1 引言
近几年,随着软件和硬件的不断发展,遥感数据获取(如无人机航空摄影、倾斜摄影、激光扫描、航天遥感等)取得了长足的进步;遥感数据应用除了制作传统的DEM、DOM、DLG产品,又增加了真正射、快拼影像图、三维数字建模、建筑单体化等新兴应用,这些应用对遥感数据处理的精度和速度、自动化程度等指标提出了更高的要求。
快速、高精度的获取点云是实现上述基于三维坐标的应用的基础。目前获取点云主要途径有 2种:由LiDAR、SAR等主动遥感方式直接获取点云;用摄影测量的办法由立体影像匹配生成点云。LiDAR是一种主动遥感技术,三维点云获取效率高,且不受日照、天气条件限制,但其获取的三维点云存在断裂线采集困难、干扰点去除不易以及规则目标如建筑物边界不能清晰判断等问题,导致后处理困难[1 ] 。而影像密集匹配生成的点云具有数据获取便捷、数据来源丰富、相比之下成本低等优点,尤其近年来国内无人机低空遥感发展迅速,搭载的绝大多数传感器是各种幅面的数码相机[2 ] ,因此利用无人机遥感影像密集匹配获取点云的代价远低于机载LiDAR点云,并且由于飞行高度低、影像分辨率高,与机载LiDAR点云相比获取的数据在边缘、纹理和特征线上的表现更加优异。
无论哪种方式获取的点云处理的基本环节都是将地面点分离出来,这一过程就是点云滤波。目前主流的点云滤波方法包括:基于数学形态学的点云滤波、基于坡度的点云滤波、基于曲面拟合的滤波算法、基于不规则三角网的滤波算法、基于分割的滤波算法等[3 ] ,这些滤波算法主要针对LiDAR点云,ISPRS对不同的滤波算法进行了对比认为,各种算法都具有不同的优势和短板,如三角网滤波算法计算量和复杂度大、曲面拟合算法滤波精度取决于种子点选取、基于坡度的滤波算法主要依赖初始坡度的设定等,多数滤波算法对特定地形可以得到理想的效果,但对于多种复杂地形滤波效果不佳。对本文讨论的密集匹配三维点云而言,目前的滤波算法存在3个不足:① 算法对密集匹配的三维点云的超大数据量缺乏针对性研究;② 算法并没有利用影像的颜色信息;③ 算法对参数依赖较高,普遍对单一地形滤波效果较好,但对复杂地形(如依山而建的城镇)点云滤波效果差强人意。如果需要达到满意的滤波效果,在实际作业中甚至需要进行人工按地形切块分别进行滤波,过程操作繁琐既影响工作效率也容易出错。
因此,对影像高密匹配尤其是混合复杂地形的三维点云而言,既能保持滤波精度又能保证数据处理效率尤为重要。本文利用深度学习对遥感影像进行地物分类的成果,充分利用遥感影像的色彩信息,对渐进形态学点云滤波进行改进,并按深度学习对地物分类结果对不同地形的区域进行特征分割,然后按照识别的特征完成自适应参数滤波。在研究的过程中,与布料模拟滤波进行了滤波效果和效率的对比实验,2种滤波结果与人工编辑过的数据作比较,并进行相应的数据分析。
2 密集匹配点云滤波算法
2.1 密集匹配点云滤波
由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] 。2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] 。不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] 。密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息。
点云数据滤波的目的是将噪声和非地形信息从点云数据中剔除,获得真实的数字地面高程模型DTM/DEM,同时滤波也是建筑物检测过程中常常涉及的一个基本步骤。目前点云滤波算法主要以针对LiDAR数据研究为主,但也应看到基于影像的密集匹配点云在数学表现形态上与LiDAR获取的点云类似,因此适用于LiDAR点云滤波的算法对密集匹配点云的滤波也有很强的借鉴意义。点云数据滤波以高程突变为依据分离地面点和非地面点,现有的滤波方法主要有基于表面、基于坡度、最小区块和聚类/分割等方法[11 ] 。目前主流的滤波算法大多针对具有一两种明显特征的地形区域,如城市聚集区、山区和林区等,但对具有多种地形特征的综合区域适用于较差,在滤波过程中参数设置复杂,调制好的参数对不同地形不同区域普适性差,经常需要调整,因而对作业人员的要求高,需要他们具有丰富的专业知识和经验,这也限制了点云数据的推广和应用。因此寻,找一个滤波算法在计算速度和易用性之间达到平衡,是密集匹配点云后处理急需解决的问题。
2.2 布料模拟滤波
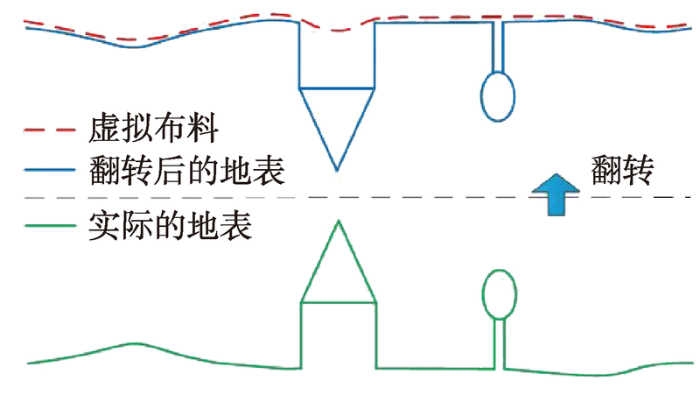
布料模拟滤波(Cloth Simulation Filtering,CSF)是一种物理模拟算法。该算法先将地表点云翻转,然后让一块由格网构成的虚拟布料放置于翻转后的点云表面最高处,使其自由落下,布料节点在重力和邻近节点相互作用力的影响下会产生位移,会贴附与地形表面上(图1 )。运算完成后,当布料上某节点的高程小于或等于对应点云的高程,则将用点云的高程为该节点赋值,并将其标记为不可移动点。最后,计算密集匹配点云与布料节点的高差,大于阈值的被视为非地面点高差,反之则被视为地面点[12 ,13 ] 。
图1 CSF滤波算法示意
Fig. 1 Schema of CSF filtering algorithm
从上述过程以及实际应用来看,CSF滤波算法比较简单,用户仅需要设置5个自定义参数:地形类别、格网分辨率、迭代次数、高期阈值和陡坡拟合参数[14 ] ,因此对用户的需求不高且容易上手,算法也比较成熟,滤波性能基本上不受地形条件和地物数量的限制。其在国际上获得一定的认同,已经集成到点云数据处理最主流的开源软件CloudCompare中,因此选用该算法的滤波结果为样本与本文提出的算法滤波结果进行对比分析试验。
2.3 渐进形态学滤波
数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的。数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云。集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种。膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值。在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] 。形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体。滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] 。众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点。在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应。通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除。多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸。但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] 。
2.4 基于特征的渐进形态学滤波
通过对需要滤波的点云数据与同一区域的数字线划图进行比较,显而易见的需要滤除的区域与部分典型矢量要素范围具有很强的一致性,也就是说无论何种地形的密集匹配点云滤波从地物属性上需要处理的无非是建筑物、立交桥、植被等矢量要素的区域。这些区域的点云虽然具有坐标高于地表的共同特征,但是地物不同对应的坡度、高差阈值等几何特征却各不相同,因此用同一算法同一参数进行点云滤波必然不会达到最理想效果。因此,本文所述算法的主要思路是在Zhang等[20 ] 的方法基础上,针对其算法的缺点,引入特征滤波的概念,先利用深度学习语义分割划定建筑物、植被等区域,并对建筑物区域进行首次滤除;然后将点云数据按地形特征分类,使用与之对应的经验参数进行二次滤波;最后对滤波结果进行基于场景知识的智能化诊断。
基于特征的渐进式形态学特征滤波的主要过程为:在首次滤波之前引入了深度学习语义分割,先利用图像形态变换方法和图像色彩变换方法对原始数据集进行扩充,接着使用卷积神经网络和反卷积神经网络得出多维映射矩阵(即原始图像和轮廓的对应关系)。整个网络分成两部分前半部分作用是特征提取,后半部分是上采样。特征提取过程每经过一个卷基层和一个池化层就生成一个尺度,包括原图尺度一共有5个尺度。上采样过程每上采样一次,就和特征提取部分对应的通道数相同尺度融合。依据损失函数不断调整最后得出多维映射矩阵并对原影像逐个像元进行二分类,如建筑物像元和非建筑物像元。由于卫星图像具有翻折和旋转不变性,在测试时,将图像进行水平、竖直、对角线3种翻折,每张图片预测5次,然后将5次的结果平均,最终实现建筑物区域边界的自动提取[22 ,23 ] 。在实际应用中为了更好地分割地物,将点云内插成RGB图像像素点之间具有一对一的对应关系的深度图像,深度图像每个像素值表示的是高程信息。然后使用针对深度图像的卷积神经网络,利用大量带标注数据对网络进行训练,每个标注数据包括深度特征和RGB特征,然后再使用训练结果对实际数据分割提取[24 ] ,以建筑物为例边界提取率可以达到80%(图2 )。以此为基础将标记为建筑物的所有点云滤除,此为首次滤波;然后将首次滤波后的点云内插成粗略的高程影像,对高程影像分别沿X、Y方向求梯度,并按一定间隔统计局部区域的梯度均值,比较均值与预设阈值,若均值大于预设阈值,则将对应格网区域标记为复杂区域,反之将对应格网区域标记为简单城区;接着根据点云粗分类结果,逐一区域的按照地形类型标记采用不同的经验滤波参数选取一系列低点作为初始地面点,由这些点构建不规则三角网,再按照距离阈值和法线夹角阈值的规则逐步加入其余点,加密构建地面点三角网[25 ] ,以此为基础将点云初分为地面点、非地面点;最后在初滤波的点云基础上,综合利用前期地物语义分割和几何属性自动判定区域类型,如分为山地、居住地与城镇、植被等,并在此知识的指导下,利用针对不同类型区域的预设滤波方案进行二次滤波,同时基于地面点、非地面点及其联合分析,获得每个分割块内的特征指数与统计特征,赋予每个点一个分类置信度,根据不同置信度进一步优化滤波结果。两次滤波迭代既避免了因深度学习漏检导致滤波不全,也更充分利用冗余信息智能的判定地形,以更好地实现滤波参数自适应。
图2 基于深度学习的遥感影像建筑物边界提取
Fig. 2 Building boundary extraction from remote sensing images based on deep learning
3 实验与分析
本文选用了2种来源的不同地形的高密度点云数据进行滤波实验。通过比较不同滤波方法滤波前后的点云定性分析直观判断滤波效果,再在同一数据选取几块区域进行人工分类,标记地面点和非地面点,作为真值与滤波结果定量比较进行误差分析。
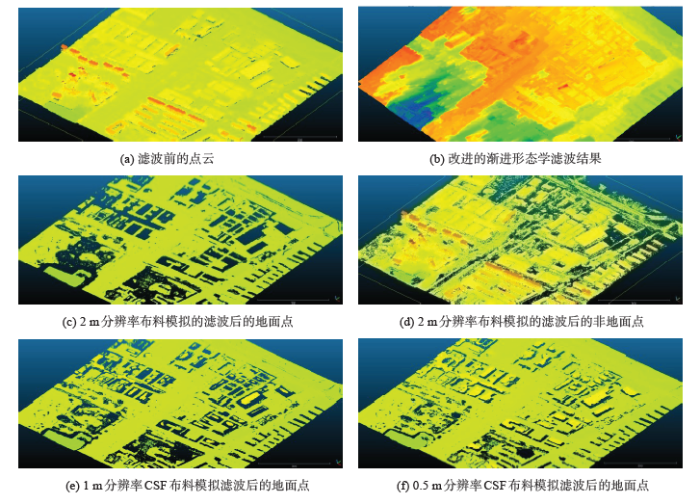
实例1是GSD为0.2 m的航空遥感影像,采用JX5数字摄影测量工作站获得逐像元高密点云,点云点数为46 083 751个。该选区为中国西部某城市部分区域,区域地面较为平坦,有树木、道路、低矮建筑物、高大建筑物等。图3 (a)表示滤波前的地面,存在明显建筑物。图3 (b)是用改进的渐进形态学滤波结果,建筑物、树木均被有效滤除,滤波效率受影像大小和点云数量的影响。图3 (c)和图3 (d)是用CSF滤波格网分辨率设为2 m后滤波得到的地面点和非地面点,直观地看建筑物滤除比较完全。图3 (e)和图3 (f)同样为CSF布料模拟滤波后的结果,只是格网分辨率分别设为1 m和0.5 m,分辨率越小,布料格网点越多,算法耗时越多,且受物理定律影响导致建筑物中心部分过滤不完全的部分越多。滤波结果与人工分类的地面点相比较,判断两类分类误差指标:第I类误差是将地面点认作非地面点;第Ⅱ类误差是将非地面点认作地面点。不同参数设置的2种滤波方法效率与误差对比见表1 。
图3 实例1点云改进的渐进形态学滤波与CSF滤波滤波对比
Fig. 3 Comparisons of improved asymptotic morphological filtering and CSF filtering for point clouds (example 1)
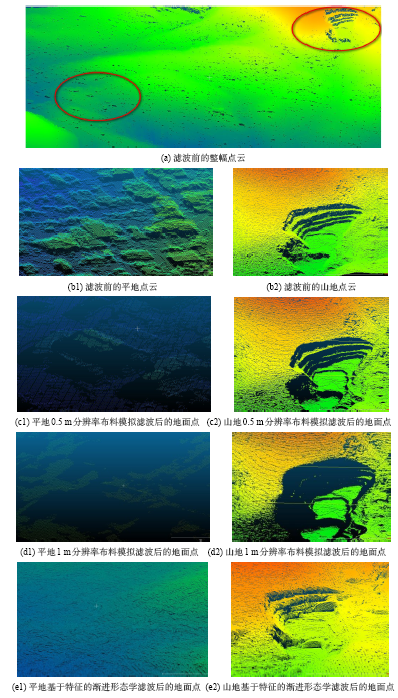
实例2来自Pleiades卫星立体影像密集匹配点云,GSD为0.5 m,点云点数为76 626 394,所选区域为靠近海洋的混合区域,既有丘陵,又有平坦区域,其中还包括建筑物和植被。图4 (a)地形由右上的丘陵向左下的平坦区域、海面过渡。对区域内丘陵和平地部分分别观察滤波效果,图4 的左面表示平坦地区的滤波结果,右面表示丘陵地区的滤波结果;其中图4 (b1)左为滤波前的平地点云,中央存在明显建筑物,图4 (b2)为滤波前的丘陵点云。图4 (c)和 图4 (d)用CSF布料模拟的滤波结果,滤波格网分辨率设为0.5 m和1 m,在分辨率设为0.5 m时很明显平地点云中建筑物中心部分没有过滤完全,丘陵地带细节保留较好,类梯田处有部分地面点云被滤除;在分辨率设为1 m时虽然建筑物完全过滤掉了,但是丘陵地带中地面点尤其是类梯田区域点云丢失,如果后期构建三角网该地区因没有细节会变成一块平坡,由此可以看出该算法针对平地山地混合区域的滤波效果并不理想。图4 (e)是本文提出的基于特征的渐进形态学方法滤波结果,平地的建筑物过滤成功率很高,山地也较好地保留了地形,尤其是类梯田区域细节保留较好;与人工编辑的点云分类进行定量比较,效率和误差对比结果见表2 。
图4 实例2点云改进的渐进形态学滤波与CSF滤波对比图
Fig. 4 Comparisons of improved asymptotic morphological filtering and CSF filtering for point clouds (example 2)
通过上述实验对比分析表明:在效率上,基于特征的渐进形态学滤波与数据规模正相关,在数据规模较大时效率低,而CSF滤波效率与参数有关而与数据规模无关,适宜应用于快拼影像、应急保障等对滤波效率要求较高的场景;在精度上,CSF滤波对单一地形尤其是平地滤波效果较好,基于特征的渐进形态学方法滤波因将整个区域按地形分割成若干区域,对这些区域进行自适应参数滤波,因此保证了不同地形区域的滤波效果,在混合地形滤波在精度上来说具有明显的优势。
4 结论
在分析高密匹配点云与激光点云的异同以及目前主流点云滤波算法的缺陷的基础上,本文在渐进形态学算法基础上改进滤波算法;选择易操作、效率高、获得国际认可的CSF布料模拟滤波算法作为定性和定量的对比样本;提出一种基于区域特征分割的高密匹配点云滤波算法,在滤波之前引入深度学习语义分割进行特征分类,根据分类结果先将建筑物区域的点云滤除,再按分类划分区域,并以与分类类型对应预设的参数分别对不同类型的区域进行参数自适应滤波。通过对比实验验证,布料模拟滤波对单一地形尤其是平坦地区滤波效果较好,算法参数少效率高,比较适用城市区域以及对滤波效率要求较高的应用;而基于区域特征分割的高密匹配点云滤波算法滤波精度高,与其他对混合地形滤波结果比较理想,但是算法效率受点数量多少制约。
基于特征的渐进形态学滤波算法虽然精度较高,但仍存在不足:① 对连续的无地面露出密集植被区域滤除精度难以保证;② 算法复杂滤波计算时间较长,不能满足应急保障的效率要求。因此,借助机器学习在图像分类中优势,结合深度变化信息对地面和植被进行精分类,预估植被高度以保证滤波精度;在对作业效率要求较高的情况下,考虑先利用深度学习对地形进行分类并按照分类结果将点云分成若干区域,再利用CSF算法按照预估的地形类别对应的参数逐区域滤波。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
惠振阳 ,程朋根 ,官云兰 ,等 .机载LiDAR点云滤波综述
[J].激光与光电子学进展 ,2018 (6 ):1 -9 .
URL
[本文引用: 1]
[ Hui Z Y Cheng P G Guan Y L et al .Review on airborne LiDAR point cloud filtering
[J]. Laser & Optoelectronics Progress , 2018 (6 ):1 -9 . ]
URL
[本文引用: 1]
[2]
廖小罕 ,周成虎 ,苏奋振 ,等 .无人机遥感众创时代
[J].地球信息科学学报 ,2016 ,18 (11 ):1439 -1447 .
URL
[本文引用: 1]
[ Liao X H Zhou C H Su F Z et al .The mass innovation era of UAV remote sensing
[J]. Journal of Geo-information Science , 2016 ,18 (11 ):1439 -1448 . ]
URL
[本文引用: 1]
[3]
时培强 ,江虹 .机载LiDAR点云数据的多级滤波方法
[J].通信技术 ,2018 (1 ):67 -74 .
URL
[本文引用: 1]
摘要
激光雷达数据滤波是获取高精度数字高程模型的重要手段和前提条件。为了实现对激光雷达数据的准确滤波,在分析部分经典算法特点的基础上,提出一种机载Li DAR点云数据的多级滤波算法。该方法首先通过格网化分建立数据索引,在局部区域利用均值限差法得到可靠的初始地面种子点,求解拟合曲面系数,在降低Ⅱ类误差的前提下,利用曲面拟合算法进行多次迭代滤波,然后使用三角形角度限制法判断剩余点,最终得到较为准确的滤波结果。基于ISPRS的数据实验表明,与经典算法相比,所提方法在Ⅱ类误差较低的情况下总体滤波精度高,能够得到可靠的滤波结果,具有较高的可行性。
[ Shi P Q Jiang H Multilevel method for airborne LiDAR point clouds data filtering
[J]. Communications Technology , 2018 (1 ):67 -74 . ]
URL
[本文引用: 1]
摘要
激光雷达数据滤波是获取高精度数字高程模型的重要手段和前提条件。为了实现对激光雷达数据的准确滤波,在分析部分经典算法特点的基础上,提出一种机载Li DAR点云数据的多级滤波算法。该方法首先通过格网化分建立数据索引,在局部区域利用均值限差法得到可靠的初始地面种子点,求解拟合曲面系数,在降低Ⅱ类误差的前提下,利用曲面拟合算法进行多次迭代滤波,然后使用三角形角度限制法判断剩余点,最终得到较为准确的滤波结果。基于ISPRS的数据实验表明,与经典算法相比,所提方法在Ⅱ类误差较低的情况下总体滤波精度高,能够得到可靠的滤波结果,具有较高的可行性。
[4]
陈香 ,王琳 ,张晔 .基于SIFT的无人机遥感影像匹配算法研究
[J].测绘与空间地理信息 ,2013 (4 ):106 -108 .
https://doi.org/10.3969/j.issn.1672-5867.2013.04.033
URL
[本文引用: 1]
摘要
无人机遥感影像存在像幅小、数 量多、基线短、重叠度不规则且倾角过大等问题,传统的灰度匹配很难胜任无人机遥感影像的匹配。SIFT特征具有旋转、微小仿射的不变性。本文分析SIFT 特征的优点,指出其存在的问题,结合灰度匹配、最小二乘匹配及影像金字塔策略,提出了一套适合无人机遥感影像的匹配算法流程。
[ Chen X Wang L Zhang Y The research on matching algorithm of the unmanned aerial vehicle remote sensing images based on SIFT
[J]. Geomatics & Spatial Information Technology , 2013 (4 ):106 -108 . ]
https://doi.org/10.3969/j.issn.1672-5867.2013.04.033
URL
[本文引用: 1]
摘要
无人机遥感影像存在像幅小、数 量多、基线短、重叠度不规则且倾角过大等问题,传统的灰度匹配很难胜任无人机遥感影像的匹配。SIFT特征具有旋转、微小仿射的不变性。本文分析SIFT 特征的优点,指出其存在的问题,结合灰度匹配、最小二乘匹配及影像金字塔策略,提出了一套适合无人机遥感影像的匹配算法流程。
[5]
张彦峰 . 利用多条件约束的航空影像逐像素密集匹配算法研究
[D].北京:中国测绘科学研究院 ,2014 .
[本文引用: 1]
[ Zhang Y F Pixel-wise dense matching of aerial images with multi-conditional constraints
[D]. Bei
[J].ng: Chinese Academy of Surveying And Mapping , 2014 . ]
[本文引用: 1]
[6]
邹小丹 . 基于半全局优化的多视影像匹配方法与应用
[D].长沙:中南大学 ,2013 .
[本文引用: 1]
[ Zhou X D A multi-view image matching method based on semi-global optimization and its application
[D]. Changsha: Central South University , 2013 . ]
[本文引用: 1]
[7]
Hirschmuller H Accurate and efficient stereo processing by semi-global matching and mutual information
[C].IEEE Conference on CVPR.San Diego , 2005 :807 -814 .
[本文引用: 1]
[8]
杨化超 ,姚国标 ,王永波 .基于SIFT的宽基线立体影像密集匹配
[J].测绘学报 ,2011 ,40 (5 ):537 -543 .
[本文引用: 1]
[ Yang H C Yao G B Wang Y B Dense matching for wide base-line stereo images based on SIFT
[J]. Acta Geodaetica et Cartographica Sinica , 2011 ,40 (5 ):537 -543 . ]
[本文引用: 1]
[9]
张力 ,张继贤 .基于多基线影像匹配的高分辨率遥感影像DEM的自动生成
[J].测绘科学 ,2008 (52 ):35 -39 .
URL
[本文引用: 1]
摘要
以青南高原三江源试验区为例,采用SPOT-5 HRS立体影像和HRS/HRG三立体像对生成试验区1∶5万25 m间隔DEM,并利用大量外业和内业检查点对自动提取的DEM进行精度分析。试验结果表明,利用所提出的影像匹配方法可以从SPOT-5卫星影像中全自动生成1∶5万DEM。另外,SPOT-5 HRS/HRG三影像立体条带数据适用于地势起伏较大的深切割山地区域。采用此方法,可以同时保持自动生成的DEM的精度和可靠性,大大减少自动生成的DEM中存在的粗差和人工后处理的工作量。
[ Zhang L Zhang J X Multi-image matching for DEM generation from satellite imagery
[J]. Science of Surveying and Mapping , 2008 (52 ):35 -39 . ]
URL
[本文引用: 1]
摘要
以青南高原三江源试验区为例,采用SPOT-5 HRS立体影像和HRS/HRG三立体像对生成试验区1∶5万25 m间隔DEM,并利用大量外业和内业检查点对自动提取的DEM进行精度分析。试验结果表明,利用所提出的影像匹配方法可以从SPOT-5卫星影像中全自动生成1∶5万DEM。另外,SPOT-5 HRS/HRG三影像立体条带数据适用于地势起伏较大的深切割山地区域。采用此方法,可以同时保持自动生成的DEM的精度和可靠性,大大减少自动生成的DEM中存在的粗差和人工后处理的工作量。
[10]
吴军 ,姚泽鑫 ,程门门 .融合SIFT与SGM的倾斜航空影像密集匹配
[J].遥感学报 ,2015 ,19 (3 ):431 -442 .
[本文引用: 1]
[ Wu J Yao Z X Cheng M M Airborne oblique stereo image dense matching by integrating SIFT and SGM algorithm
[J]. Journal of Remote Sensing , 2015 ,19 (3 ):431 -442 . ]
[本文引用: 1]
[11]
闸旋 ,王慧 ,程挺 ,等 .基于GPGPU的数学形态学LiDAR点云快速滤波方法
[J].测绘科学技术学报 ,2013 ,30 (1 ):73 -77 .
https://doi.org/10.3969/j.issn.1673-6338.2013.01.017
URL
[本文引用: 1]
摘要
对机载激光雷达获取点云数据进行滤波时,因其数据量大,往往会耗费很多时间。在传统数学形态 学LiDAR点云滤波方法基础上,提出利用基于GPU的并行技术,将大量密集运算分配到众多计算单元上并行执行,达到快速滤波的目的。通过相应的实验,验 证了利用GPU并行计算技术实现的LiDAR点云快速滤波的正确性与可行性。
[ Zha X Wang H Cheng T et al .Morphological LiDAR points cloud filtering method based on GPGPU
[J]. Journal of Geomatics Science and Technology , 2013 ,30 (1 ):73 -77 . ]
https://doi.org/10.3969/j.issn.1673-6338.2013.01.017
URL
[本文引用: 1]
摘要
对机载激光雷达获取点云数据进行滤波时,因其数据量大,往往会耗费很多时间。在传统数学形态 学LiDAR点云滤波方法基础上,提出利用基于GPU的并行技术,将大量密集运算分配到众多计算单元上并行执行,达到快速滤波的目的。通过相应的实验,验 证了利用GPU并行计算技术实现的LiDAR点云快速滤波的正确性与可行性。
[12]
Zhang W Qi J Wan P et al .An easy-to-use airborne LiDAR data filtering method based on cloth simulation
[J]. Remote Sensing , 2016 ,8 (6 ):501 .
https://doi.org/10.3390/rs8060501
URL
[本文引用: 1]
摘要
Separating point clouds into ground and non-ground measurements is an essential step to generate digital terrain models (DTMs) from airborne LiDAR (light detection and ranging) data. However, most filtering algorithms need to carefully set up a number of complicated parameters to achieve high accuracy. In this paper, we present a new filtering method which only needs a few easy-to-set integer and Boolean parameters. Within the proposed approach, a LiDAR point cloud is inverted, and then a rigid cloth is used to cover the inverted surface. By analyzing the interactions between the cloth nodes and the corresponding LiDAR points, the locations of the cloth nodes can be determined to generate an approximation of the ground surface. Finally, the ground points can be extracted from the LiDAR point cloud by comparing the original LiDAR points and the generated surface. Benchmark datasets provided by ISPRS (International Society for Photogrammetry and Remote Sensing) working Group III/3 are used to validate the proposed filtering method, and the experimental results yield an average total error of 4.58%, which is comparable with most of the state-of-the-art filtering algorithms. The proposed easy-to-use filtering method may help the users without much experience to use LiDAR data and related technology in their own applications more easily.
[13]
Zhang W Chen Y Wang H et al .Efficient registration of terrestrial LiDAR scans using a coarse-to-fine strategy for forestry applications
[J]. Agricultural and Forest Meteorology , 2016 ,225 :8 -23 .
[本文引用: 1]
[14]
张昌赛 ,刘正军 ,杨树文 ,等 .基于LiDAR数据的布料模拟滤波算法的适用性分析
[J].激光技术 ,2018 (5 ):7 -15 .
URL
[本文引用: 1]
[ Zhang C S Liu Z J Yang S W et al .Applicability analysis of cloth simulation filtering algorithm based on LiDAR data
[J]. Laser Technology ,2018 (5 ):7 -15 . ]
URL
[本文引用: 1]
[15]
李峰 ,崔希民 ,袁德宝 ,等 .改进坡度的LiDAR点云形态学滤波算法
[J].大地测量与地球动力学 ,2012 ,32 (5 ):128 -132 .
Magsci
[本文引用: 1]
摘要
<FONT face=Verdana>针对经典形态学滤波算法中存在过多预置参数的现状,通过自动计算全区域地形的平均近似坡度,估计窗口迭代过程中用到的高差阈值。在得到初始格网的类别后,再利用格网坡度和高差阈值进一步区分格网内点的类别,最终达到移除非地面点类的目的。该算法只需输入最大建筑物尺寸、激光点云的误差,就可以有效地过滤绝大多数的非地面点类,同时减少了Ⅰ类误差和总误差的大小。</FONT>
[ Li F Cui X M Yuan D B et al .Slope improved morphological filtering algorithm for LiDAR point clouds
[J]. Journal of Geodesy and Geodynamics , 2012 ,32 (5 ):128 -132 . ]
Magsci
[本文引用: 1]
摘要
<FONT face=Verdana>针对经典形态学滤波算法中存在过多预置参数的现状,通过自动计算全区域地形的平均近似坡度,估计窗口迭代过程中用到的高差阈值。在得到初始格网的类别后,再利用格网坡度和高差阈值进一步区分格网内点的类别,最终达到移除非地面点类的目的。该算法只需输入最大建筑物尺寸、激光点云的误差,就可以有效地过滤绝大多数的非地面点类,同时减少了Ⅰ类误差和总误差的大小。</FONT>
[16]
梁鑫 ,杨晓云 .基于坡度自适应的机载LiDAR分割算法
[J].测绘科学 ,2013 (2 ):72 -74 .
[本文引用: 1]
[ Liang X Yang X Y Slope adaptive based segmentation for airborne LiDAR
[J]. Science of Surveying and Mapping , 2013 (2 ):72 -74 . ]
[本文引用: 1]
[17]
惠振阳 ,胡友健 .基于LiDAR数字高程模型构建的数学形态学滤波方法综述
[J].激光与光电子学进展 ,2016 (8 ):7 -13 .
URL
[本文引用: 1]
摘要
数字高程模型的获取是智慧城市建立的前提,机载LiDAR技术为数字高程模型的获取提供了新的技术手段。准确的地面点滤波是获取精确数字高程模型的关键,因此机载LiDAR点云滤波一直都是研究的热点与难点。由于数学形态学滤波法应用于机载LiDAR点云滤波时具有简单高效的特性,所以该类型算法是点云滤波中的主流算法。为深入了解此类型算法,对国内外现有的基于数学形态学的点云滤波法进行系统总结,详细分析了各种方法的特点、可解决的问题及存在的问题,并结合现有基于数学形态学滤波法的主要缺陷展望了此类型算法的发展方向。
[ Hui Z Y Hu Y J Review on morphological filtering algorithms based on LiDAR digital elevation model construction
[J]. Laser & Optoelectronics Progress , 2016 (8 ):7 -13 . ]
URL
[本文引用: 1]
摘要
数字高程模型的获取是智慧城市建立的前提,机载LiDAR技术为数字高程模型的获取提供了新的技术手段。准确的地面点滤波是获取精确数字高程模型的关键,因此机载LiDAR点云滤波一直都是研究的热点与难点。由于数学形态学滤波法应用于机载LiDAR点云滤波时具有简单高效的特性,所以该类型算法是点云滤波中的主流算法。为深入了解此类型算法,对国内外现有的基于数学形态学的点云滤波法进行系统总结,详细分析了各种方法的特点、可解决的问题及存在的问题,并结合现有基于数学形态学滤波法的主要缺陷展望了此类型算法的发展方向。
[18]
惠振阳 ,程朋根 ,官云兰 ,等 .机载LiDAR点云滤波综述
[J].激光与光电子学进展 ,2018 (6 ):7 -15 .
URL
[本文引用: 1]
[ Hui Z Y Cheng P G Guan Y L et al .Review on airborne LiDAR point cloud filtering
[J]. Laser & Optoelectronics Progress , 2018 (6 ):7 -15 . ]
URL
[本文引用: 1]
[19]
Vosselman G Slope based filtering of laser altimetry data
[J]. International Archives of Photogrammetry and Remote Sensing, and Spatial Information Sciences ,2000 ,33 (B3 ):935 -942 .
[本文引用: 1]
[20]
Zhang K Chen S Whitman D et al .A progressive morphological filter for removing nonground measurements form airborne LIDAR data
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2003 ,41 (4 ):872 -882 .
[本文引用: 2]
[21]
苗启广 ,郭雪 ,宋建锋 ,等 .基于区域预测的LiDAR点云数据形态学滤波算法
[J].激光与光电子学进展 ,2015 ,52 (1 ):
[本文引用: 1]
011003 .
[本文引用: 1]
[ Miao Q G Guo X Song J et al .LiDAR point cloud data with morphological filter algorithm based on region prediction
[J]. Laser & Optoelectronics Progress ,2015 ,52 (1 ):011003 . ]
[本文引用: 1]
[22]
Long J Shelhamer E Darrell T Fully convolutional networks for semantic segmentation
[J]. IEEE Transactions On Pattern Analysis &Machine Intelligence , 2014 ,39 (4 ):640 -651 .
[本文引用: 1]
[23]
曾妮红 ,岳迎春 ,魏占营 ,等 .车载LiDAR点云滤波的改进不规则三角网加密方法
[J].测绘科学 ,2016 ,41 (9 ):136 -139 .
[本文引用: 1]
[ Zeng N H Yue Y C Wei Z Y et al .An improved irregular triangular network encryption method of vehicle-borne LiDAR point clouds
[J]. Science of Surveying and Mapping , 2016 ,41 (9 ):136 -139 . ]
[本文引用: 1]
机载LiDAR点云滤波综述
1
... 快速、高精度的获取点云是实现上述基于三维坐标的应用的基础.目前获取点云主要途径有 2种:由LiDAR、SAR等主动遥感方式直接获取点云;用摄影测量的办法由立体影像匹配生成点云.LiDAR是一种主动遥感技术,三维点云获取效率高,且不受日照、天气条件限制,但其获取的三维点云存在断裂线采集困难、干扰点去除不易以及规则目标如建筑物边界不能清晰判断等问题,导致后处理困难[1 ] .而影像密集匹配生成的点云具有数据获取便捷、数据来源丰富、相比之下成本低等优点,尤其近年来国内无人机低空遥感发展迅速,搭载的绝大多数传感器是各种幅面的数码相机[2 ] ,因此利用无人机遥感影像密集匹配获取点云的代价远低于机载LiDAR点云,并且由于飞行高度低、影像分辨率高,与机载LiDAR点云相比获取的数据在边缘、纹理和特征线上的表现更加优异. ...
机载LiDAR点云滤波综述
1
... 快速、高精度的获取点云是实现上述基于三维坐标的应用的基础.目前获取点云主要途径有 2种:由LiDAR、SAR等主动遥感方式直接获取点云;用摄影测量的办法由立体影像匹配生成点云.LiDAR是一种主动遥感技术,三维点云获取效率高,且不受日照、天气条件限制,但其获取的三维点云存在断裂线采集困难、干扰点去除不易以及规则目标如建筑物边界不能清晰判断等问题,导致后处理困难[1 ] .而影像密集匹配生成的点云具有数据获取便捷、数据来源丰富、相比之下成本低等优点,尤其近年来国内无人机低空遥感发展迅速,搭载的绝大多数传感器是各种幅面的数码相机[2 ] ,因此利用无人机遥感影像密集匹配获取点云的代价远低于机载LiDAR点云,并且由于飞行高度低、影像分辨率高,与机载LiDAR点云相比获取的数据在边缘、纹理和特征线上的表现更加优异. ...
无人机遥感众创时代
1
2016
... 快速、高精度的获取点云是实现上述基于三维坐标的应用的基础.目前获取点云主要途径有 2种:由LiDAR、SAR等主动遥感方式直接获取点云;用摄影测量的办法由立体影像匹配生成点云.LiDAR是一种主动遥感技术,三维点云获取效率高,且不受日照、天气条件限制,但其获取的三维点云存在断裂线采集困难、干扰点去除不易以及规则目标如建筑物边界不能清晰判断等问题,导致后处理困难[1 ] .而影像密集匹配生成的点云具有数据获取便捷、数据来源丰富、相比之下成本低等优点,尤其近年来国内无人机低空遥感发展迅速,搭载的绝大多数传感器是各种幅面的数码相机[2 ] ,因此利用无人机遥感影像密集匹配获取点云的代价远低于机载LiDAR点云,并且由于飞行高度低、影像分辨率高,与机载LiDAR点云相比获取的数据在边缘、纹理和特征线上的表现更加优异. ...
无人机遥感众创时代
1
2016
... 快速、高精度的获取点云是实现上述基于三维坐标的应用的基础.目前获取点云主要途径有 2种:由LiDAR、SAR等主动遥感方式直接获取点云;用摄影测量的办法由立体影像匹配生成点云.LiDAR是一种主动遥感技术,三维点云获取效率高,且不受日照、天气条件限制,但其获取的三维点云存在断裂线采集困难、干扰点去除不易以及规则目标如建筑物边界不能清晰判断等问题,导致后处理困难[1 ] .而影像密集匹配生成的点云具有数据获取便捷、数据来源丰富、相比之下成本低等优点,尤其近年来国内无人机低空遥感发展迅速,搭载的绝大多数传感器是各种幅面的数码相机[2 ] ,因此利用无人机遥感影像密集匹配获取点云的代价远低于机载LiDAR点云,并且由于飞行高度低、影像分辨率高,与机载LiDAR点云相比获取的数据在边缘、纹理和特征线上的表现更加优异. ...
机载LiDAR点云数据的多级滤波方法
1
... 无论哪种方式获取的点云处理的基本环节都是将地面点分离出来,这一过程就是点云滤波.目前主流的点云滤波方法包括:基于数学形态学的点云滤波、基于坡度的点云滤波、基于曲面拟合的滤波算法、基于不规则三角网的滤波算法、基于分割的滤波算法等[3 ] ,这些滤波算法主要针对LiDAR点云,ISPRS对不同的滤波算法进行了对比认为,各种算法都具有不同的优势和短板,如三角网滤波算法计算量和复杂度大、曲面拟合算法滤波精度取决于种子点选取、基于坡度的滤波算法主要依赖初始坡度的设定等,多数滤波算法对特定地形可以得到理想的效果,但对于多种复杂地形滤波效果不佳.对本文讨论的密集匹配三维点云而言,目前的滤波算法存在3个不足:① 算法对密集匹配的三维点云的超大数据量缺乏针对性研究;② 算法并没有利用影像的颜色信息;③ 算法对参数依赖较高,普遍对单一地形滤波效果较好,但对复杂地形(如依山而建的城镇)点云滤波效果差强人意.如果需要达到满意的滤波效果,在实际作业中甚至需要进行人工按地形切块分别进行滤波,过程操作繁琐既影响工作效率也容易出错. ...
机载LiDAR点云数据的多级滤波方法
1
... 无论哪种方式获取的点云处理的基本环节都是将地面点分离出来,这一过程就是点云滤波.目前主流的点云滤波方法包括:基于数学形态学的点云滤波、基于坡度的点云滤波、基于曲面拟合的滤波算法、基于不规则三角网的滤波算法、基于分割的滤波算法等[3 ] ,这些滤波算法主要针对LiDAR点云,ISPRS对不同的滤波算法进行了对比认为,各种算法都具有不同的优势和短板,如三角网滤波算法计算量和复杂度大、曲面拟合算法滤波精度取决于种子点选取、基于坡度的滤波算法主要依赖初始坡度的设定等,多数滤波算法对特定地形可以得到理想的效果,但对于多种复杂地形滤波效果不佳.对本文讨论的密集匹配三维点云而言,目前的滤波算法存在3个不足:① 算法对密集匹配的三维点云的超大数据量缺乏针对性研究;② 算法并没有利用影像的颜色信息;③ 算法对参数依赖较高,普遍对单一地形滤波效果较好,但对复杂地形(如依山而建的城镇)点云滤波效果差强人意.如果需要达到满意的滤波效果,在实际作业中甚至需要进行人工按地形切块分别进行滤波,过程操作繁琐既影响工作效率也容易出错. ...
基于SIFT的无人机遥感影像匹配算法研究
1
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于SIFT的无人机遥感影像匹配算法研究
1
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
利用多条件约束的航空影像逐像素密集匹配算法研究
1
2014
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
利用多条件约束的航空影像逐像素密集匹配算法研究
1
2014
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于半全局优化的多视影像匹配方法与应用
1
2013
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于半全局优化的多视影像匹配方法与应用
1
2013
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
Accurate and efficient stereo processing by semi-global matching and mutual information
1
2005
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于SIFT的宽基线立体影像密集匹配
1
2011
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于SIFT的宽基线立体影像密集匹配
1
2011
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于多基线影像匹配的高分辨率遥感影像DEM的自动生成
1
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于多基线影像匹配的高分辨率遥感影像DEM的自动生成
1
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
融合SIFT与SGM的倾斜航空影像密集匹配
1
2015
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
融合SIFT与SGM的倾斜航空影像密集匹配
1
2015
... 由二维影像重建三维场景过程中密集匹配是一个基础步骤,也是生成数字表面模型(DSM)、三维建模以及纠正正射影像的关键技术,是近一段时间数字摄影测量、计算机视觉领域研究的难点和热点[4 ,5 ,6 ] .2005年德国宇航局的Hirschmüller提出了半全局(Semi Global Matching,SGM)密集匹配算法,采用多个方向的一维平滑约束来模拟二维的平滑约束[7 ] .不仅得到的视差结果可以与全局密集匹配算法相媲美,而且匹配算法通过GPU并行计算优化可以得到较高效率,因此在摄影测量领域得到了广泛的应用[8 ,9 ,10 ] .密集匹配点云因为数据源不同,与LiDAR点云相比也具有独特性,每一个点不仅仅有三维坐标信息,也有从影像上获取的灰度或者颜色信息,甚至可以获取多光谱信息. ...
基于GPGPU的数学形态学LiDAR点云快速滤波方法
1
2013
... 点云数据滤波的目的是将噪声和非地形信息从点云数据中剔除,获得真实的数字地面高程模型DTM/DEM,同时滤波也是建筑物检测过程中常常涉及的一个基本步骤.目前点云滤波算法主要以针对LiDAR数据研究为主,但也应看到基于影像的密集匹配点云在数学表现形态上与LiDAR获取的点云类似,因此适用于LiDAR点云滤波的算法对密集匹配点云的滤波也有很强的借鉴意义.点云数据滤波以高程突变为依据分离地面点和非地面点,现有的滤波方法主要有基于表面、基于坡度、最小区块和聚类/分割等方法[11 ] .目前主流的滤波算法大多针对具有一两种明显特征的地形区域,如城市聚集区、山区和林区等,但对具有多种地形特征的综合区域适用于较差,在滤波过程中参数设置复杂,调制好的参数对不同地形不同区域普适性差,经常需要调整,因而对作业人员的要求高,需要他们具有丰富的专业知识和经验,这也限制了点云数据的推广和应用.因此寻,找一个滤波算法在计算速度和易用性之间达到平衡,是密集匹配点云后处理急需解决的问题. ...
基于GPGPU的数学形态学LiDAR点云快速滤波方法
1
2013
... 点云数据滤波的目的是将噪声和非地形信息从点云数据中剔除,获得真实的数字地面高程模型DTM/DEM,同时滤波也是建筑物检测过程中常常涉及的一个基本步骤.目前点云滤波算法主要以针对LiDAR数据研究为主,但也应看到基于影像的密集匹配点云在数学表现形态上与LiDAR获取的点云类似,因此适用于LiDAR点云滤波的算法对密集匹配点云的滤波也有很强的借鉴意义.点云数据滤波以高程突变为依据分离地面点和非地面点,现有的滤波方法主要有基于表面、基于坡度、最小区块和聚类/分割等方法[11 ] .目前主流的滤波算法大多针对具有一两种明显特征的地形区域,如城市聚集区、山区和林区等,但对具有多种地形特征的综合区域适用于较差,在滤波过程中参数设置复杂,调制好的参数对不同地形不同区域普适性差,经常需要调整,因而对作业人员的要求高,需要他们具有丰富的专业知识和经验,这也限制了点云数据的推广和应用.因此寻,找一个滤波算法在计算速度和易用性之间达到平衡,是密集匹配点云后处理急需解决的问题. ...
An easy-to-use airborne LiDAR data filtering method based on cloth simulation
1
2016
... 布料模拟滤波(Cloth Simulation Filtering,CSF)是一种物理模拟算法.该算法先将地表点云翻转,然后让一块由格网构成的虚拟布料放置于翻转后的点云表面最高处,使其自由落下,布料节点在重力和邻近节点相互作用力的影响下会产生位移,会贴附与地形表面上(图1 ).运算完成后,当布料上某节点的高程小于或等于对应点云的高程,则将用点云的高程为该节点赋值,并将其标记为不可移动点.最后,计算密集匹配点云与布料节点的高差,大于阈值的被视为非地面点高差,反之则被视为地面点[12 ,13 ] . ...
Efficient registration of terrestrial LiDAR scans using a coarse-to-fine strategy for forestry applications
1
2016
... 布料模拟滤波(Cloth Simulation Filtering,CSF)是一种物理模拟算法.该算法先将地表点云翻转,然后让一块由格网构成的虚拟布料放置于翻转后的点云表面最高处,使其自由落下,布料节点在重力和邻近节点相互作用力的影响下会产生位移,会贴附与地形表面上(图1 ).运算完成后,当布料上某节点的高程小于或等于对应点云的高程,则将用点云的高程为该节点赋值,并将其标记为不可移动点.最后,计算密集匹配点云与布料节点的高差,大于阈值的被视为非地面点高差,反之则被视为地面点[12 ,13 ] . ...
基于LiDAR数据的布料模拟滤波算法的适用性分析
1
2018
... 从上述过程以及实际应用来看,CSF滤波算法比较简单,用户仅需要设置5个自定义参数:地形类别、格网分辨率、迭代次数、高期阈值和陡坡拟合参数[14 ] ,因此对用户的需求不高且容易上手,算法也比较成熟,滤波性能基本上不受地形条件和地物数量的限制.其在国际上获得一定的认同,已经集成到点云数据处理最主流的开源软件CloudCompare中,因此选用该算法的滤波结果为样本与本文提出的算法滤波结果进行对比分析试验. ...
基于LiDAR数据的布料模拟滤波算法的适用性分析
1
2018
... 从上述过程以及实际应用来看,CSF滤波算法比较简单,用户仅需要设置5个自定义参数:地形类别、格网分辨率、迭代次数、高期阈值和陡坡拟合参数[14 ] ,因此对用户的需求不高且容易上手,算法也比较成熟,滤波性能基本上不受地形条件和地物数量的限制.其在国际上获得一定的认同,已经集成到点云数据处理最主流的开源软件CloudCompare中,因此选用该算法的滤波结果为样本与本文提出的算法滤波结果进行对比分析试验. ...
改进坡度的LiDAR点云形态学滤波算法
1
2012
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
改进坡度的LiDAR点云形态学滤波算法
1
2012
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于坡度自适应的机载LiDAR分割算法
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于坡度自适应的机载LiDAR分割算法
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于LiDAR数字高程模型构建的数学形态学滤波方法综述
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于LiDAR数字高程模型构建的数学形态学滤波方法综述
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
机载LiDAR点云滤波综述
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
机载LiDAR点云滤波综述
1
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
Slope based filtering of laser altimetry data
1
2000
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
A progressive morphological filter for removing nonground measurements form airborne LIDAR data
2
2003
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
... 通过对需要滤波的点云数据与同一区域的数字线划图进行比较,显而易见的需要滤除的区域与部分典型矢量要素范围具有很强的一致性,也就是说无论何种地形的密集匹配点云滤波从地物属性上需要处理的无非是建筑物、立交桥、植被等矢量要素的区域.这些区域的点云虽然具有坐标高于地表的共同特征,但是地物不同对应的坡度、高差阈值等几何特征却各不相同,因此用同一算法同一参数进行点云滤波必然不会达到最理想效果.因此,本文所述算法的主要思路是在Zhang等[20 ] 的方法基础上,针对其算法的缺点,引入特征滤波的概念,先利用深度学习语义分割划定建筑物、植被等区域,并对建筑物区域进行首次滤除;然后将点云数据按地形特征分类,使用与之对应的经验参数进行二次滤波;最后对滤波结果进行基于场景知识的智能化诊断. ...
基于区域预测的LiDAR点云数据形态学滤波算法
1
2015
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于区域预测的LiDAR点云数据形态学滤波算法
1
2015
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
基于区域预测的LiDAR点云数据形态学滤波算法
1
2015
... 数学形态学方法使用一个携带对象特征的结构元素来度量和提取影像中对应形状,以此来达到对特定目标分析和识别的目的.数学形态学方法由德国斯图加特大学的Lindenberger在1993年首次提出,是目前LiDAR点云滤波中的主流算法,同样也适用于密集匹配点云.集合论是数学形态学方法的数学基础,主要的运算包括腐蚀、膨胀、开运算、闭运算4种.膨胀运算是求局部最大值的操作,在滤波计算中表现为在窗口范围内取得最大高程值,腐蚀运算与之相反,获取窗口范围内最低点的高程值.在运算时一般不单独使用膨胀和腐蚀运算,而将2个基础算子进行组合成开运算和闭运算,先腐蚀后膨胀的过程称为开运算,先膨胀后腐蚀为闭运算[15 ] .形态学开运算目的是开运算能够剔除孤立的小物体、毛刺,平滑较大物体的边界,而总的位置和形状不明显改变[16 ] ,因而开运算能够一定程度的滤除窗口内高程突变的物体.滤波效果好坏的关键在于选择合适的滤波窗口,滤波窗口设置过大容易使地形过于平滑而失去特征,而滤波窗口过小则滤波计算不能移除大型建筑物[17 ,18 ] .众多学者为解决上述问题,对数学形态学方法进行改造和发展,Vosselman[19 ] 提出了基于坡度变化的形态学滤波方法;Zhang等[20 ] 提出了一种代码简单、易于实现的滤波算法,该算法借助一个不断增加窗口大小的开算子,滤波器就可以逐个格网剔除非地形点来获取地面点.在该方法中,根据相邻窗口大小的变化量和地形坡度计算高差阈值,因此不同的窗口与不同的阈值相对应.通过对比点云运算前后的高差变化,判定高差变化大于阈值的点为非地面点并将其滤除.多次迭代该运算,直到滤波窗口大于建筑物的最大尺寸.但是,这种算法人工约束条件较多,如地形坡度、建筑物最大尺寸、建筑物最低高度等,因而需要用户预先设置的参数复杂,在使用中降低了用户的易用性和算法的自动化水平[21 ] . ...
Fully convolutional networks for semantic segmentation
1
2014
... 基于特征的渐进式形态学特征滤波的主要过程为:在首次滤波之前引入了深度学习语义分割,先利用图像形态变换方法和图像色彩变换方法对原始数据集进行扩充,接着使用卷积神经网络和反卷积神经网络得出多维映射矩阵(即原始图像和轮廓的对应关系).整个网络分成两部分前半部分作用是特征提取,后半部分是上采样.特征提取过程每经过一个卷基层和一个池化层就生成一个尺度,包括原图尺度一共有5个尺度.上采样过程每上采样一次,就和特征提取部分对应的通道数相同尺度融合.依据损失函数不断调整最后得出多维映射矩阵并对原影像逐个像元进行二分类,如建筑物像元和非建筑物像元.由于卫星图像具有翻折和旋转不变性,在测试时,将图像进行水平、竖直、对角线3种翻折,每张图片预测5次,然后将5次的结果平均,最终实现建筑物区域边界的自动提取[22 ,23 ] .在实际应用中为了更好地分割地物,将点云内插成RGB图像像素点之间具有一对一的对应关系的深度图像,深度图像每个像素值表示的是高程信息.然后使用针对深度图像的卷积神经网络,利用大量带标注数据对网络进行训练,每个标注数据包括深度特征和RGB特征,然后再使用训练结果对实际数据分割提取[24 ] ,以建筑物为例边界提取率可以达到80%(图2 ).以此为基础将标记为建筑物的所有点云滤除,此为首次滤波;然后将首次滤波后的点云内插成粗略的高程影像,对高程影像分别沿X、Y方向求梯度,并按一定间隔统计局部区域的梯度均值,比较均值与预设阈值,若均值大于预设阈值,则将对应格网区域标记为复杂区域,反之将对应格网区域标记为简单城区;接着根据点云粗分类结果,逐一区域的按照地形类型标记采用不同的经验滤波参数选取一系列低点作为初始地面点,由这些点构建不规则三角网,再按照距离阈值和法线夹角阈值的规则逐步加入其余点,加密构建地面点三角网[25 ] ,以此为基础将点云初分为地面点、非地面点;最后在初滤波的点云基础上,综合利用前期地物语义分割和几何属性自动判定区域类型,如分为山地、居住地与城镇、植被等,并在此知识的指导下,利用针对不同类型区域的预设滤波方案进行二次滤波,同时基于地面点、非地面点及其联合分析,获得每个分割块内的特征指数与统计特征,赋予每个点一个分类置信度,根据不同置信度进一步优化滤波结果.两次滤波迭代既避免了因深度学习漏检导致滤波不全,也更充分利用冗余信息智能的判定地形,以更好地实现滤波参数自适应. ...
车载LiDAR点云滤波的改进不规则三角网加密方法
1
2016
... 基于特征的渐进式形态学特征滤波的主要过程为:在首次滤波之前引入了深度学习语义分割,先利用图像形态变换方法和图像色彩变换方法对原始数据集进行扩充,接着使用卷积神经网络和反卷积神经网络得出多维映射矩阵(即原始图像和轮廓的对应关系).整个网络分成两部分前半部分作用是特征提取,后半部分是上采样.特征提取过程每经过一个卷基层和一个池化层就生成一个尺度,包括原图尺度一共有5个尺度.上采样过程每上采样一次,就和特征提取部分对应的通道数相同尺度融合.依据损失函数不断调整最后得出多维映射矩阵并对原影像逐个像元进行二分类,如建筑物像元和非建筑物像元.由于卫星图像具有翻折和旋转不变性,在测试时,将图像进行水平、竖直、对角线3种翻折,每张图片预测5次,然后将5次的结果平均,最终实现建筑物区域边界的自动提取[22 ,23 ] .在实际应用中为了更好地分割地物,将点云内插成RGB图像像素点之间具有一对一的对应关系的深度图像,深度图像每个像素值表示的是高程信息.然后使用针对深度图像的卷积神经网络,利用大量带标注数据对网络进行训练,每个标注数据包括深度特征和RGB特征,然后再使用训练结果对实际数据分割提取[24 ] ,以建筑物为例边界提取率可以达到80%(图2 ).以此为基础将标记为建筑物的所有点云滤除,此为首次滤波;然后将首次滤波后的点云内插成粗略的高程影像,对高程影像分别沿X、Y方向求梯度,并按一定间隔统计局部区域的梯度均值,比较均值与预设阈值,若均值大于预设阈值,则将对应格网区域标记为复杂区域,反之将对应格网区域标记为简单城区;接着根据点云粗分类结果,逐一区域的按照地形类型标记采用不同的经验滤波参数选取一系列低点作为初始地面点,由这些点构建不规则三角网,再按照距离阈值和法线夹角阈值的规则逐步加入其余点,加密构建地面点三角网[25 ] ,以此为基础将点云初分为地面点、非地面点;最后在初滤波的点云基础上,综合利用前期地物语义分割和几何属性自动判定区域类型,如分为山地、居住地与城镇、植被等,并在此知识的指导下,利用针对不同类型区域的预设滤波方案进行二次滤波,同时基于地面点、非地面点及其联合分析,获得每个分割块内的特征指数与统计特征,赋予每个点一个分类置信度,根据不同置信度进一步优化滤波结果.两次滤波迭代既避免了因深度学习漏检导致滤波不全,也更充分利用冗余信息智能的判定地形,以更好地实现滤波参数自适应. ...
车载LiDAR点云滤波的改进不规则三角网加密方法
1
2016
... 基于特征的渐进式形态学特征滤波的主要过程为:在首次滤波之前引入了深度学习语义分割,先利用图像形态变换方法和图像色彩变换方法对原始数据集进行扩充,接着使用卷积神经网络和反卷积神经网络得出多维映射矩阵(即原始图像和轮廓的对应关系).整个网络分成两部分前半部分作用是特征提取,后半部分是上采样.特征提取过程每经过一个卷基层和一个池化层就生成一个尺度,包括原图尺度一共有5个尺度.上采样过程每上采样一次,就和特征提取部分对应的通道数相同尺度融合.依据损失函数不断调整最后得出多维映射矩阵并对原影像逐个像元进行二分类,如建筑物像元和非建筑物像元.由于卫星图像具有翻折和旋转不变性,在测试时,将图像进行水平、竖直、对角线3种翻折,每张图片预测5次,然后将5次的结果平均,最终实现建筑物区域边界的自动提取[22 ,23 ] .在实际应用中为了更好地分割地物,将点云内插成RGB图像像素点之间具有一对一的对应关系的深度图像,深度图像每个像素值表示的是高程信息.然后使用针对深度图像的卷积神经网络,利用大量带标注数据对网络进行训练,每个标注数据包括深度特征和RGB特征,然后再使用训练结果对实际数据分割提取[24 ] ,以建筑物为例边界提取率可以达到80%(图2 ).以此为基础将标记为建筑物的所有点云滤除,此为首次滤波;然后将首次滤波后的点云内插成粗略的高程影像,对高程影像分别沿X、Y方向求梯度,并按一定间隔统计局部区域的梯度均值,比较均值与预设阈值,若均值大于预设阈值,则将对应格网区域标记为复杂区域,反之将对应格网区域标记为简单城区;接着根据点云粗分类结果,逐一区域的按照地形类型标记采用不同的经验滤波参数选取一系列低点作为初始地面点,由这些点构建不规则三角网,再按照距离阈值和法线夹角阈值的规则逐步加入其余点,加密构建地面点三角网[25 ] ,以此为基础将点云初分为地面点、非地面点;最后在初滤波的点云基础上,综合利用前期地物语义分割和几何属性自动判定区域类型,如分为山地、居住地与城镇、植被等,并在此知识的指导下,利用针对不同类型区域的预设滤波方案进行二次滤波,同时基于地面点、非地面点及其联合分析,获得每个分割块内的特征指数与统计特征,赋予每个点一个分类置信度,根据不同置信度进一步优化滤波结果.两次滤波迭代既避免了因深度学习漏检导致滤波不全,也更充分利用冗余信息智能的判定地形,以更好地实现滤波参数自适应. ...
 , 刘文彬
, 刘文彬

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}