.03.012
URL
[本文引用: 1]
摘要
针对四旋翼飞行器的强耦合性,非线性,易受外界干扰等控制难点,研究了利用自抗扰控制器对四旋翼飞行器进行姿态控制的技术问题。通过牛顿-欧拉方程建立了四旋翼飞行器动力学模型,将不确定性、耦合及参数摄动等干扰作为"总和干扰",利用扩张状态观测器进行估计并动态反馈补偿,再利用非线性反馈抑制补偿残差,建立了仿真模型。仿真结果表明:在存在模型参数摄动和外界扰动情况下,扩张状态观测器很好的实时估计和补偿了四旋翼飞行器的总和干扰,基于自抗扰的四旋翼飞行器姿态控制系统具有较好的动态品质、稳态精度以及较强的鲁棒性。
[Zhang G L Yuan C S Angular control of small quadrotor aircraft based on active disturbance rejection theory
[J]. Aeronautical Engineering Progress , 2014 ,5 (3 ):338 -342 . ]
https://doi.org/10.3969/j.issn.1674-8190.2014.03.012
URL
[本文引用: 1]
摘要
针对四旋翼飞行器的强耦合性,非线性,易受外界干扰等控制难点,研究了利用自抗扰控制器对四旋翼飞行器进行姿态控制的技术问题。通过牛顿-欧拉方程建立了四旋翼飞行器动力学模型,将不确定性、耦合及参数摄动等干扰作为"总和干扰",利用扩张状态观测器进行估计并动态反馈补偿,再利用非线性反馈抑制补偿残差,建立了仿真模型。仿真结果表明:在存在模型参数摄动和外界扰动情况下,扩张状态观测器很好的实时估计和补偿了四旋翼飞行器的总和干扰,基于自抗扰的四旋翼飞行器姿态控制系统具有较好的动态品质、稳态精度以及较强的鲁棒性。
[18]
杨立本 ,章卫国 ,黄得刚 .基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪
[J].北京航空航天大学学报 ,2015 ,41 (6 ):1026 -1033 .
https://doi.org/10.13700/j.bh.1001-5965.2014.0392
URL
Magsci
[本文引用: 1]
摘要
An attitude decoupling algorithm based on active disturbance rejection control (ADRC) was designed for underactuated quadrotor aircraft. The algorithm can overcome some shortcomings of traditional control method for underactuated quadrotor, such as strong coupling between system states, weak anti-interference ability and high sensitivity of tracking performance to modeling errors, etc. The state coupling was tracked and estimated by extended state observer (ESO), system interference can be estimated by ESO at the same time. The interference of the system includes internal and external disturbances. The nonlinear multiple-input multiple-output (MIMO) system was transformed into linear single-input single-output (SISO) system by dynamic feedback linearization. Then using the nonlinear feedback control law to achieve high quality control of the attitude system, and study the robust trajectory tracking problem of the aircraft based on the attitude decoupling control algorithm. The simulation results show that the above attitude control algorithm can improve the robustness of the trajectory tracking system. The algorithm does not rely on the accurate system model, reduces the difficulty of practical application, and has strong anti-interference capability and practical application value as well.
[Yang L B Zhang W G Huang D G Robust trajectory tracking of quadrotor based on ADRC attitude decoupling
[J]. Journal of Bei
[J].ng University of Aeronautics and Astics , 2015 ,41 (6 ):1026 -1033 ]
https://doi.org/10.13700/j.bh.1001-5965.2014.0392
URL
Magsci
[本文引用: 1]
摘要
An attitude decoupling algorithm based on active disturbance rejection control (ADRC) was designed for underactuated quadrotor aircraft. The algorithm can overcome some shortcomings of traditional control method for underactuated quadrotor, such as strong coupling between system states, weak anti-interference ability and high sensitivity of tracking performance to modeling errors, etc. The state coupling was tracked and estimated by extended state observer (ESO), system interference can be estimated by ESO at the same time. The interference of the system includes internal and external disturbances. The nonlinear multiple-input multiple-output (MIMO) system was transformed into linear single-input single-output (SISO) system by dynamic feedback linearization. Then using the nonlinear feedback control law to achieve high quality control of the attitude system, and study the robust trajectory tracking problem of the aircraft based on the attitude decoupling control algorithm. The simulation results show that the above attitude control algorithm can improve the robustness of the trajectory tracking system. The algorithm does not rely on the accurate system model, reduces the difficulty of practical application, and has strong anti-interference capability and practical application value as well.
[19]
Daewon L H J K Shankar S Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter
[J]. International Jurnal of Control, Automation and Systems , 2009 ,7 (3 ):419 -428 .
[本文引用: 1]
[20]
Tarek M Abdelaziz B ackstepping control for a quadrotor helicopter
[C].Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing , 2006 ,10 :3255 -3260 .
[本文引用: 1]
[21]
Samir B Roland S Backstepping and sliding-mode techniques applied to an indoor micro quadrotor
[C]. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Spain , 2005 ,4 :2247 -2252 .
[本文引用: 3]
[22]
Beard R W Quadrotor dynamics and control
[D]. Provo:Brigham Young University , 2008 :11 -18 .
[本文引用: 1]
[23]
韩京清 . 自抗扰控制技术
[J].前沿科学 ,2007 ,1 (1 ):24 -31 .
[本文引用: 2]
[HanJ Q Self-disturbance control technology
[J].Front Science , 2007 ,1 (1 ):24 -31 ]
[本文引用: 2]
A platform for aerial robotics research and demonstration: The flying machine arena
1
2014
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
Open source autopilot for academic research-the paparazzi system
1
2013
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
Toward a fully autonomous uav-research platform for indoor and outdoor urban search and rescue
1
2012
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
无人机航空遥感系统关键技术研究
1
2004
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
无人机航空遥感系统关键技术研究
1
2004
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
Depth profile measurement with lenslet images of the plenoptic camera
1
2018
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
基于RCNN的无人机巡检图像电力小部件识别研究
1
2017
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
基于RCNN的无人机巡检图像电力小部件识别研究
1
2017
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
无人机遥感众创时代
1
2016
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
无人机遥感众创时代
1
2016
... 近年来,小面积精准遥感对旋翼无人机需求越来越大.一个稳定可靠的旋翼机硬件通用平台[1 ,2 ,3 ] ,对于无人机遥感成像效果[4 ,5 ] 、电力图像巡检效果[6 ] 有着直接的影响.测绘遥感行业逐渐进入了无人机时代[7 ] ,而其中旋翼无人机的姿态控制是平台稳定可靠的关键基础技术,本文将对这一关键基础技术进行深入研究,提出一种新的姿态控制器架构. ...
1
1995
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Design and mathematical modeling of a 4-standard-propeller (4SP) quadrotor
1
2012
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Guidance and nonlinear control system for autonomous flight of mini rotorcraft unmanned aerial vehicles
1
2010
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Intelligent fuzzy controller of a quadrotor
1
2010
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于<inline-formula><mml:math xmlns:mml="http://www.w3.org/1998/Math/MathML" id="Mml166-1560-8999-21-4-532"><mml:msub><mml:mrow><mml:mi>L</mml:mi></mml:mrow><mml:mrow><mml:mn>1</mml:mn></mml:mrow></mml:msub></mml:math></inline-formula>神经网络自适应算法的飞行器姿态控制
1
2012
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于<inline-formula><mml:math xmlns:mml="http://www.w3.org/1998/Math/MathML" id="Mml166-1560-8999-21-4-532"><mml:msub><mml:mrow><mml:mi>L</mml:mi></mml:mrow><mml:mrow><mml:mn>1</mml:mn></mml:mrow></mml:msub></mml:math></inline-formula>神经网络自适应算法的飞行器姿态控制
1
2012
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Robust neural network control of a quadrotor helicopter
1
2008
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Flight PID controller design for a UAV quadrotor
1
2010
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
PID vs LQ control techniques applied to an indoor micro quadrotor
1
2004
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于自抗扰技术的四旋翼姿态解耦控制方法
1
2013
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于自抗扰技术的四旋翼姿态解耦控制方法
1
2013
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于自抗扰理论的小型四旋翼飞行器姿态控制
1
2014
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于自抗扰理论的小型四旋翼飞行器姿态控制
1
2014
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪
1
2015
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪
1
2015
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter
1
2009
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
ackstepping control for a quadrotor helicopter
1
2006
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
Backstepping and sliding-mode techniques applied to an indoor micro quadrotor
3
2005
... 目前针对四旋翼飞行器姿态控制的研究主要包括4个方面:① 四旋翼无人机动态建模问题.文献[8 ,9 ,10 ]分别研究了螺旋桨的挥舞现象及建模和四旋翼刚体运动模型,其中将四旋翼看作刚体,利用刚体动力学方程来建模是目前小型四旋翼飞行器建模的主流方法,但是很少有文献提供实际的模型参数测试方法,至于螺旋桨与空气动力学之间的关系则更复杂,需要更精准的仪器设备进行试验,不易实际推广.② 基于学习的控制方法.文献[11 ,12 ,13 ]分别基于模糊控制、神经网络自适应算法、鲁棒神经网络控制设计四旋翼飞行器的姿态控制器,这类控制器虽然不需要四旋翼的运动模型,但是需要大量的实验和飞行数据来训练系统,算法复杂且对硬件要求较高,且大部分研究停留在仿真阶段,没有得到实际应用.③ 线性控制方法.文献[14 ,15 ]分别基于PID、LQ控制方法设计四旋翼姿态控制器;该类线性控制器实现较为简单,但是当四旋翼飞行器脱离标称条件或者大范围机动时,其控制器性能会明显下降;同时,国内研究者开始将自抗扰控制方法应用于四旋翼飞行器,基于自抗扰理论设计了四旋翼飞行器姿态控制[16 ,17 ] ,其核心就是ESO能够实时估计系统总扰,但并未在硬件中得到实现.文献[18 ]在实现四旋翼姿态的自抗扰控制基础上,研究了其参数优化和轨迹跟踪问题,但是由于自抗扰控制本身来源于PID控制,基于误差调节而不依赖模型,实现简单,其能适应的飞行运动条件是有限的.④ 基于模型的非线性控制方法.文献[19 ,20 ,21 ]分别基于反馈线性化、反步法和滑模控制设计四旋翼控制器,这类控制方法需要依靠精确的模型,在能够得到模型参数的前提下,能使四旋翼控制性能和运动范围得到增强.例如,滑模控制具有较好的鲁棒性,但是由于这类控制器并未对系统干扰进行实时观测,当干扰较大时,其控制效果也并不理想. ...
... 电机时间常数:根据文献[21 ],整个电机动态模型简化为一阶惯性环节,而时间常数的求取是依据一阶惯性环节的阶跃响应时间经验公式(延迟时间大约为时间常数的4倍)得到,所用到的测量装置如图5 所示. ...
... 利用滑模法合成控制器,可以使得四旋翼控制系统跟踪理想姿态指令,有关滑模法的推导和论述可以参考文献[21 ],在此不进行重复推导,从而可以得出3个姿态输出控制力矩为: ...
Quadrotor dynamics and control
1
2008
... 根据文献[22 ],将四旋翼视为刚体,忽略旋转运动产生的陀螺效应,得到的四旋翼飞行器姿态非线性运动方程为: ...
自抗扰控制技术
2
2007
... 扩张状态观测器(ESO)是自抗扰控制器的一部分,自抗扰控制器首先由中国科学院系统科学研究所韩京清研究员提出[23 ] .其核心就是利用ESO可以很好地动态估计系统的被扩张状态量(系统的加速度实时作用量);该过程只需要用到原对象的输入-输出信息;ESO能估计加速度实时作用量的根本原因在于只要系统满足可观测性条件,就有可能从系统输出信息中提炼其作用量. ...
... 滑模控制器部分的参数通过调试取 α 1 α 2 α 3 k 1 k 3 k 5 k 2 k 4 k 6 23 ], h β 01 β 02 β 03 h β 01 β 02 β 03 β 01 β 02 β 03
自抗扰控制技术
2
2007
... 扩张状态观测器(ESO)是自抗扰控制器的一部分,自抗扰控制器首先由中国科学院系统科学研究所韩京清研究员提出[23 ] .其核心就是利用ESO可以很好地动态估计系统的被扩张状态量(系统的加速度实时作用量);该过程只需要用到原对象的输入-输出信息;ESO能估计加速度实时作用量的根本原因在于只要系统满足可观测性条件,就有可能从系统输出信息中提炼其作用量. ...
... 滑模控制器部分的参数通过调试取 α 1 α 2 α 3 k 1 k 3 k 5 k 2 k 4 k 6 23 ], h β 01 β 02 β 03 h β 01 β 02 β 03 β 01 β 02 β 03
 , 孙山林
, 孙山林


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}