傅梦颖 , 张恒才, 王培晓
, 张恒才, 王培晓
FU Mengying, ZHANG Hengcai, WANG Peixiao
通讯作者:
收稿日期: 2019-01-16
修回日期: 2019-03-11
网络出版日期: 2019-05-25
版权声明: 2019 《地球信息科学学报》编辑部 《地球信息科学学报》编辑部 所有
基金资助:
作者简介:
作者简介:傅梦颖(1993-),女,安徽六安人,硕士生,研究方向为地理信息服务。E-mail: 1429137226@qq.com
展开
摘要
室内导航网络是行人导航、信息推荐和商业分析的基础。传统人工测绘或半自动提取的室内三维导航网络无法满足复杂室内空间结构高频变化需求。随着室内定位技术的不断发展,室内移动对象轨迹数据爆发式增长,为室内导航网络快速构建与变化监测更新提供了可能。本文提出一种基于移动对象轨迹的室内导航网络构建方法,在基于ST-DBSCAN的轨迹简化预处理基础上,提出了室内轨迹自适应栅格化算法,减弱栅格图像分辨率对导航网络提取的影响,有效避免廊道轨迹密度差异造成的导航网络拓扑连通失效,并通过CFSFDP自适应聚类算法自动识别楼层之间连通点,实现室内导航网络的快速构建。实验数据来源于上海图聚智能科技股份有限公司提供的某商城真实的室内移动对象轨迹数据,实验结果表明,与普适栅格化方法相比,本文提出的方法将导航网络构建准确率平均提高2.43%,拓扑正确度提高12.8%。
关键词:
Abstract
The indoor navigation network is the basis for pedestrian navigation, information recommendation, and business analysis. The traditional method of manual mapping or semiautomatic extraction of three-dimensional indoor navigation network cannot meet the requirement of high-frequency change of complex indoor space structures. With the continuous development of indoor positioning technology, there is an explosion of trajectory data of indoor moving objects, which provides a possibility for rapid construction and change monitoring of indoor navigation networks. This paper proposes a method of crowdsourcing construction of indoor navigation network based on the trajectory of moving objects. Based on trajectory simplification preprocessing using ST-DBSCAN, an indoor trajectory adaptive rasterization algorithm is proposed to reduce the influence of raster image resolution on the extraction of navigation networks. This approach effectively avoids the failure of navigation networks' topological connection that is caused by the difference of track trajectory density. Moreover, it automatically identifies the connection points between floors by the CFSFDP adaptive clustering algorithm to realize the rapid construction of indoor navigation networks. The experimental data is derived from the real indoor moving object trajectory data provided by Shanghai Palmap Science & Technology Co., Ltd. The experimental results show that, compared with the universal rasterization method, the proposed method improves the accuracy of navigation network construction by an average of 2.43% and improves the accuracy of topology by 12.8%.
Keywords:
室内空间是人类活动的主要空间,例如办公楼、购物中心、医院、机场、地铁站等,据研究表明人类87%左右的时间都在室内空间移动[1]。室内导航网络是行人导航、个性化信息推荐和商业分析的基础[2,3]。与交通路网相比,室内空间更为复杂,导航网络提取难度较大,一方面,室内空间属于三维空间,室内三维空间结构复杂,如封闭空间、半封闭空间等,室内三维空间实体众多,如房间、墙壁、门、窗、走廊、电梯、楼梯等,室内三维空间约束多样,如连通约束、障碍约束等,三维拓扑连通关系构建是室内导航网络构建的难点之一;另一方面,室外路网结构相对固定,室内廊道结构狭窄多变,且在一些特定大型购物广场类室内空间,廊道结构变化频率较高。室内导航网络提取多采用人工现场测绘或半人工CAD平面图提取[4,5]等方法,虽然该类方法可以保证导航路网提取精度,但室内导航网络时效性无法满足要求,进而影响室内导航网络应用的准确性构建。
近年来,随着室内定位技术迅猛发展,如WiFi定位、射频识别(Radio Frequency Identification, RFID)定位、蓝牙或NFC(Near Field Communication)定位、伪卫星定位、ZigBee定位、UWB(Ultra-Wideband)定位、超声波定位、影像匹配与条码定位及地磁定位等,内置定位模块的移动终端如智能手机、平板电脑、PDA等的用户规模不断扩大,移动互联网的不断发展,室内位置服务应用不断增多,如在线导航、基于位置的社交网络、基于位置的广告推送[3]等,室内空间产生了海量移动对象轨迹数据,为室内导航网络快速构建与变化检测更新提供了一种新的可能。
目前,基于移动对象轨迹数据构建导航网络的研究多集中在室外空间,依据方法模型的不同,分为轨迹聚类法、增量融合法、节点连接法、栅格化法等。轨迹聚类法[6,7]是基于同一路段轨迹具有的空间相似性和邻近性,运用聚类算法对轨迹点、线聚类,实现路网提取。增量融合法[8,9,10]首先初始化空白地图,逐次将车辆轨迹线添加进空的道路地图上,逐步构造和细化道路图。节点连接法[11]的关键在于交叉口识别[12],通常基于车辆轨迹在转弯处产生的速度和方向变化特征识别交叉口位置,通过节点连接形成路网地图。栅格化法[13,14,15]首先将轨迹点转换为二值化栅格图像,然后运用图像细化算法提取道路骨架线,最后生成矢量路网地图。
室内移动对象轨迹产生于模糊的自由空间(包括公共廊道、房间等),且室内移动对象具有移动随意性,对基于移动对象轨迹构建室内导航网络提出了很大挑战。鉴于此,本文提出一种室内导航网络众包构建方法,首先基于轨迹速度信息和ST-DBSCAN对移动对象轨迹进行简化,去除轨迹停留点信息;接着,通过改进KNN室内轨迹自适应栅格化算法生成室内轨迹图像,并采用数学形态学优化和细化方法,实现室内二维平面导航网络构建;最后,通过拓扑连通区域识别规则和CFSFDP(Clustering by Fast Search and Find of Density Peaks)自适应聚类算法识别出楼层连通点,实现楼层连接并与平面导航网络融合,实现室内三维导航网络构建。
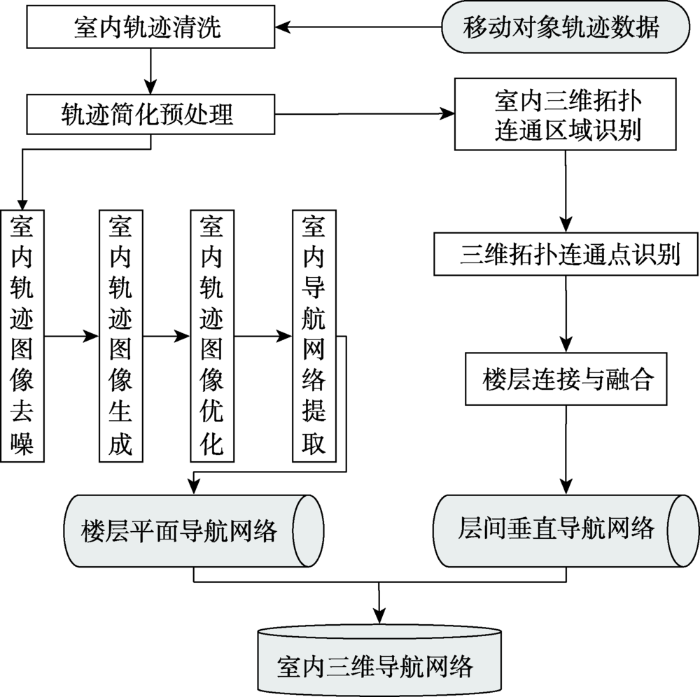
基于移动对象轨迹构建室内导航网络的算法流程(图1)为:① 室内轨迹预处理,根据轨迹速度信息及ST-DBSCAN算法简化轨迹停留点信息; ② 室内二维平面导航网络构建,包括室内轨迹去噪、室内轨迹图像生成、室内轨迹图像优化处理、室内平面二维导航网络提取4个步骤;③ 室内三维导航网络构建,根据室内三维拓扑连通区域识别规则和CFSFDP自适应聚类算法提取出楼层连通点,实现室内三维导航网络自动构建。
图1 基于移动对象轨迹的室内导航网络构建方法
Fig. 1 Method for constructing indoor navigation networks based on moving object trajectory
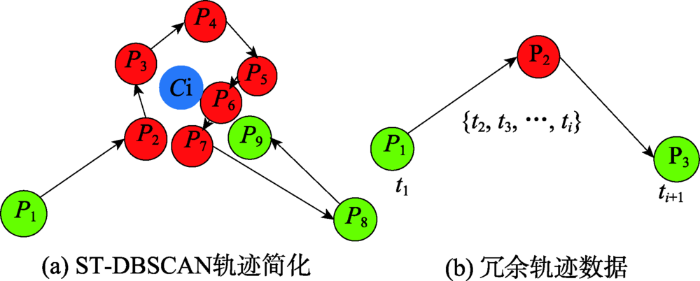
室内移动对象轨迹包含较多停留点信息,主要分为2种情形[16]:① 移动对象在同一位置停留较长时间,其轨迹会出现大量时间连续且位置不变的轨迹点;② 移动对象在一个位置及其周围游荡,其轨迹会出现小范围聚集,形成高密轨迹点簇。本文提出了基于ST-DBSCAN和轨迹速度信息的轨迹简化预处理方法,具体步骤为:首先利用ST-DBSCAN算法[17]识别出每条轨迹连续时间序列下形成的高密轨迹点簇,并以簇集质心
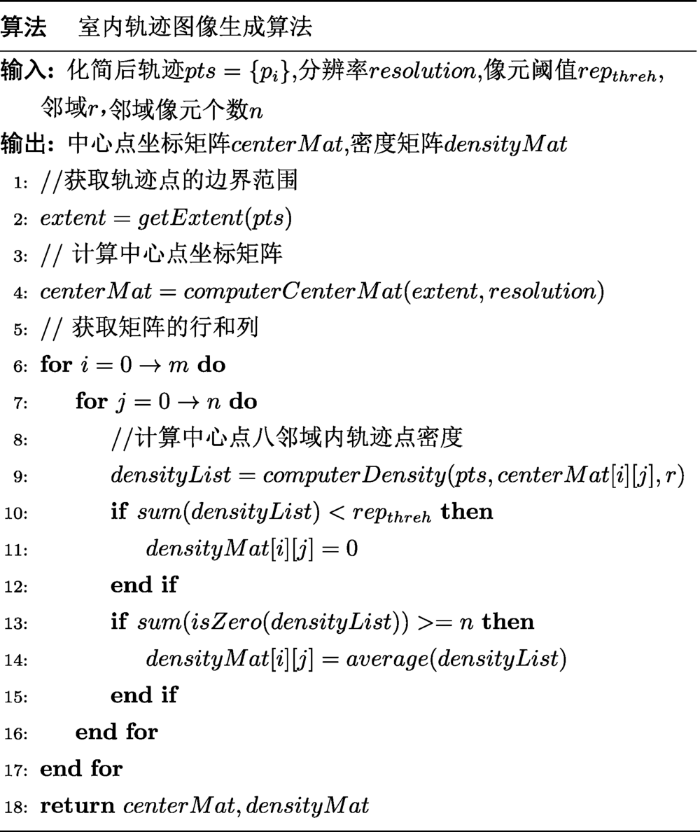
2.2.1 室内轨迹图像生成算法
经过ST-DBSCAN轨迹简化后轨迹点更集中于廊道,但仍残留不少噪声点,在生成轨迹图像之前首先需要进一步过滤噪声,这里通过栅格过滤方式进一步去噪。
以点
本文提出一种改进KNN室内轨迹自适应栅格化算法,根据栅格邻域内点的个数和密度,自动调节栅格化时统计阈值,克服不同廊道区域轨迹密度差异所导致的提取误差,增强轨迹稀疏区域的拓扑连通性,并有效克服噪声的影响。遍历所有栅格像元
图3 不同阈值下的自适应栅格化结果
Fig. 3 Adaptive rasterization results under different thresholds
式中:
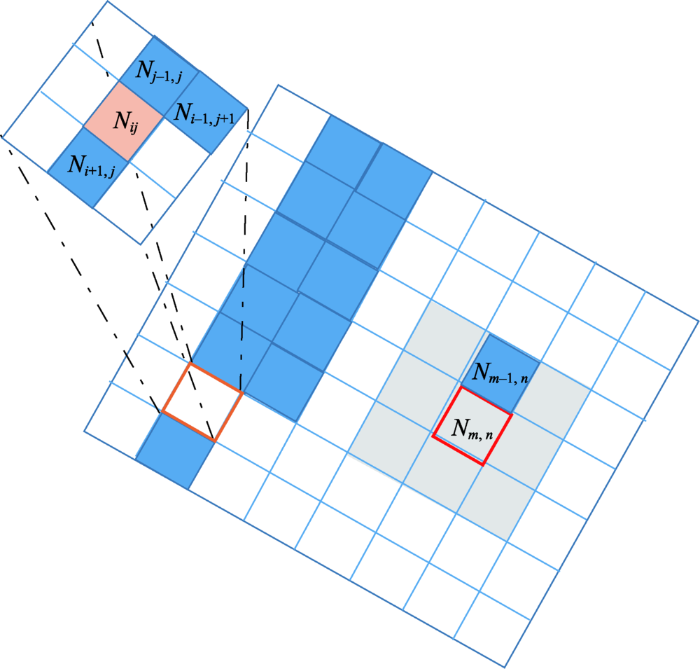
图5为室内轨迹图像生成过程示意图,像元
邻域像元构成的滑动窗口可根据拓扑不连通区域的面积大小自由调整,窗口边长不应超过研究区域最大路宽。若噪声多表现为连续的噪声像元,则可以增加邻域像元中不为0的像元个数,降低噪声像元被处理的概率。这种栅格化方法能够减弱栅格图像分辨率的选择对路网提取结果的影响,能够有效避免廊道轨迹密度差异而导致导航网络拓扑不连通的问题,同时能够较好的克服噪声的影响。
轨迹数据自适应栅格化后需要进行二值化,得到二值化室内轨迹栅格图像。设定二值化阈值
2.2.2 室内轨迹图像优化算法
改进KNN自适应栅格化得到的室内轨迹图像连通性较好,但仍存在一些残留噪声、道路轻微裂隙、边缘锯齿等现象,这些会影响室内导航网络提取精度,需要对图像进行优化。本文采用数学形态学基本运算对室内轨迹图像进行优化,包括腐蚀、膨胀、开运算、闭运算等,在室内轨迹图像优化处理过程中通过结合多种运算以达到理想效果。
(1)去除噪声。噪声在室内轨迹图像里表现为大小不等的图斑,有的独立存在,有的与道路紧密粘连。去噪采用形态学腐蚀操作(式(3))实现,本文采用图6(a)所示的结构元素,记为B,其操作过程如下:在B中定义一个原点
(2)填补裂隙。自适应栅格化得到的室内轨迹图像可能仍存在少量道路裂隙,可采用形态学膨胀运算进行裂隙填补。如式4所示,其原理是当B中原点
2.2.3 室内平面导航网络提取算法
室内平面导航网络提取分为2步:① 对优化处理后的轨迹图像进行细化,即在保持图像的形状、拓扑结构不变的情况下,提取出图像的中心像元;② 将细化结果转换成矢量数据,构成包含路段和结点信息的室内导航网络。
本文采用数学形态学细化算法对室内轨迹图像进行细化。数学形态学细化算法利用击中击不中变换,通过一系列结构元素对图像迭代细化,不断删除被击中的像素,直到结果不再变化,使用结构元素B对图像A细化处理定义为:
为保证细化结果的对称性,结构元素序列中应包含多种方向的结构元素。本文采用常用的结构元素集合
图8 形态学细化采用的结构元素序列
Fig. 8 Sequences of structural elements used in morphological refinement
首先使用
最后将室内轨迹图像细化结果转换成矢量数据就得到了室内导航网络,矢量化过程中需要考虑细化结果残留噪声、细化后的道路细碎分支、矢量道路平滑等,实现噪声和细碎道路过滤、路段平滑等。
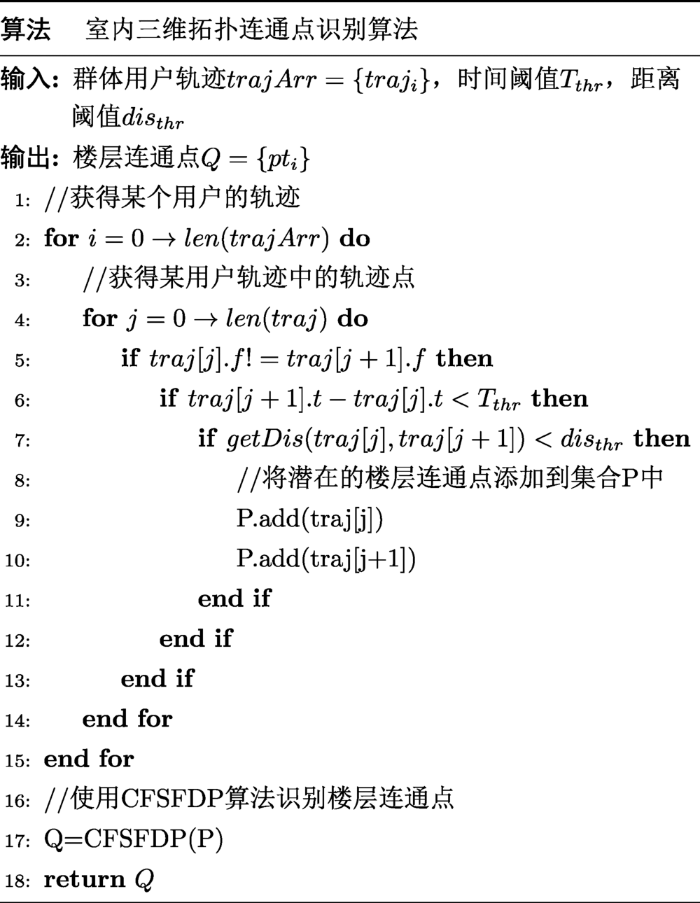
本文通过移动对象轨迹数据自动识别出楼层连通点,实现楼层自动连接,生成室内三维导航网络。首先基于化简后的用户轨迹识别出潜在三维拓扑连通区域,其次,从潜在连通区域识别出拓扑连通点,最后以连通点连接各楼层。具体步骤如下:
(1)连通区域识别步骤如下:识别出每条原始轨迹中楼层属性
如某对轨迹点的位置差在设定的距离阈值
(2)从识别出的楼层连通区域中识别出
(3)以位置差为约束,将跨楼层对应连通点连接起来,并建立各楼层连接点与最近道路的连接,生成连接道路。
室内三维拓扑连通点识别伪代码如图9所示。
图9 室内三维拓扑连通点识别算法
Fig. 9 Algorithm for identifying3-D "indoortypological connections
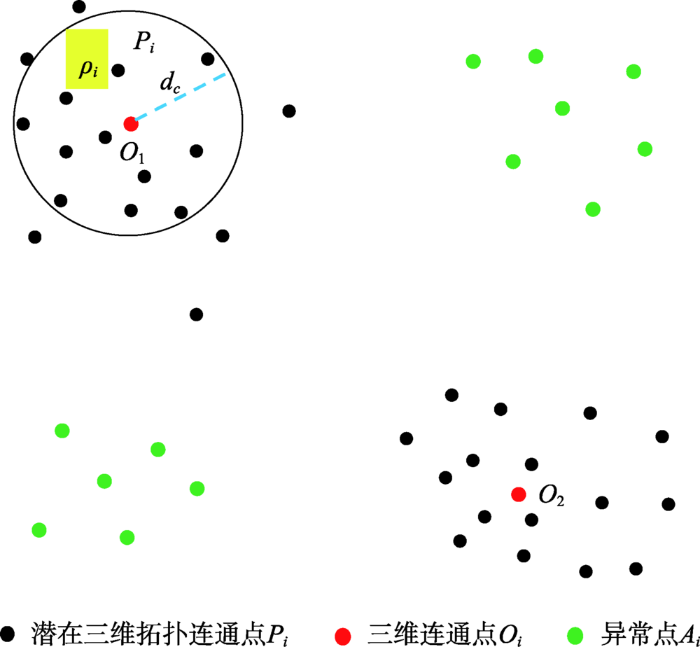
三维拓扑连通点需要采用聚类算法从步骤(1)识别出的分布于不同区域的三维拓扑连通区域中提取得到。此时,连通区域点密度越大,越接近楼层连通设施的实际位置。常见的基于划分的聚类算法(如K-Means)需事先指定聚类的个数,而楼层连通设施数量是未知的,限制了算法的使用;基于密度的聚类算法(如DBSCAN)在聚类过程中需要指定2个超参数,经验化程度较高,且得到的结果是聚类簇集,需要人为指定连通点的位置,通常取均值位置,均值通常会弱化轨迹点之间的密度差异,而将所有轨迹点同等对待,容易造成连通点位置偏移。
CFSFDP(Clustering by Fast Search and Find of Density Peaks)算法[19]是一种结合基于密度和基于划分的新颖聚类算法,该算法的核心思想在于聚类中心的刻画,且仅需指定一个参数即截断距离dc,即可自动生成聚类中心的个数及位置。聚类中心同时具有两个特点,与本文楼层连通点识别思想不谋而合:① 局部密度最大,被不超过自身密度的邻居点包围;② 与局部密度更大的样本点之间的距离相对较大。另外,定位误差的存在会导致道路上而非楼层连通区域的轨迹点也存在层间跳跃的情况,产生异常点。由于CFSFDP算法在识别过程中对密度敏感,因此具有良好的抗噪性能。因此本文采用CFSFDP算法从楼层连通区域中识别出楼层连通点。
对于数据集
式中:
根据样本点
式中:
如图10所示,楼层连通区域中每一个点
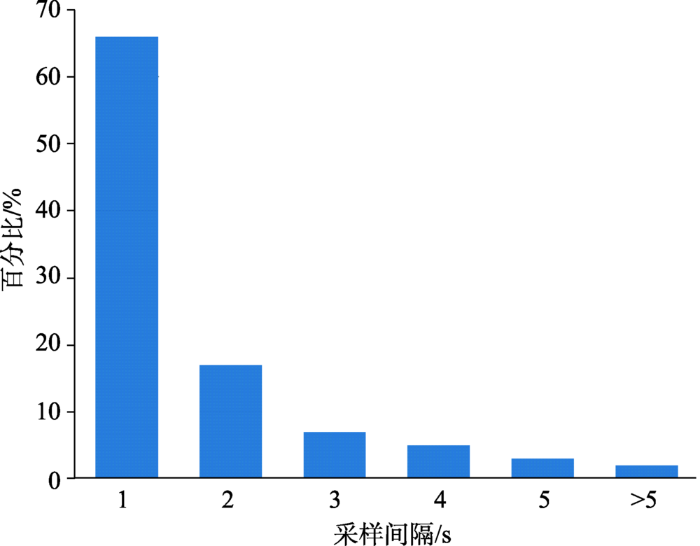
实验数据来自于某商城2天的移动对象蓝牙定位数据,有效轨迹约4000条,总轨迹点逾400万个,数据采样间隔1~10 s不等,如图11所示,采样间隔为1~2 s的轨迹点占比80%以上,数据定位精度为2~3 m,数据包括用户设备编号、定位时间、x坐标、y坐标及所在楼层编号5个字段(表1)。
表1 移动用户轨迹实例
Tab. 1 Samples of user records
| mac | Time | x | y | Floor |
|---|---|---|---|---|
| 000C437*** | 2017/11/910:00:01 | 135946*** | 45097*** | 1 |
| 000C437*** | 2017/11/910:00:03 | 135946*** | 45097*** | 1 |
| 000C437*** | 2017/11/910:00:04 | 135946*** | 45097*** | 1 |
| …… | …… | …… | …… | …… |
| 000C437*** | 2017/11/912:20:44 | 135946*** | 45097*** | 2 |
图11 某商城移动对象轨迹数据采样间隔
Fig. 11 Sampling interval of trajectory data of moving objects in a shopping mall
选取F1、F2楼层作为试验区域,原始轨迹通过室内蓝牙定位技术采集得到,由于手机终端信号不稳定、人为关闭信号接收、用户停留等原因[20],原始轨迹存在异常、漂移、重复等现象,需要进行数据清洗。主要存在3种情形:① 时间异常轨迹点,即同一用户在同一时间存在大于一个轨迹点,只保留一个轨迹点;② 漂移轨迹点,即连续时间序列中个别偏移过大的轨迹点,设置偏移距离阈值,将偏移距离大于阈值的轨迹点视为离群值,进行删除;③ 冗余轨迹点,同一用户轨迹序列中时间相邻但坐标相同的轨迹点,进行合并且只保留一个。
采用文献[21]提出的缓冲区检测方法来评价本文平面导航网络提取精度。对室内原始导航网络分别建立以0.2、0.5、0.7 m为半径的缓冲区,统计落入缓冲区内的路段长度并计算准确率、召回率。同时,统计实验结果中拓扑正确道路数量与拓扑错误道路数量,统计百分比,计算拓扑正确度。
式中:P表示准确率;R表示召回率;
Kuntzsch等[15]采用基于核密度估计的方法(Kernel Density Estimation Method,KDE)重构路网,即在二维空间中对轨迹数据进行栅格化,构建KDE直方图,根据核密度估计的聚类特性提取出道路网络栅格图像,对栅格图像进行骨架化,计算出代表道路网络几何图形的道路中心线。本文将该方法与自适应栅格化法进行二维导航网络实验对比。通过计算三维拓扑连通点与实际楼层连通设施的距离,作为三维导航网络的评价指标,其中,楼层连通设施位置取门中心位置。
3.3.1 二维平面室内导航网络构建
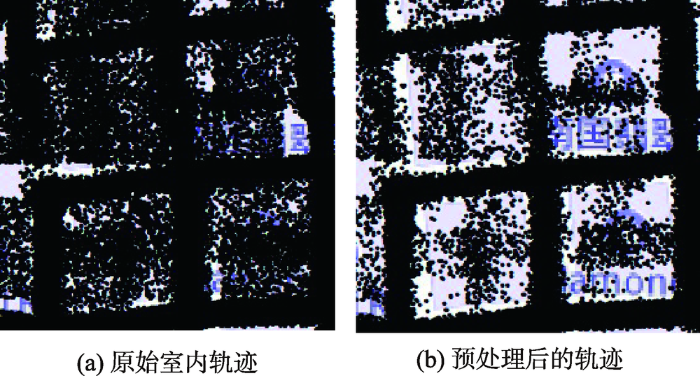
图12(a)、12(b)是原始轨迹及预处理后的结果,可以看出,由于移动对象停留主要集中于设施区域,因此对所有轨迹进行预处理后产生了明显的区域密度差异,即设施区域轨迹点密度较低,廊道区域轨迹点密度较高。
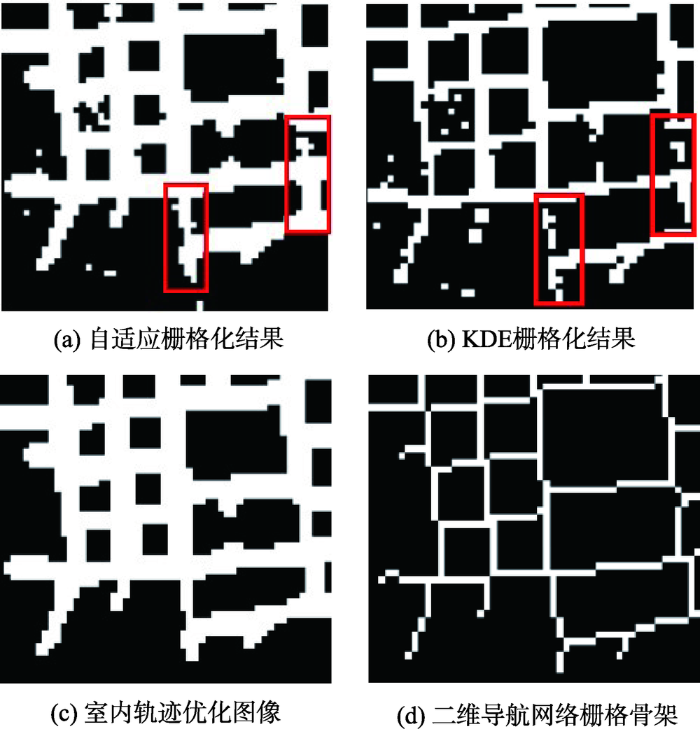
图13(a)为8邻域像元中像元值不为0的像元个数
图13 室内二维导航网络提取过程
Fig. 13 Processes of extracting a 2-Dindoor navigation network
采用基于KDE的方法[15]和本文方法得到的室内平面导航网络结果评价如表2所示,当缓冲区半径分别取值0.2 m、0.5 m、0.7 m时,本文方法导航网络准确率分别达到28.2%、64.4%、80.5%,相比KDE法分别提高1.2%、3.4%、2.7%,准确率平均提高2.43%;本文方法导航网络召回率分别达到25.7%、58.7%、73.3%,相比KDE法分别提高0.9%、2.6%、1.7%,召回率平均提高1.73%。拓扑正确率提高12.8%。由此可见,本文方法能够有效提高室内导航网络构建的几何精确度和拓扑正确度。
表2 实验结果评价
Tab. 2 Evaluation of the experiment result (%)
| 导航网络缓冲区 | 拓扑 正确性 | ||||||
|---|---|---|---|---|---|---|---|
| P(0.2 m) | R(0.2 m) | P(0.5 m) | R(0.5 m) | P(0.7 m) | R(0.7 m) | ||
| 核密度估计法 | 27 | 24.8 | 61 | 56.1 | 77.8 | 71.6 | 76.7 |
| 本文方法 | 28.2 | 25.7 | 64.4 | 58.7 | 80.5 | 73.3 | 89.5 |
3.3.2 三维室内导航网络构建
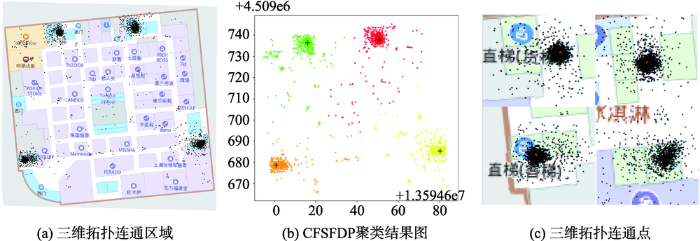
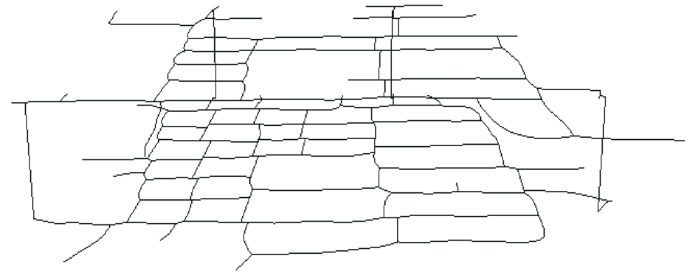
图15(a)是按照2.3节方法识别出的楼层连通点集,图中可以看出,高密点集总共有4处,分布于楼层的四周,图15(b)、15(c)是采用CFSFDP算法识别出的三维拓扑点及与平面图叠加的效果,可以看出4个三维连通点均位于电梯位置的附近,4个三维拓扑点与电梯实际位置的距离分别为2.14 、2.93、2.57、2.01 m,准确度较高。以这4个三维拓扑点连接F1、F2楼层,图16是垂直导航网络并与平面导航网络融合后生成的室内三维导航网络结果。由此可见,本文提出的室内导航网络构建方法能够较好地提取该商场的导航网络结构。
图15 楼层连通点识别及聚类结果
Fig. 15 Identification of floor connections, and clustering result
针对传统室内导航网络构建方法在时效性方面的不足,本文提出一种室内三维导航网络快速众包构建方法。首先,提出基于ST-DBSCAN的室内轨迹简化预处理方法,去除轨迹停留点信息;接着,通过改进KNN室内轨迹自适应栅格化算法,实现室内二维平面导航网络的提取;最后,通过CFSFDP自适应聚类算法识别出楼层三维连通点,实现室内三维导航网络的快速构建。实验结果表明,与基于核密度估计的栅格化方法相比,本文提出的方法将导航网络构建准确率平均提高1.83%,拓扑正确度提高12.8%。能够为传统室内导航网络构建方法提供有效补充,为室内导航网络快速变化检测更新提供支持。室内定位数据误差会影响本研究导航网络提取效果,尤其在轨迹密度较低区域,导航网络提取结果存在较大误差,未来需要进一步提高本研究在稀疏室内轨迹定位数据的适用性。
致谢:上海图聚智能科技股份有限公司为本研究提供了某商城真实室内定位数据支持,在此表示真诚地感谢!
The authors have declared that no competing interests exist.
| [1] |
The National Human Activity Pattern Survey (NHAPS): A resource for assessing exposure to environmental pollutants [J]. |
| [2] |
绝对空间定位到相对空间感知的行人导航研究趋势 [J].Pedestrian navigation research trend: From absolute space to relative space-based approach [J]. |
| [3] |
室内用户语义位置预测研究 [J].Semantic location prediction of indoor users [J]. |
| [4] |
基于中轴变换算法的室内外一体化导航路网自动生成方法 [J].Automatic generation method of indoor and outdoor integrated navigation network based on mid-axis transformation algorithm [J]. |
| [5] |
一种易于更新的室内导航路网构建方法 [J].An easy-to-update method for building indoor navigation network [J]. |
| [6] |
A novel approach for generating routable road maps from vehicle GPS traces [J]. |
| [7] |
Segmentation of trajectories on nonmonotone Criteria [J]. |
| [8] |
Mining trajectory data and geotagged data in social media for road map inference [J]. |
| [9] |
A road map refinement method using delaunay triangulation forbig trace data [J].https://doi.org/10.3390/ijgi6020045 URL [本文引用: 1] 摘要
With the rapid development of urban transportation, people urgently need high-precision and up-to-date road maps. At the same time, people themselves are an important source of road information for detailed map construction, as they can detect real-world road surfaces with GPS devices in the course of their everyday life. Big trace data makes it possible and provides a great opportunity to extract and refine road maps at relatively low cost. In this paper, a new refinement method is proposed for incremental road map construction using big trace data, employing Delaunay triangulation for higher accuracy during the GPS trace stream fusion process. An experiment and evaluation were carried out on the GPS traces collected by taxis in Wuhan, China. The results show that the proposed method is practical and improves upon existing incremental methods in terms of accuracy.
|
| [10] |
基于车辆轨迹大数据的道路网更新方法研究 [J].https://doi.org/10.7544/issn1000-1239.2016.20160610 URL Magsci [本文引用: 1] 摘要
众源轨迹的泛在、实时特性,使其成为道路信息快速获取与更新的重要途径.针对矢量道路数据的变化检测与更新问题,提出了一种基于车辆轨迹大数据的道路网快速变化发现与更新方法.1)以道路弧段为基本单元构建缓冲区,根据道路变化信息类型及表现形式,运用轨迹运动几何信息(方向、转角)与交通语义信息(速度、流量),对道路变化信息进行检测、分类,确定道路变化类型;2)将道路变化类型推断与增量信息提取相结合,分别运用Delaunay三角网、交通流时间序列分析提取增量信息;3)根据变化类型进行增量信息融合.运用深圳市出租车GPS轨迹数据进行实验分析,结果表明:该方法相比常规方法能正确判断道路变化类型、区分真实变化与语义变化,增量信息精度提高约18%,且适于图层级的批处理快速更新.
Research on road network renewal method based on vehicle trajectory big data [J].https://doi.org/10.7544/issn1000-1239.2016.20160610 URL Magsci [本文引用: 1] 摘要
众源轨迹的泛在、实时特性,使其成为道路信息快速获取与更新的重要途径.针对矢量道路数据的变化检测与更新问题,提出了一种基于车辆轨迹大数据的道路网快速变化发现与更新方法.1)以道路弧段为基本单元构建缓冲区,根据道路变化信息类型及表现形式,运用轨迹运动几何信息(方向、转角)与交通语义信息(速度、流量),对道路变化信息进行检测、分类,确定道路变化类型;2)将道路变化类型推断与增量信息提取相结合,分别运用Delaunay三角网、交通流时间序列分析提取增量信息;3)根据变化类型进行增量信息融合.运用深圳市出租车GPS轨迹数据进行实验分析,结果表明:该方法相比常规方法能正确判断道路变化类型、区分真实变化与语义变化,增量信息精度提高约18%,且适于图层级的批处理快速更新.
|
| [11] |
A comparison and evaluation of map construction algorithms using vehicle tracking data [J]. |
| [12] |
Complex road intersection modelling baded on low-frequency GPS track data [J].https://doi.org/10.5194/isprs-archives-XLII-2-W7-23-2017 URL [本文引用: 1] 摘要
It is widely accepted that digital map becomes an indispensable guide for human daily traveling. Traditional road network maps are produced in the time-consuming and labour-intensive ways, such as digitizing printed maps and extraction from remote sensing images. At present, a large number of GPS trajectory data collected by floating vehicles makes it a reality to extract high-detailed and up-to-date road network information. Road intersections are often accident-prone areas and very critical to route planning and the connectivity of road networks is mainly determined by the topological geometry of road intersections. A few studies paid attention on detecting complex road intersections and mining the attached traffic information (e.g., connectivity, topology and turning restriction) from massive GPS traces. To the authors' knowledge, recent studies mainly used high frequency (1鈥塻 sampling rate) trajectory data to detect the crossroads regions or extract rough intersection models. It is still difficult to make use of low frequency (20-100鈥塻) and easily available trajectory data to modelling complex road intersections geometrically and semantically. The paper thus attempts to construct precise models for complex road intersection by using low frequency GPS traces. We propose to firstly extract the complex road intersections by a LCSS-based (Longest Common Subsequence) trajectory clustering method, then delineate the geometry shapes of complex road intersections by a K-segment principle curve algorithm, and finally infer the traffic constraint rules inside the complex intersections.
|
| [13] |
Map inference in the face of noise and disparity [C]. |
| [14] |
Geometrical characteristics extraction and accuracy analysis of road network based on vehicle trajectory data [J]. |
| [15] |
Generative models for road network reconstruction [J].https://doi.org/10.1080/13658816.2015.1092151 URL [本文引用: 3] 摘要
This work aims at the inference of traffic networks from GPS trajectories. We perform geometry and topology reconstruction of the network in a multistep process. Our main contributions are the formulation of an explicit intersection model with a score function that accounts for consistency with the raw tracking data, as well as for a topology prior and the search for the best model by maximization of this score function using a Markov chain Monte Carlo sampler. We demonstrate the viability of our model-based approach with experiments on GPS data sets of varying size and data quality, followed by a comparison with results achieved by alternative, heuristic approaches.
|
| [16] |
Mining user similarity based on location history [C]. |
| [17] |
ST-DBSCAN: An algorithm for clustering spatial-temporal data [J]. |
| [18] |
Scalable, distributed, real-time map generation [J].https://doi.org/10.1109/MPRV.2006.83 URL [本文引用: 1] 摘要
In this application, many vehicles participate in the collection, processing, and dissemination of data to automatically generate digital road maps. Details about new roads and the modification or closure of existing roads must be incorporated into the databases in a timely fashion. Mapping organizations obtain data about road network changes from various sources, including local authorities and building contractors, but this data tends to be highly inaccurate. To simplify mapmaking process, vehicles could use their computational resources to directly generate accurate map data. We envisage vehicles on the road network forming a wide-scale mobile sensing and computing platform. Toward that goal, we've developed an algorithm for keeping digital maps up-to-date, using ordinary vehicles making normal journeys rather than fleets of dedicated probe vehicles. However, further development is required to address several remaining challenges, including the choice of architecture to support the algorithm
|
| [19] |
Machine learning. Clustering by fast search and find of density peaks [J]. |
| [20] |
Effective Similarity search on indoor moving-object trajectories [C]. |
| [21] |
Integration of GPS traces with road map [C]. |

/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}