回波强度约束下的无人机LiDAR点云K-means聚类滤波
Filtering UAV LiDAR Point Cloud with K-means Clustering under the Constraint of Echo Intensity
回波强度约束下的无人机LiDAR点云K-means聚类滤波 |
| 李沛婷, 赵庆展, 陈洪 |
|
Filtering UAV LiDAR Point Cloud with K-means Clustering under the Constraint of Echo Intensity |
| LI Peiting,ZHAO Qingzhan,CHEN Hong |
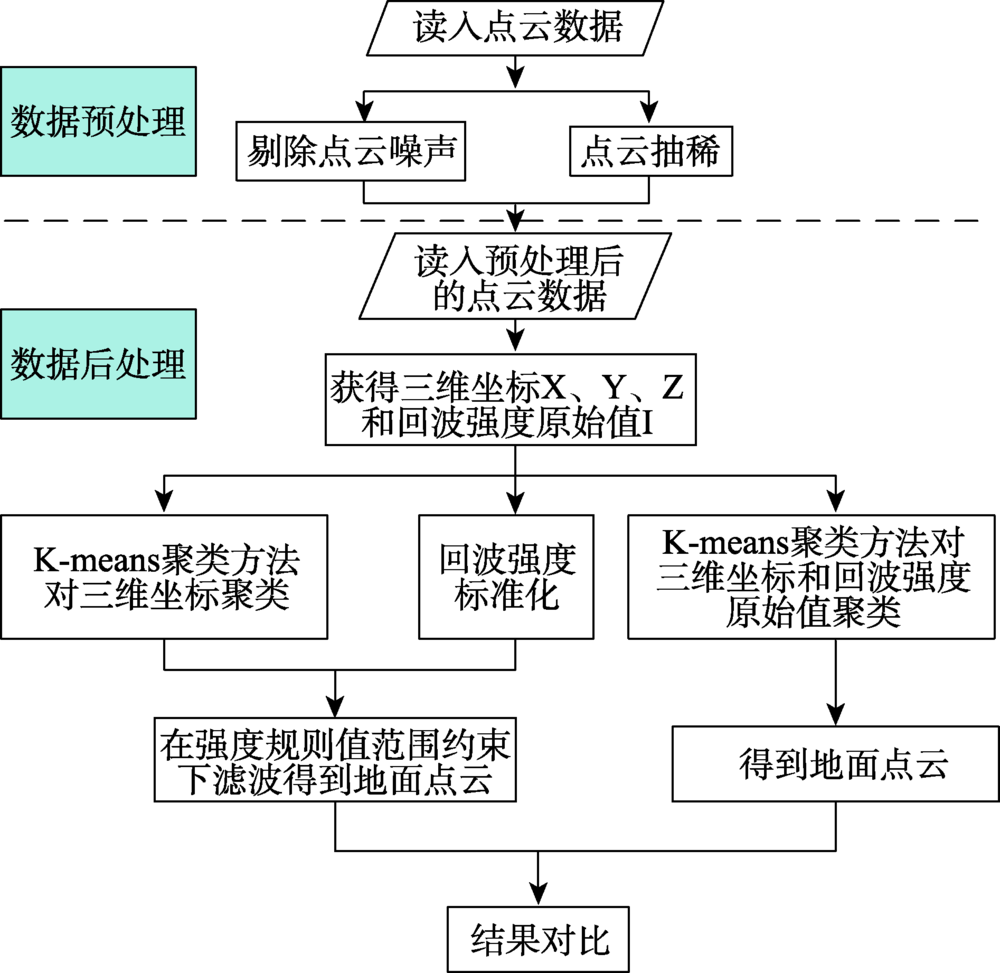
| 图1 机载LiDAR在回波强度值约束下的K-means点云聚类滤波方法技术流程图 |
| Fig.1 Process flow chart of filtering by K-means clustering under constraints of point clouds′ echo intensity values |
|
|