Algorithm based on Weighted Constraints for Reconstructing the Point Cloud Surface of Single-Building
WANG Senyuan1, , CAI Guorong2, 3, WANG Zongyue2, WU Yundong2, 3, *,
1. School of Science, Jimei University, Xiamen 361021, China2. School of Computer Engineering, Jimei University, Xiamen 361021, China3. Fujian Collaborative Innovation Center for Big Data Applications in Governments, Fuzhou 350003, China
Building reconstruction based on 3D point cloud data has broad application prospects in fields such as high precision urban mapping and virtual reality. Due to the diverse geometry of buildings, there are widespread problems in traditional reconstruction algorithms, e.g., slow computation speed, low fitting precision, and incompleteness of building structures. Thus, with single-building as the research object, this paper proposed an algorithm based on weighted constraints for reconstructing point cloud surfaces. By fully considering each point’s contribution to the fitting plane during the surface initialization process, the proposed algorithm, which is based on regular sets, simultaneously optimizes the error of adaptively weighted fitting and the smoothness of neighbor structures. The algorithm was applied to the 3D point clouds of various buildings. Results showed that, compared with conventional building reconstruction strategies, the weighted-constraints based algorithm of this study can design adaptive weights according to different types of point clouds, and can choose the optimal weight for model fitting. In cases where the point cloud data contain high noise and low accuracy, the proposed algorithm can help generate more accurate surface models for single-building.
Keywords:3D reconstruction of single-building
;
point cloud surface fitting
;
weighted constraint
;
regular set
;
Lidar point clouds
;
UAV
WANGSenyuan, CAIGuorong, WANGZongyue, WUYundong. Algorithm based on Weighted Constraints for Reconstructing the Point Cloud Surface of Single-Building[J]. Journal of Geo-information Science, 2019, 21(5): 654-662 https://doi.org/10.12082/dqxxkx.2019.180661
基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面。这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息。Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间。改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况。在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果。刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法。
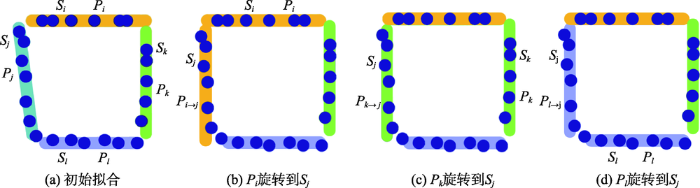
二值指示矢量集合[χi→j,…],i,j=1,2,…表示最终的有效模型集,即正则集。由于建筑物拓扑结构的复杂性,需根据结构相似性分组选择正则集,因此引入指示变量χi Є {0,1},χi表示一组模型中变换的源基元,所以指示变量χi=max j χi→j。此算法将正则集的选择问题转换为最小化能量函数的问题。算法的优化过程同时考虑数据项Edata、非正则项Eirr*和空间平滑项Espat,能量最小化公式为式(1):
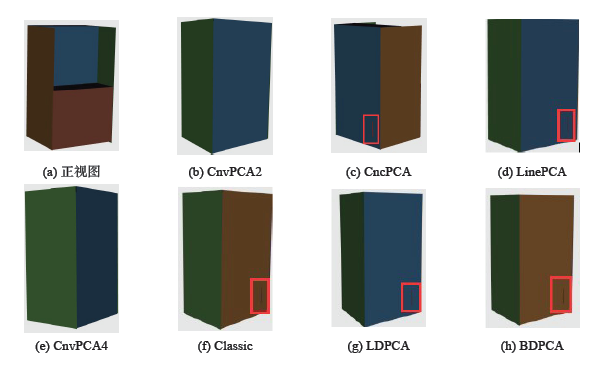
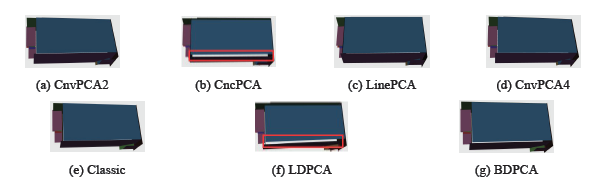
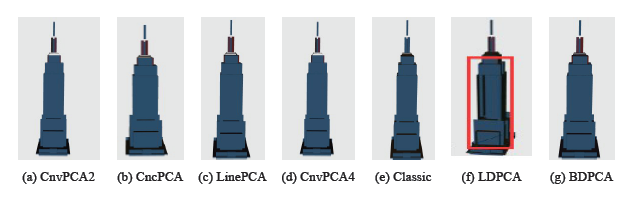
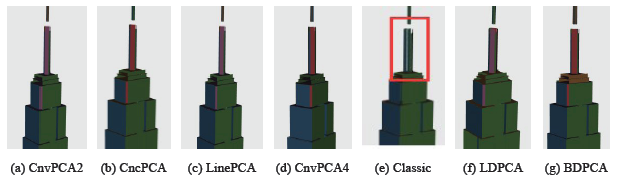
根据点云数据特点的不同,可采用以下几种典型加权函数。根据原始正则集的重建算法,其权重函数可由式(5)表示二次凸型加权主成分分析曲线(Convexity Principal Component Analysis,CnvPCA2)。
(5)
比较曲线的曲率,本文在式(5)的基础上提出函数f=(х4-1)2,其曲率大于式(5),用四次凸型加权主成分分析曲线(Convexity Principal Component Analysis,CnvPCA4)表示,同时参考直线型函数f=|-|х|+1|,用线型加权主成分分析曲线(Line Principal Component Analysis,LinePCA)表示,此外比较曲线弧向下弯曲的函数f=|х2-2|х||+1(凹型加权主成分分析曲线(Concavity Principal Component Analysis,CncPCA)),分析权重函数的曲率对重建效果的影响。
A new voronoi-based surface reconstruction algorithm
1
1998
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
1
2009
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
A new voronoi-based surface reconstruction algorithm
1
1998
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
Three dimension alpha shapes
1
1994
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
Kamvy. A new voronoi-based surface reconstruction algorithm
1
1998
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
Knowledge-driven ultracsonic three-dimensional organ modeling
1
1985
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
An adaptive subdivision method for surface fitting from sampled data
1
1986
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
车载激光扫描数据中建筑物立面快速提取
1
2018
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
车载激光扫描数据中建筑物立面快速提取
1
2018
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
Li DAR 点云数据的二面角滤波算法
1
2018
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
Li DAR 点云数据的二面角滤波算法
1
2018
... 基于网格结构的表面重建[1,2]是表面平滑重建中常用的算法,如The Power Crust法[3]、A-Shape法[4]、R-Graphs法[5]等,通过对点云进行Delaunay三角剖分,然后根据一定的拓扑准则提取点云的三角面片来重建物体表面.这类方法能构造一致的网格拓扑结构,但由于采用四面体剖分来搜索网格,因此其速度慢、效率低,且依赖于与点位置相关的定向法线和其他特定的测量信息.Brinkley[6]、Schmitt等[7]对上述直接进行空间三角剖分的方法进行了改进,通过将点云投影到二维切平面,对投影点进行Delaunay三角化后还原到三维空间.改进后的算法虽然能加快网格化速度,但从二维点的拓扑结构还原到三维空间时会出现结构错乱、网格不一致的情况.在此基础上,邵磊等[8]将点云数据投影到二维影像,并结合建筑物自身的几何特征进行提取,该方法明显提高了数据处理效率和模型立面的准确率,但面对低矮建筑物中具有相似结构的地物时,仍会出现错误和模型不完整的结果.刘凯斯等[9]针对复杂环境低矮建筑物问题提出二面角滤波法. ...
 , 蔡国榕
, 蔡国榕


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}