1 引言
洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] 。洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一。洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] 。遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息。灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大。遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] 。
卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] 。近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] 。无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] 。无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] 。通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段。但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间。
在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大。近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] 。但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥。本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象。本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心。无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失。无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件。中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地。而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感。2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑。中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障。
国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见。布局研究本质上是一个设施的选址问题。设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题。选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题。覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类。LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小。集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求。基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大。中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小。P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] 。选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] 。这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局。
本研究面向中国洪涝灾害对无人机迅捷观测的应用需求,以全国离散化格网数据为潜在需求点,以中国科学院野外观测台站作为空港的潜在设施点,以预防洪涝灾害等级数据作为权重,以无人机性能数据作为约束条件,综合运用MCLP模型和GIS空间分析技术,选择出一定数量的台站作为在全国范围构建起能够支撑洪涝灾害迅捷响应的无人机空港,形成无人机洪涝灾害应急观测网络在全国的布局。具体研究流程如图1 所示。
图1 面向洪涝灾害的无人机空港选址流程
Fig. 1 Flowchart of determining the UAV airport locations for flood observation
2 数据来源与研究方法
2.1 数据来源
2.1.1 中国洪涝灾害分布数据
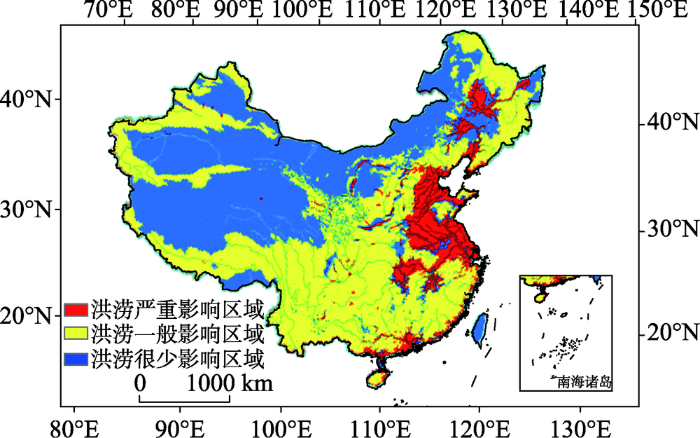
中国洪涝灾害的分布特点是东部多,西部少;沿海多,内陆少;平原低地多,高原山地少;山脉东坡和南坡多,西坡和北坡少。受地理环境的影响,重大洪涝灾害主要发生在长江流域、珠江流域、黄淮海流域和松辽流域等七大江河流域,时间上主要集中于夏季,具有明显的时间性特征[24 ] 。图2 是由国家防汛抗旱总指挥部办公室获取的防范中国洪涝灾害风险等级分布图,数据为图片格式。本文选取了21个控制点,使用3rd Order Polynomial转换方法,对原始数据进行地理校准,将其投影到正轴割圆锥等面积投影坐标系下,RMSE为0.16。中国的地理空间范围在3°51′N-53°31′N与73°33′E-135°05′E之间,1°E在空间上的距离为固定值,约为111.11 km。1°纬度的空间距离在南北方向差异较大,在4°N和30°N的空间距离分别约为110.83 km和66.87 km。因此校准后影像点位置误差在经度上约为17.78 km,在纬度上约为10.70~17.74 km。洪涝灾害风险等级的划分充分考虑了各地气象、人口、经济等因素的影响,但定性的分级数据难以用于计算,所以将受洪涝灾害严重影响、一般影响和很少影响区域内的需求点按需要无人机进行观测的重要性,以9:3:1的专家经验知识进行主观的量化界定。界定的依据是洪涝灾害通常是因降雨、融雪、冰凌、溃坝(堤)、风暴潮、热带气旋等造成的江河洪水、渍涝、山洪、滑坡和泥石流等及其引发的灾害,中国的洪涝灾害多发于七大河流域,所以将受洪涝灾害严重威胁区域需要进行无人机进行应急观测的重要程度设定为9。内陆沙漠、草原等区域因为降水稀缺、河道较少,发生洪涝灾害的可能性小的多,所以该区域需要无人机进行应急观测的重要程度设定为1。受洪涝灾害一般影响的区域,主要是强降雨、地形、土壤等影响,造成的塌方、泥石流,或因水资源调度过程失误所引发的水灾等。这些地方不易发生洪灾,但也存在洪涝灾害发生的一定风险,所以将该区域需要无人机进行应急观测的重要程度设定为3。
图2 中国预防洪涝灾害等级分布
Fig. 2 Map of flood-prevention risk in China
2.1.2 中国科学院野外台站分布数据
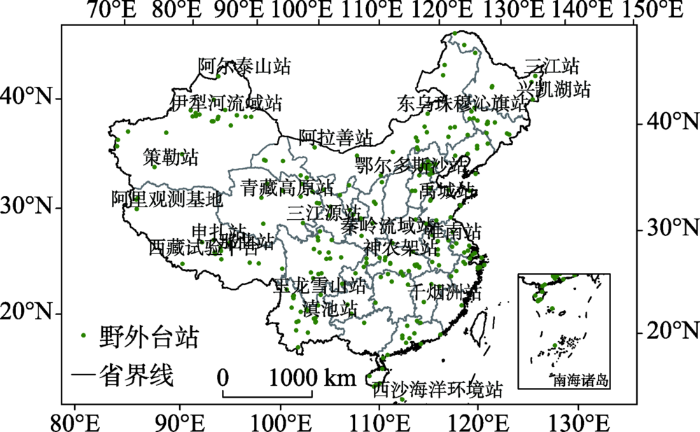
到目前为止,中国科学院先后建立了275个野外台站,包括国家级-院级-所级-实验室级-组级,其中我国境内有263个,境外有12个,分别分布在哈萨克斯坦、塔吉克斯坦、乌兹别克斯坦、吉尔吉斯斯坦和蒙古国境内。这些台站遍布中国各地理区域和水文流域,涵盖了生态、环境、农业、海洋、地球物理、天文、等研究领域,是国家野外科学观测研究网络的骨干成员,在相关科学领域发挥着重要作 用[14 ] 。野外台站的基础设施完善,交通便利,作为无人机空港,可大幅度减少建设的成本。无人机作为新型的高精度、高频次数据获取手段,也可以大幅拓展野外台站实验数据的获取来源,野外观测台站已经使用无人机开展了生态监测、农情评估和灾害应急等研究。通过深入研究无人机遥感与中国科学院野外台站相结合,可最大程度的部门间的资源共享,实现互利共赢。此外,中国科学院无人机应用与管控研究中心,于2017年向空管部门申请了13个长期无人机固定空域,包括京津新城无人机试验场、千烟洲无人机试验场、滨州无人机试验场、东营无人机试验场、拉萨无人机试验场、吐鲁番无人机试验场、王朗山无人机试验场、古田山无人机试验场、内蒙古无人机试验场、怀来无人机试验场、白旗无人机试验场、乐亭无人机试验场、鼎湖山无人机试验场。其中,千烟洲、怀来、拉萨、吐鲁番、王朗山、古田、鼎湖山和内蒙古无人机试验场空域均是以台站为中心申报,在空间上可以与台站作为同一个点。剩余的京津新城、滨州、东营、白旗、乐亭,这5个验证场在地理空间上与台站不毗邻。因此本研究中可供选择的潜在无人机空港的数量是268个。本文对这268个潜在无人机空港的空间信息进行了汇总,其分布如图3 所示,境外的12个台站,在此未予考虑。
图3 中国科学院野外台站分布(2019年)
Fig. 3 Distribution map of CAS field stations(2019)
2.1.3 全国遥感无人机装备数据库
为便于了解全国遥感无人机生产企业分布状况、生产历史、生产机型和能力,更好地推广使用无人机遥感技术,国家遥感中心自2012年以来基于地理信息系统技术建立了全国无人机遥感系统信息库,较全面地反映了中国民用遥感无人机的发展概况[25 ] 。本文对库中的机型信息进行了扩充,涵盖了当前国内740余种型号的无人机平台信息,形成本研究的无人机装备数据库,对抗灾中的主要性能指标如飞行速度、续航时间、动力来源、起降方式、抗风等级等进行了梳理分析,用于评估抗灾条件下无人机的平均观测能力。结果表明,不同种类的无人机性能差异较大,电动无人机飞行平台稳定、获取影像质量较好,但续航时间较短,目前的电动无人机续航时间通常在2 h内;油动无人机续航时间较长,目前能达到8 h以上,但平台不稳定、噪声较大、拍摄影像质量较差。多旋翼类无人机可以实现定点悬停拍摄,固定翼类无人机飞行速度则可达140 km/h。洪涝灾害过程中通常伴有风雨,所以宜选取大型、固定翼、自控、抗风等级强的长航时类无人机为主。考虑到风雨天气条件对无人机作业效率的减损,无人机对灾害区域的充分观测,本文假设无人机从接收到应急观测指令起,在2 h应急时间内的最大服务距离为90 km,其中1 h用于空港到达受灾地点,1 h用于灾情观测。90 km是当前无人机飞行技术条件下其作业能力的保守估计,无人机遥感观测网络的建设仍需要一段时间,随着无人机性能的不断发展革新,空港的服务空间也会不断增大。
2.2 研究方法
覆盖模型主要应用于移动类(也称应急类)服务设施的选址问题中,覆盖的涵义是服务设施的服务范围能够涵盖到需求点[26 ] 。覆盖可以定义为对于任意设施点存在一个最大覆盖距离R (最大服务半径),当需求点i 至候选设施点j 的距离dij 在该标准距离R 内时,即dij ≤R ,则候选设施点j 覆盖需求点i ,反之则称候选设施点j 不能覆盖需求点i 。本研究中将全国范围按照0.5°×0.5°的空间范围进行格网离散化,提取每个格网的中心点,作为无人机空港观测的潜在需求点。各中国科学院野外观测台站,作为设施点集合。以台站设施点为中心,以最大服务距离作为半径,进行缓冲区分析,得到所有台站的覆盖范围;落在台站覆盖范围内的所有需求点即本研究中需求点集合。应急服务设施应急响应的及时性要求,就体现在服务设施的最大覆盖距离上。覆盖模型包括LSCP和MCLP两类,LSCP是MCLP的基础,下面我们对LSCP和MCLP进行简单介绍。
2.2.1 位置集合覆盖模型(LSCP)
LSCP的目标是寻求能够覆盖到所有需求点的服务设施数目最小,或者服务设施建设成本最低。假设需求点集合为{i ∈I },候选设施点集合为{j ∈J },需求点i 至候选设施点j 的距离为dij ,设二元决策变量xj ,当候选设施点j 被选中时,xj =1;否则,xj =0。记所有能覆盖需求点i 的候选设施点的集合为 N i = { j | d ij ≤ R }
min f = ∑ j∈J w j x j
s.t. ∑ j∈J x j ≥ 1 , ∀ i ∈ I
x j ∈ { 0,1 } , ∀ j ∈ J
式中:wj 为权重系数,表示第j 个候选设施点的建设费用,目标函数(式(1))确保服务设施建设成本最低。若每个候选设施点的建设费用相同,wj =1,目标函数则表示确保设施数目最少。式(2)的约束条件保证每个需求点至少被一个设施点覆盖,式(3)的约束条件限制决策变量xj 为0,1二元变量。
LSCP模型相对简单,但十分有用,它能够用来识别覆盖所有需求点的服务设施的最有效配置,对于医院、消防等服务设施的配置非常适用。但此模型没有考虑需求的规模,当没有足够的资源去满足所有的需求时,则需要在给定条件下最大化满足服务需求。
2.2.2 最大覆盖模型(MCLP)
MCLP是LSCP的一个变形,用于解决设施点不能够全部覆盖所有需求点,只能确定P 个设施,使覆盖的需求点的价值总和最大。MCLP无论在理论上还是实践中都已被证明是设施选址问题最有用的模型之一[27 ] 。设yi 是二元值变量,当第i 需求点被覆盖时,yi =1,否则yi =0,设xj 为二元值变量,当候选设施j 被选中时,xj =1;否则xj =0。记所有能覆盖需求点i 的候选设施点的集合为 N i = { j | d ij ≤ R }
max f = ∑ i∈I w i y i
$s.t\ \ \sum\limits_{j∈N_{i}}x_{j}-y_{i}≥0\ ∀i∈I$(5)
∑ j∈J x j = P
x j , y i ∈ { 0,1 } , ∀ i ∈ I , j ∈ J
其中,式(5)的约束条件表示只有先在j 点建立设施才能够覆盖需求点i 。式(6)的约束条件表示需要建立的设施数目,式(7)的约束条件限定决策变量xj 和yi 为0,1二元变量。wj 为权重系数,表示第i 个需求点的价值(可以是面积,人口,效益等),目标函数(式(4))确保覆盖需求点的价值总和最大。权重系数wj 在很大程度上体现了空港布局的原则与侧重点。面向洪涝灾害的无人机空港布局,优先考虑洪涝灾害高发区和易受洪涝灾害影响区域。在同等洪涝灾害等级区域内,则优先考虑最大面积覆盖。本项目拟在全部的野外台站中选取一定数量的野外台站,进行面向洪涝灾害的无人机空港布局,模型的实现与显示在Matlab R2017b和Arcmap 10.2软件条件下实现。
2.2.3 洪涝风险覆盖率
记需求点集合I 内所有需求点的洪涝风险总和S 由式(8)计算得到。布局P 个无人机空港设施站点,所覆盖的需求点的洪涝风险等级为max f ,由式(4)计算得到。P 个空港设施对需求点集合I 洪涝风险的覆盖率可由式(9)计算得到,用于评估空港设施的服务能力。
S = ∑ j∈I w i y i , y i = 1
r p = max f S
式中:i 表示第i 个需求点;wi 表示第i 个需求点的洪涝风险等级;yi 是一个二元值变量,yi =1表示该需求点被覆盖,将该点信息统计在内,yi =0表示该需求点未被覆盖,该点信息不予统计;I 表示所有需求点的集合;S 表示I 内所有需求点的洪涝风险总和;max f 表示由最大覆盖模型得到P 个空港设施所覆盖的需求点的洪涝风险总和;rp 表示P 个空港设施对需求点集合I 洪涝风险的覆盖率,用以表示所选的设施点对总体需求点的覆盖能力。rp 越大,表示对需求区域洪涝灾害的覆盖能力越强;rp 越小,表示对需求区域的覆盖能力越弱。
3 结果及分析
3.1 无人机空港数量
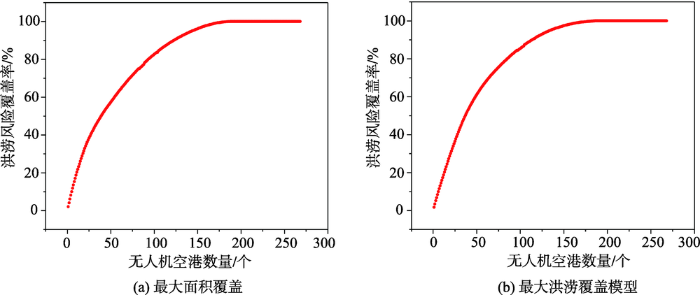
为了尽可能地提高无人机空港的使用效率,本文利用最大面积覆盖的MCLP和最大洪涝风险条件下两种模型对无人机空港进行布局实验。按照第2.1.3节无人机空港对应急救援的需求,90 km作为无人机空港的最大应急服务距离,在这个距离条件下,依据2种模型条件下空港对需求点的洪涝风险覆盖率随空港数量变化的相互关系,绘制了其成本-效益曲线,如图4 所示。从图中可看出,随着空港数量的不断增加,2种模型条件下的洪涝风险覆盖率都在不断增加,二者都在空港设施的数量P 达到188个的时候,需求点集合I 中的所有需求点均能够被覆盖。这表明当空港数量(成本)在充分多的条件下,两种布局策略都能够满足应急观测需求,布局策略对观测效益的影响并不显著。但在无人机空港数量有限的条件下,最大洪涝风险覆盖条件下的洪涝风险覆盖率明显较最大面积覆盖条件下的洪涝风险覆盖率升高的快,这表明在空港数量有限时,最大洪涝风险覆盖模型相较于最大面积覆盖模型更能够选择出那些在洪涝高风险区域的设施点,这使空港布局对洪涝风险的监测更有针对性。相比较,最大面积覆盖条件下的空港布局,因其未考虑洪涝风险的影响,在布局中洪涝风险覆盖率变化不稳定,在成本-效益曲线中变现为不平滑,这是因为该模型选取的点尽可能多的覆盖了需求点,但对需求点的空间位置和洪涝风险属性并未予以考虑。受到无人机空港建设成本、部门合作等现实因素的制约,在全部的野外台站开展无人机空港建设条件尚不成熟,因此宜选取部分台站进行无人机遥感观测网的试点工作。在最大洪涝风险覆盖模型中,当空港设施的数量为81的时候,空港数量仅占台站数目的1/3,但其对洪涝灾害的覆盖能力却超过了总量的2/3,台站数量与观测效益达到了优化协同,因此在本研究中将空港的数量设定为81个。
图4 无人机空港在90 km最大服务距离条件下最大面积覆盖和最大洪涝覆盖模型的成本-效益曲线
Fig. 4 Cost-effective curves of maximum area covered and maximum flood risk coveredunder 90km service distance of UAV airports
3.2 无人机空港布局
3.2.1 最大面积条件下的无人机空港布局
本文对空港应急服务范围为90 km条件下的最大面积覆盖模型选取出的81个空港的位置进行了显示,结果如图5 所示。需求点集合内共有1417个需求点(图中红色点),选取出来的81个空港(绿色点)共覆盖了853个需求点,覆盖的洪涝风险覆盖率为62.5%(表1 )。从图中可以看出,台站的选取主要分布在较为空旷稀疏的区域,在全国范围内分布较为平均,不同设施点所覆盖的交叉范围非常小。这种布局的优点是尽可能地保障每个地区的公平性,但其缺点就是布局相对洪涝灾害缺乏针对性,有可能造成的一种后果就是洪涝灾害频发区域部署的无人机空港因其数量和距离限制,在洪涝灾害期间会超负荷运行,并且对一部分洪涝灾害无法进行探测。另外,洪涝灾害很少发生区域部署的无人机空港资源,可能因常年不发生洪涝灾害,其功能得不到有效发挥。
图5 最大面积条件下选取的81个空港
Fig. 5 Selected 81 UAV airports that cover the largest areas
3.2.2 最大洪涝风险条件下的无人机空港布局
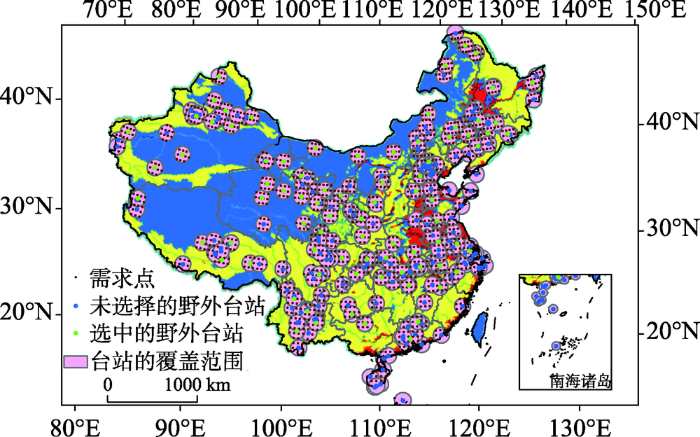
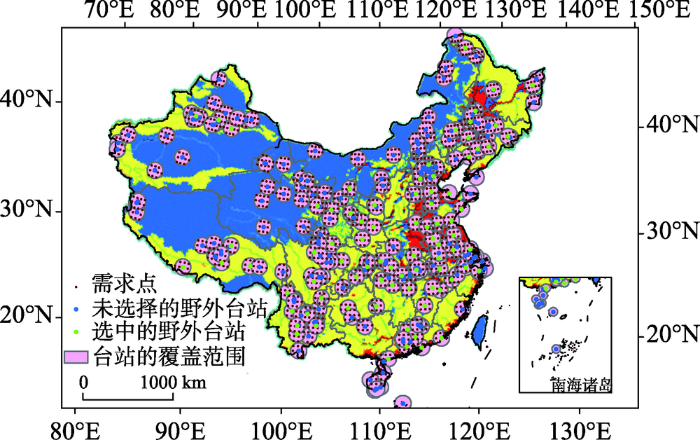
最大面积条件下的空港布局模式实现了覆盖需求点最多,但没有充分考虑我国洪涝灾害的分布特点,在实际的洪涝灾害应急监测中,有很多空港难以得到高效地利用。在最大洪涝风险覆盖模型中,本文进而将全国洪涝灾害的风险等级作为需求点的权重,进行洪涝风险条件下的无人机空港布局。图6 展示了最大洪涝风险条件下的无人机空港布局。结果显示选取的81个台站(绿色点)覆盖了1417需求点集合中的743个需求点(红色点),覆盖的洪涝风险覆盖率高达76.1%(表1 )。虽然需求点数目较最大面积条件下的覆盖减少了,但空港大都布局在中国洪涝灾害频发区,使布局更有针对性。从图中可以看出,选取出的空港主要分布在东部洪涝灾害多发区域(红色区域)和受洪涝灾害影响区域(黄色区域),而很少受到洪涝灾害影响的区域则很少布点,从而有效满足对洪涝灾害的观测需求。这种布局有目标明确、针对性强的特点,但该种布局的不足是在洪涝高发区域布点密集,在洪涝灾害很少爆发区域,布点稀少甚至没有。这可能造成的一种后果就是如果洪涝灾害很少爆发的区域,因降雨、融雪、调水失误等因素条件下造成的突发性洪涝灾害,附近将没有无人机资源可以实时调度。
图6 最大洪涝风险条件下选取的81个空港
Fig. 6 Selected 81 UAV airports that cover the largest flood risk
4 讨论
4.1 对空港布局结果的讨论
鉴于洪涝灾害的突发性和强大的破坏能力,卫星遥感、传统有人机遥感在洪涝监测方面的固有缺陷,构建能够对洪涝灾害进行实时、迅捷观测的无人机遥感观测网络非常重要。但由于无人机飞行高度和动力系统的约束,它不可能像卫星一样在高空轨道实时待命,因此它非常依赖于地面的空港。无人机空港的合理布局,直接关系到洪涝灾害发生时无人机的迅捷响应效率,进而在第一时间影响对灾情的评判和救援工作的指挥。本研究中采用2 h的应急响应时间,其中在1 h内无人机就可以到达受灾区域,实行实况观测,这在当前的应急体系中无疑是一项重大突破,对应急救援的意义重大。90 km的空港最大覆盖距离,也是基于当前电力系统和飞行速度条件下的保守估计,随着无人机性能的不断发展,无人机空港的服务能力还将进一步增强。从布局的结果来看,选取的81个台站有效的覆盖了当前洪涝灾害多发区域,如七大河流域、部分易涝城市,能够对绝大部分突发洪涝灾害进行观测。
同时,本研究的结果也存在一定的局限性。研究中将所有台站发展无人机空港的可能性都假设为相同的,但在实际过程中,台站因为其自身的定位、职能、研究方向存在差异,发展空港的意愿也不尽相同。例如,洞庭湖流域周边台站数量较多,有天鹅洲湿地生态系统定位站、洪湖湖泊生态系统观测研究站、江汉平原湿地生态试验站、洞庭湖湿地生态系统观测研究站、长沙农业环境观测研究站、桃源农业生态试验站、湖南常德砷污染土壤修复基地7个台站。研究结果选取了天鹅洲湿地生态系统定位站和长沙农业环境观测研究站作为空港,但从研究方向考虑,洞庭湖湿地生态系统观测研究站发展空港进行洪涝灾害监测更为适合一些。因此,本文的结果是在优选一定数量台站的前提下,在空间上给出了最大洪涝风险覆盖的布局模式,在建设空港的论证中,临近空港的替代方案还需要再结合台站自身特征进行选择。此外,也有很多洪涝多发区域是当前布局所无法覆盖到的,这种情况可以通过增加应急时间或者拓展无人机空港数量进行实现,但这将造成相应成本的增加。
需要指出的是,本研究以洪涝灾害作为应用案例,进行无人机空港的布局研究。但本研究中所提到的无人机遥感观测网络是一个开放性的网络,未来也可以与农业、林业、应急救援等行业部门相结合,拓展成为综合性的无人机遥感观测网络,而伴随着无人机遥感观测网的不断发展,空港的数量和服务范围都将不断增加,实时迅捷响应能力和观测能力都将在这个过程中会有长足的发展。
4.2 依托野外台站建设无人机空港
中国科学院野外台站是以科研工作为重点的站点,选取其作为无人机空港主要基于以下4个方面的原因:
(1)2017年4月中国科学院科技促进发展局成立了无人机应用与管控研究中心,中心的主要任务与职能便是统筹院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系。
(2)中国科学院野外台站遍布全国、几乎所有洪涝灾害多发区域范围内都有中国科学院的台站分布,具有广泛的全局性视野。而且台站的基础设施建设较好,与台站合作可以避免另起炉灶,只需在台站内部或者周边,修建无人机跑道、管控中心、机库等基础设施,配置各类无人航空器与载荷,大量节约建设成本。因此,台站是非常适合作为无人机遥感观测网络的空港选地。
(3)中国科学院许多地学和资源环境类的台站,本身就拥有一定数量的遥感无人机,存在一定的无人机应用需求,但受到制度、资金、技术、空域等因素的制约,各台站的无人机资源难于整合,无法形成合力。台站通过与无人机中心的合作,整合无人机资源,完善台站基础设施,拓展台站的定位与职能,服务于国家重大应用需求,因此很多台站也有建设无人机空港的需求与愿望。
(4)无人机应用与管控中心于2017年9月在天津京津新城建立了无人机科学试验的翱翔基地,作为无人机空港的蓝本,在陆续与中国科学院禹城站、千烟洲站、吐鲁番沙漠植物园站、古田站、王朗站、怀来站等台站开展的合作中,形成较好的合作模式,也与未来跟其他台站的合作提供了范本。因此,以中国科学院野外观测台站进行无人机空港的布局是有现实依据的。
4.3 无人机空港洪涝灾害业务化运行展望
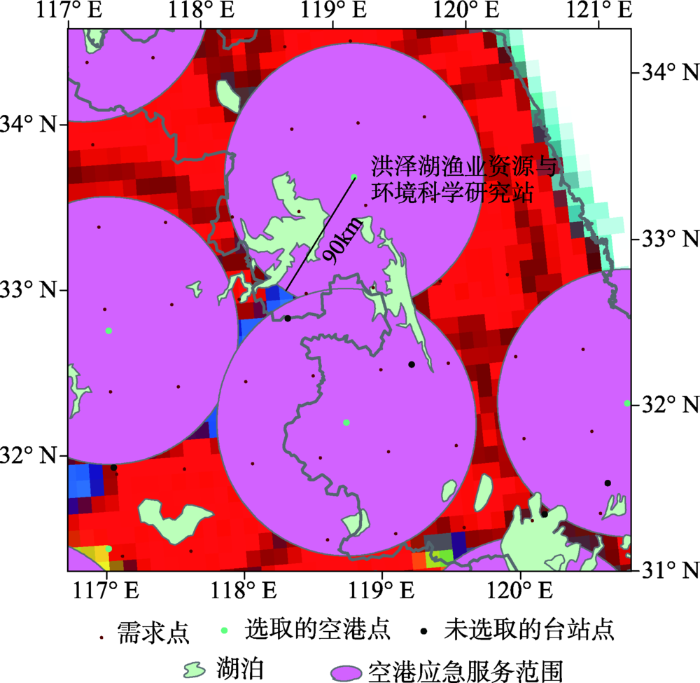
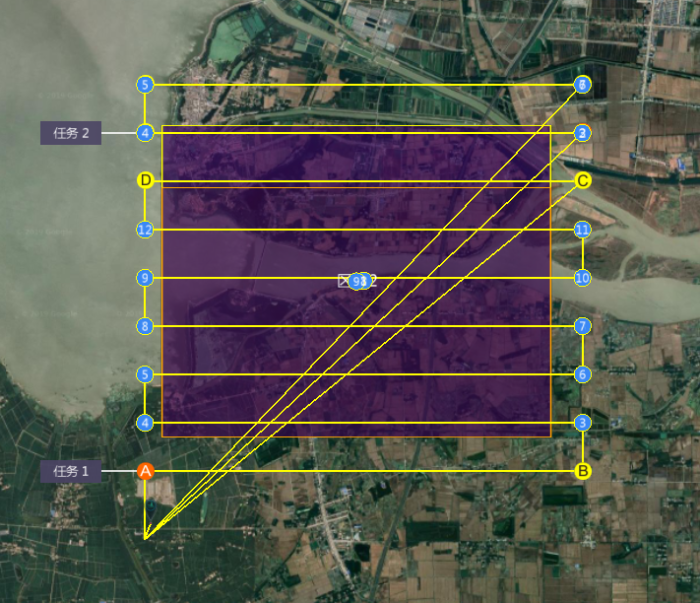
空港的业务化运行,拟通过无人机管控中心与台站合作,采用双方共建或者多方共建的形式进行建设。利用空域资源开放、无人机飞行培训等对外合作方式在空港基地锻炼和培养一支专业化的无人机飞行队伍,既可以参与科研任务无人机数据获取实验、提供无人机培训等业务、又能够在洪涝灾害时紧急参与遥感观测,从而保障空港基地内无人机装备的实用性以及人员业务能力的专业性。无人机中心与各空港间采用“无人机管控主中心-无人机空港分中心-无人机”的三级架构,实现对全国范围洪涝灾害的迅捷观测,在国家和地方层面上配合国家防总办公室开展汛期洪涝灾情监测与评估等工作。例如,长江中下游洪泽湖流域承泄淮河上中游的洪水,周边地区地形以平原洼地为主,常受洪涝灾害影响。洪泽湖渔业资源与环境科学研究站位于洪泽湖东北侧约20 km。若洪泽湖渔业资源与环境科学研究站建设有无人机空港,洪泽湖流域基本都处于无人机空港的应急观测范围内(图7 )。当洪泽湖某河堤出现水位预警和险情时,可由渔业资源与环境站的无人机空港基地派遣若干固定翼类无人机(如北京航空航天大学研发的“猛牛”)搭载广域SAR、可见光/红外视频相机等传感器对流域范围内洪涝灾害进行观测。为满足2 h的应急观测需求,无人机以90 km/h的飞行速度1 h内抵达受灾区域并开展航拍作业,洪涝观测作业时间不低于1 h。假设无人机在航拍过程中飞行速度为60 km/h,搭载索尼DSC-RX1RM2全画幅数码相机,获取地面影像的空间分辨率为0.2 m,影像航向重叠度为80%,旁向重叠度为60%,那么无人机在1 h的作业面积约为 24 km2 ,作业飞行距离约60 km(图8 是在深圳飞马无人机管家软件智航线中设定生成)。无人机获取的数据经地面管控中心快速处理,获取洪水淹没范围、居民地、房屋、道路、耕地等灾情信息,进行灾情快速评估,从而为抗洪救援指挥提供科学依据。
图7 洪泽湖流域与无人机空港及其90 km应急观测范围的空间分布
Fig. 7 Droneport and its 90 km emergency service area in the Hongze Lake region
图8 洪泽湖口无人机作业区域航拍路径
Fig. 8 UAV flight path in the Hongze Lake region
5 结论
本研究面向针对突发自然灾害无人机遥感作用的发挥,提出无人机空港及其布局的概念,以洪涝灾害应急救援为例,通过空间优化布局方法研究,利用最大覆盖选址模型,以中国科学院268个野外观测台站作为全国布局为基础,通过成本-效益曲线,计算选择出了81个台站作为无人机空港的选址点,构成全国面向洪涝灾害应急观测的无人机遥感观测网的原型。结果表明在空港数量足够多的条件下,不同的布局方案对观测效益影像不显著,但在空港数量有限的情况下,最大洪涝覆盖模型相对最大面积覆盖模型对洪涝风险的覆盖能力更强,适用性更强。在最大洪涝覆盖模型条件下,选取的设施点数量仅占所有设施点的30.2%,但其覆盖的洪涝风险却高到76.1%,无人机空港在空间上大部分被部署在位于洪涝灾害多发区域和受到洪涝灾害一般影响的区域,洪涝灾害很少影响的区域则部署很少。这表明该选址方法的目标明确、针对性强,适和对无人机空港选址与布局问题的研究。此外,空港的应急服务范围基本覆盖了中国的洪涝灾害的高发区,理论上能够在2 h内实现对我国洪涝灾害多发区域实时、迅捷的观测,这对于洪涝灾害应急救援和构建我国“空天地”一体化的应急观测体系意义重大。而随着无人机在洪涝灾害监测中的不断应用,无人机智能组网技术、多平台多载荷无人机数据融合技术、无人机数据快速处理技术将是重要的发展方向。未来拟在当前选址布局的基础上,构建基于“无人机管控主中心-地方空港分中心-野外测控指挥车的”三级无人机观测体系,在全国范围内形成无人机观测网络雏形。此外,本文中涉及到的数据、方法和初步成果对于进一步构建行业和综合性的全国无人机遥感观测网也有十分重要的借鉴和参照意义。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
张桂香 ,霍治国 ,吴立 ,等 .1961-2010年长江中下游地区农业洪涝灾害时空变化
[J].地理研究 ,2015 ,34 (6 ):1097 -1108 .
[本文引用: 1]
[ Zhang G X Huo Z G Wu L et al .The temporal and spatial variations of agricultural flood disaster over the middle and lower reaches of the Yangtze River from 1961 to 2010
[J]. Geographical Research , 2015 ,34 (6 ):1097 -1108 . ]
[本文引用: 1]
[2]
刘彤 ,闫天池 .我国的主要气象灾害及其经济损失
[J].自然灾害学报 ,2011 ,20 (2 ):90 -95 .
[本文引用: 1]
[ Liu T Yan T C Main meteorological disasters in China and their economic losses
[J]. Journal of Natural Disasters , 2011 ,20 (2 ):90 -95 . ]
[本文引用: 1]
[3]
李素菊 ,和海霞 ,刘明 ,等 .中国对地观测卫星在缅甸洪涝灾害应急监测中的应用
[J].航天器工程 ,2017 ,26 (2 ):146 -153 .
[本文引用: 1]
[ Li S J He H X Liu M et al .Application of China earth observation satellites for Myanmar flood emergency monitoring
[J]. Spacecraft Engineering , 2017 ,26 (2 ):146 -153 . ]
[本文引用: 1]
[4]
Kaku K Aso N Takiguchi F Space-based response to the 2011 Great East Japan Earthquake: Lessons learnt from JAXA's support using earth observation satellites
[J]. International Journal of Disaster Risk Reduction , 2015 ,12 :134 -153 .
[本文引用: 1]
[5]
Colomina I Molina P Unmanned aerial systems for photogrammetry and remote sensing: A review
[J]. ISPRS Journal of Photogrammetry & Remote Sensing , 2014 ,92 (2 ):79 -97 .
[本文引用: 1]
[6]
廖小罕 ,周成虎 ,苏奋振 ,等 .无人机遥感众创时代
[J].地球信息科学学报 ,2016 ,18 (11 ):1439 -1447 .
[本文引用: 1]
[ Liao X H Zhou C H Su F Z et al .The mass innovation era of UAV remote sensing
[J]. Journal of Geo-information Science , 2016 ,18 (11 ):1439 -1447 . ]
[本文引用: 1]
[7]
Gortney W E Department of defense dictionary of military and associated terms
[M]. Washington: Joint Publication , 2016 .
[本文引用: 1]
[8]
李德仁 ,李明 .无人机遥感系统的研究进展与应用前景
[J].武汉大学学报·信息科学版 ,2014 ,39 (5 ):505 -513 .
[本文引用: 1]
[ Li D R Li M Research advance and application prospect of unmanned aerial vehicle remote sensing system
[J]. Geomatics and Information Science of Wuhan University , 2014 ,39 (5 ):505 -513 . ]
[本文引用: 1]
[9]
李奇 . 基于中继卫星的无人飞行器组网体制研究
[J].无线电工程 ,2015 ,45 (4 ):1 -4 .
[本文引用: 1]
[ Li Q Research on networking system of unmanned aerial vehicles based on tracking and data relay satellite
[J], Radio Engineering , 2015 ,45 (4 ):1 -4 . ]
[本文引用: 1]
[10]
郭庆华 ,刘瑾 ,李玉美 ,等 .生物多样性近地面遥感监测:应用现状与前景展望
[J].生物多样性 ,2016 ,24 (11 ):1249 -1266 .
[本文引用: 1]
[ Guo Q H Liu J Li Y M et al .A near-surface remote sensing platform for biodiversity monitoring: Perspectives and prospects
[J]. Biodiversity Science , 2016 ,24 (11 ):1249 -1266 . ]
[本文引用: 1]
[11]
李德仁 . 论空天地一体化对地观测网络
[J].地球信息科学学报 ,2012 ,14 (4 ):419 -425 .
https://doi.org/10.3724/SP.J.1047.2012.00419
Magsci
[本文引用: 1]
摘要
空天地一体化对地观测网不仅是最具发展前途的高新技术领域之一,也是保障国家安全、经济社会发展的重要基础设施。本文首先全面论述了对地观测网研究的主要理论问题、关键技术、发展现状和趋势;然后,介绍了国产卫星遥感数据的一体化综合快速处理技术,在此基础上论述了广义空间信息网格的概念和内涵;最后指出,需以提供快速、精确和实时的空间信息服务为目标,加快开展对地观测网的理论与技术研究,推进数字地球走向智慧地球的转变。
[ Li D R On space-air-ground integrated Earth observation network
[J]. Journal of Geo-information Science , 2012 ,14 (4 ):419 -425 . ]
https://doi.org/10.3724/SP.J.1047.2012.00419
Magsci
[本文引用: 1]
摘要
空天地一体化对地观测网不仅是最具发展前途的高新技术领域之一,也是保障国家安全、经济社会发展的重要基础设施。本文首先全面论述了对地观测网研究的主要理论问题、关键技术、发展现状和趋势;然后,介绍了国产卫星遥感数据的一体化综合快速处理技术,在此基础上论述了广义空间信息网格的概念和内涵;最后指出,需以提供快速、精确和实时的空间信息服务为目标,加快开展对地观测网的理论与技术研究,推进数字地球走向智慧地球的转变。
[12]
宋晓阳 ,黄耀欢 ,董东林 ,等 .融合数字表面模型的无人机遥感影像城市土地利用分类
[J].地球信息科学学报 ,2018 , 20 (5 ):703 -711 .
[本文引用: 1]
[ Song X Y Huang Y H Dong D L et al .Urban land use classification from UAV remote sensing images based on digital surface model
[J]. Journal of Geo-information Science , 2018 ,20 (5 ):703 -711 . ]
[本文引用: 1]
[13]
廖小罕 ,周成虎 .轻小型无人机遥感发展报告 [R].北京 :科学出版社 ,2016 .
[本文引用: 1]
[ Liao X H Zhou C H. The report of light and small UAV remote sensing development [R].Beijing : Science Press , 2016 . ]
[本文引用: 1]
[14]
牛栋 . 中国科学院野外台站网络建设与研究进展
[J].林业科技管理 ,2003 (2 ):27 -28 .
[本文引用: 2]
[ Niu D The construction and research progress of the field network of Chinese Academy of Sciences
[J]. Forestry technology management , 2003 (2 ):27 -28 . ]
[本文引用: 2]
[15]
王兮之 ,葛剑平 .国家野外试验站现状分析及网络化体系构建
[J].生态科学 ,2003 ,22 (3 ):213 -217 .
Magsci
[本文引用: 1]
摘要
<p>为了推动筹建国家级重点野外科学观测试验站网络化管理的工作,充分发挥野外试验站所观测数据的作用.我们选取了25个野外试验站作为试点站,并于2002年8月至10月主要采用调查表、网上查询和电子邮件交流的方式进行调查,调研的主要内容涉及各野外台站的基本情况、软硬什和网络以及数据集现状,以及国外野外台站的运行状况和发展趋势.通过调查结果的分析,表明目前我国野外台站在数据监测、管理以及数据标准化与共享方面存在较多的不足之处.据此提出建立网络台站管理体系的框架,为实现我国国家级野外试验站数据标准化与信息共事的目标奠定基础.</p>
[ Network system status analysis of national long-term observation research in China [J]. Ecologic Science , 2003 ,22 (3 ):213 -217 . ]
Magsci
[本文引用: 1]
摘要
<p>为了推动筹建国家级重点野外科学观测试验站网络化管理的工作,充分发挥野外试验站所观测数据的作用.我们选取了25个野外试验站作为试点站,并于2002年8月至10月主要采用调查表、网上查询和电子邮件交流的方式进行调查,调研的主要内容涉及各野外台站的基本情况、软硬什和网络以及数据集现状,以及国外野外台站的运行状况和发展趋势.通过调查结果的分析,表明目前我国野外台站在数据监测、管理以及数据标准化与共享方面存在较多的不足之处.据此提出建立网络台站管理体系的框架,为实现我国国家级野外试验站数据标准化与信息共事的目标奠定基础.</p>
[16]
Roth R Computer solutions to minimum-cover problems
[J]. Operations Research , 1969 ,17 (3 ):455 -465 .
[本文引用: 1]
[17]
Toregas C Swain R Revelle C et al .The location of emergency service facilities
[J]. Operations Research , 1971 ,19 (6 ):1363 -1373 .
[本文引用: 1]
[18]
Church R Revelle C The maximal covering location problem
[J]. Papers of the Regional Science Association , 1974 ,32 (1 ):101 -118 .
[本文引用: 1]
[19]
Hakimi S L Optimum locations of switching centers and the absolute centers and medians of a Graph
[J]. Operations Research , 1964 ,12 (3 ):450 -459 .
[本文引用: 1]
[20]
Kariv O Hakimi S L An algorithmic approach to network location problems. II: The p-Medians
[J]. Siam Journal on Applied Mathematics , 1979 ,37 (3 ):539 -560 .
[本文引用: 1]
[21]
苏慧敏 ,葛炬 .基于集合覆盖模型的物流配送中心选址问题研究——以新疆昌吉市社区菜市场物流配送中心选址分析为例
[J].物流科技 ,2017 ,40 (2 ):24 -28 .
[本文引用: 1]
[ Su H M G J Research on location of logistics distribution center based on set covering model-A study of logistics distribution center location of community food market in Xinjiang Changji
[J]. Logistics Sci-Tech , 2017 ,40 (2 ):24 -28 . ]
[本文引用: 1]
[22]
陆坚毅 ,杨超 ,揭婉晨 .考虑绕行特征的电动汽车快速充电站选址问题及自适应遗传算法
[J].运筹与管理 ,2017 , 26 (1 ):8 -17 .
[本文引用: 1]
[ Lu J Y Yang C Jie W C An adaptive-self genetic algorithm for solving electric vehicle fast recharging location problem with detour characteristic
[J]. Operations Research and Management Science , 2017 ,26 (1 ):8 -17 . ]
[本文引用: 1]
[23]
陈志宗 ,尤建新 .重大突发事件应急救援设施选址的多目标决策模型
[J].管理科学 ,2006 ,19 (4 ):10 -14 .
[本文引用: 1]
[ Chen Z Z You J X A multi-objective decision model of emergency rescue facility location for large-scale emergency incidents
[J], Management Sciences in China , 2006 ,19 (4 ):10 -14 . ]
[本文引用: 1]
[24]
万金红 ,张葆蔚 ,刘建刚 ,等 . 1950-2013年我国洪涝灾情时空特征分析
[J].灾害学 ,2016 ,31 (2 ):63 -68 .
[本文引用: 1]
[ Wan J H Zhang B W Liu J G et al .The distribution of flood disaster loss during 1950-2013
[J]. Journal of Catastrophology , 2016 ,31 (2 ):63 -68 . ]
[本文引用: 1]
[25]
国家遥感中心.无人机遥感系统信息库
[EB/OL]. , 2012 .
URL
[本文引用: 1]
[ National Remote Sensing Center of China. UAV remote sensing system information database
[EB/OL]. , 2012 . ]
URL
[本文引用: 1]
[26]
陈志宗 . 城市防灾减灾设施选址模型与战略决策方法研究
[D].上海:同济大学 ,2006 .
[本文引用: 1]
[ Chen Z Z The location models and strategic decision method for urban disaster prevention and mitigation facilities
[D]. Shanghai: Tongji University , 2006 . ]
[本文引用: 1]
[27]
万波 . 公共服务设施选址问题研究
[D].武汉:华中科技大学 ,2012 .
[本文引用: 1]
[ Wan b Study on the public service facility location problem
[D]. Wuhan: Huazhong University of Science and Technology , 2012 . ]
[本文引用: 1]
1961-2010年长江中下游地区农业洪涝灾害时空变化
1
2015
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
1961-2010年长江中下游地区农业洪涝灾害时空变化
1
2015
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
我国的主要气象灾害及其经济损失
1
2011
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
我国的主要气象灾害及其经济损失
1
2011
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
中国对地观测卫星在缅甸洪涝灾害应急监测中的应用
1
2017
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
中国对地观测卫星在缅甸洪涝灾害应急监测中的应用
1
2017
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
Space-based response to the 2011 Great East Japan Earthquake: Lessons learnt from JAXA's support using earth observation satellites
1
2015
... 洪涝灾害是由于降水量多、过于集中,致使雨水无法及时排出,造成人员伤亡、房屋倒塌、交通阻断、农田淹没等,是一种多发性自然灾害[1 ] .洪涝灾害在中国发生频率高,影响范围广,造成损失大[2 ] ,是中国重点防治的自然灾害之一.洪涝灾害往往在较短时间内就造成大量的生命财产损失,灾害形势复杂多变,传统的地面调查和统计等手段很难及时获取洪水的动态信息,造成应急救援救助的难度非常大[3 ] .遥感可快速获取陆地表面的宏观、动态信息,对洪涝灾害的发生范围、变化情况进行全方位监控,获取及时、客观、准确的洪涝灾情信息.灾区遥感影像与基础地理、灾情信息等数据相结合,可迅速评估灾害造成的损失,判断灾情发展的态势,这对抗灾减灾与应急救援的意义重大.遥感监测成为重大灾害应急管理不可或缺的技术支撑手段[4 ] . ...
Unmanned aerial systems for photogrammetry and remote sensing: A review
1
2014
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
无人机遥感众创时代
1
2016
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
无人机遥感众创时代
1
2016
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
Department of defense dictionary of military and associated terms
1
2016
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
无人机遥感系统的研究进展与应用前景
1
2014
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
无人机遥感系统的研究进展与应用前景
1
2014
... 卫星遥感运行轨道高、重访周期长、易受天气影响,难以对洪涝灾害进行实时密集的观测;有人机航空遥感则存在调度难、成本高、且在极端天气下风险高的缺陷[5 ] .近年来,随着对地观测技术的不断发展,无人机遥感异军突起,表现出数据获取机动灵活、实时迅捷、成本低、精度高、安全系数高等优势[6 ] .无人机(Unmanned Aerial Vehicles, UAV)是指由动力驱动、不搭载操作人员的一种空中飞行器,采用空气动力为飞行器提供所需的升力,能够自主或遥控飞行,既能一次性使用也能进行回收,能够携带杀伤性或非杀伤性任务载荷[7 ] .无人机遥感(UAV Remote Sensing, UAVRS)则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取自然灾害、国土、资源、环境、突发事件等空间遥感信息,并进行实时处理、建模和分析的先进新兴航空遥感技术解决方案[8 ] .通过无人机回传的各类实时影像信息,进行复杂地形条件下的灾情评估,已成为当前应急救援的重要手段.但由于洪涝灾害的突发性,当前国内各行业部门的无人机观测力量又相对分散,缺乏就近部署,调度困难,在灾害发生时难以及时到达现场开展观测,这严重制约了无人机遥感对灾区数据的获取和对灾情的准确评估,滞缓了救援的时间. ...
基于中继卫星的无人飞行器组网体制研究
1
2015
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
基于中继卫星的无人飞行器组网体制研究
1
2015
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
生物多样性近地面遥感监测:应用现状与前景展望
1
2016
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
生物多样性近地面遥感监测:应用现状与前景展望
1
2016
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
论空天地一体化对地观测网络
1
2012
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
论空天地一体化对地观测网络
1
2012
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
融合数字表面模型的无人机遥感影像城市土地利用分类
1
2018
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
融合数字表面模型的无人机遥感影像城市土地利用分类
1
2018
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
1
2016
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
1
2016
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
中国科学院野外台站网络建设与研究进展
2
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
... 到目前为止,中国科学院先后建立了275个野外台站,包括国家级-院级-所级-实验室级-组级,其中我国境内有263个,境外有12个,分别分布在哈萨克斯坦、塔吉克斯坦、乌兹别克斯坦、吉尔吉斯斯坦和蒙古国境内.这些台站遍布中国各地理区域和水文流域,涵盖了生态、环境、农业、海洋、地球物理、天文、等研究领域,是国家野外科学观测研究网络的骨干成员,在相关科学领域发挥着重要作 用[14 ] .野外台站的基础设施完善,交通便利,作为无人机空港,可大幅度减少建设的成本.无人机作为新型的高精度、高频次数据获取手段,也可以大幅拓展野外台站实验数据的获取来源,野外观测台站已经使用无人机开展了生态监测、农情评估和灾害应急等研究.通过深入研究无人机遥感与中国科学院野外台站相结合,可最大程度的部门间的资源共享,实现互利共赢.此外,中国科学院无人机应用与管控研究中心,于2017年向空管部门申请了13个长期无人机固定空域,包括京津新城无人机试验场、千烟洲无人机试验场、滨州无人机试验场、东营无人机试验场、拉萨无人机试验场、吐鲁番无人机试验场、王朗山无人机试验场、古田山无人机试验场、内蒙古无人机试验场、怀来无人机试验场、白旗无人机试验场、乐亭无人机试验场、鼎湖山无人机试验场.其中,千烟洲、怀来、拉萨、吐鲁番、王朗山、古田、鼎湖山和内蒙古无人机试验场空域均是以台站为中心申报,在空间上可以与台站作为同一个点.剩余的京津新城、滨州、东营、白旗、乐亭,这5个验证场在地理空间上与台站不毗邻.因此本研究中可供选择的潜在无人机空港的数量是268个.本文对这268个潜在无人机空港的空间信息进行了汇总,其分布如图3 所示,境外的12个台站,在此未予考虑. ...
中国科学院野外台站网络建设与研究进展
2
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
... 到目前为止,中国科学院先后建立了275个野外台站,包括国家级-院级-所级-实验室级-组级,其中我国境内有263个,境外有12个,分别分布在哈萨克斯坦、塔吉克斯坦、乌兹别克斯坦、吉尔吉斯斯坦和蒙古国境内.这些台站遍布中国各地理区域和水文流域,涵盖了生态、环境、农业、海洋、地球物理、天文、等研究领域,是国家野外科学观测研究网络的骨干成员,在相关科学领域发挥着重要作 用[14 ] .野外台站的基础设施完善,交通便利,作为无人机空港,可大幅度减少建设的成本.无人机作为新型的高精度、高频次数据获取手段,也可以大幅拓展野外台站实验数据的获取来源,野外观测台站已经使用无人机开展了生态监测、农情评估和灾害应急等研究.通过深入研究无人机遥感与中国科学院野外台站相结合,可最大程度的部门间的资源共享,实现互利共赢.此外,中国科学院无人机应用与管控研究中心,于2017年向空管部门申请了13个长期无人机固定空域,包括京津新城无人机试验场、千烟洲无人机试验场、滨州无人机试验场、东营无人机试验场、拉萨无人机试验场、吐鲁番无人机试验场、王朗山无人机试验场、古田山无人机试验场、内蒙古无人机试验场、怀来无人机试验场、白旗无人机试验场、乐亭无人机试验场、鼎湖山无人机试验场.其中,千烟洲、怀来、拉萨、吐鲁番、王朗山、古田、鼎湖山和内蒙古无人机试验场空域均是以台站为中心申报,在空间上可以与台站作为同一个点.剩余的京津新城、滨州、东营、白旗、乐亭,这5个验证场在地理空间上与台站不毗邻.因此本研究中可供选择的潜在无人机空港的数量是268个.本文对这268个潜在无人机空港的空间信息进行了汇总,其分布如图3 所示,境外的12个台站,在此未予考虑. ...
国家野外试验站现状分析及网络化体系构建
1
2003
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
国家野外试验站现状分析及网络化体系构建
1
2003
... 在区域和全国范围内建立起一定的无人机遥感应急体系,构建无人机遥感观测网,实时迅捷地获取高精度的地表动态信息,对抢险救灾、应急救援的意义重大.近几年来,面向需求,国家已在建设全国和区域遥感网方面部署了一些项目,组织开展了大量的研究[9 ,10 ,11 ,12 ] .但是这些研究主要集中在卫星遥感、无人机遥感或者空天地垂直一体化研究,缺乏针对无人机遥感资源空间布局的研究,致使无人机迅捷响应灾害的能力得不到有效发挥.本文结合国家遥感中心专家组多年研究工作提出的无人机验证场和无人机空港概念[13 ] ,作为深化研究对象.本文提出的无人机空港是指无人机遥感观测网络的结点,是无人机相关资源的存放和观测任务的执行中心.无人机空港布局则是无人机空港在地理空间上的分布,达到观测效益最大化和经济成本最小化的优化协同,在灾害发生时可以迅速开展高精度、实时的遥感观测,获取第一时间的灾情信息,为抗灾救灾决策提供数据支持,从而避免可能导致的更大程度上的人员伤亡和财产损失.无人机空港通常须具备相应空域条件、办公场地、无人机机库、通信设施、无人机验证场及一定数量的专业人员等条件.中国科学院的系列野外科学研究和观测台站是国家科学观察、试验和研究的重要基地,在地域空间上分布广泛,西起塔克拉玛干沙漠,东至三江平原,南自海南岛南端的三亚,北到大兴安岭北部的漠河,类型多样,从海洋到陆地,从平原、丘陵到高原、高山,从热带到寒温带,从干旱区到湿润区,中国各主要地理区域内都有中国科学院野外台站的分布,构成了我国生态与环境全面观测的基本网络构架[14 ,15 ] ,且台站基础设施齐全,交通便利,是无人机空港的优质选址地.而事实上,中国科学院野外观测台站已经使用遥感无人机开展生态监测、农情评估和灾害应急遥感.2017年4月中国科学院科技促进发展局成立无人机应用与管控研究中心,主要任务与职能是统筹中国科学院内无人机资源,加强院内外合作,构建全国无人机应用与管控网络体系,为国土与海洋监测、农林植保、环境保护、应急响应等提供无人机应用与管控技术支撑.中心依托中国科学院地理资源所构建,并由中国科学院遥感所、成都山地所、新疆生地所、大气所、植物所等单位进行共建,这为依托台站进行无人机空港布局奠定了组织保障. ...
Computer solutions to minimum-cover problems
1
1969
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
The location of emergency service facilities
1
1971
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
The maximal covering location problem
1
1974
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
Optimum locations of switching centers and the absolute centers and medians of a Graph
1
1964
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
An algorithmic approach to network location problems. II: The p-Medians
1
1979
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
基于集合覆盖模型的物流配送中心选址问题研究——以新疆昌吉市社区菜市场物流配送中心选址分析为例
1
2017
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
基于集合覆盖模型的物流配送中心选址问题研究——以新疆昌吉市社区菜市场物流配送中心选址分析为例
1
2017
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
考虑绕行特征的电动汽车快速充电站选址问题及自适应遗传算法
1
2017
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
考虑绕行特征的电动汽车快速充电站选址问题及自适应遗传算法
1
2017
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
重大突发事件应急救援设施选址的多目标决策模型
1
2006
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
重大突发事件应急救援设施选址的多目标决策模型
1
2006
... 国内外还没有明确提出无人机空港的概念,针对行业应用的布局的研究也还未见.布局研究本质上是一个设施的选址问题.设施选址问题的研究源于Weber提出在一个地区具体选择什么样的地点设置一个仓库,使得该仓库设施至所有顾客的总距离最小的问题.选址问题最经典的3个理论是覆盖问题、中位问题和中心问题,后来的选址问题基本上都发端于这3个问题.覆盖问题可分为位置集合覆盖问题(Location Set Covering Problem, LSCP)和最大覆盖问题(Maximum Covering Location Problem,MCLP) 2类.LSCP最早由Roth[16 ] 和Toregas等[17 ] 提出,用于解决消防中心和救护车等应急型公共服务的选址问题,在满足覆盖所有需求点的条件下,寻求所建设施个数或建设成本最小.集覆盖问题需要覆盖所有的需求点,需要较多的建设成本,在财政预算有限的情况下,很难达到此要求.基于此,Church和Revelle[18 ] 提出了MCLP,假设设施的数目P和覆盖半径R已知,设施最优选址点限制在网络节点上,如何对设施进行合理选址,使可覆盖的需求量最大.中位问题最早由Hakimi[19 ] 提出,假设每个节点既是需求点也是设施候选点,对于任一给定设施数,求取所有需求点到所分配设施的平均权重距离最小.P-中心问题是研究如何在网络中对P个设施进行选址,使得任意需求点到与其最近设施的最大距离最小化的问题[20 ] .选址问题现已被广泛应用于物流配送中心选址、电动车充电站选址、客运枢纽选址、医院、消防等公共服务设施的选址等方面[21 ,22 ,23 ] .这些模型普遍针对一定场景下固定设施的选址,考虑的因素不同,目标各异,因此不能直接应用于面向洪涝灾害应急监测的无人机空港布局. ...
1950-2013年我国洪涝灾情时空特征分析
1
2016
... 中国洪涝灾害的分布特点是东部多,西部少;沿海多,内陆少;平原低地多,高原山地少;山脉东坡和南坡多,西坡和北坡少.受地理环境的影响,重大洪涝灾害主要发生在长江流域、珠江流域、黄淮海流域和松辽流域等七大江河流域,时间上主要集中于夏季,具有明显的时间性特征[24 ] .图2 是由国家防汛抗旱总指挥部办公室获取的防范中国洪涝灾害风险等级分布图,数据为图片格式.本文选取了21个控制点,使用3rd Order Polynomial转换方法,对原始数据进行地理校准,将其投影到正轴割圆锥等面积投影坐标系下,RMSE为0.16.中国的地理空间范围在3°51′N-53°31′N与73°33′E-135°05′E之间,1°E在空间上的距离为固定值,约为111.11 km.1°纬度的空间距离在南北方向差异较大,在4°N和30°N的空间距离分别约为110.83 km和66.87 km.因此校准后影像点位置误差在经度上约为17.78 km,在纬度上约为10.70~17.74 km.洪涝灾害风险等级的划分充分考虑了各地气象、人口、经济等因素的影响,但定性的分级数据难以用于计算,所以将受洪涝灾害严重影响、一般影响和很少影响区域内的需求点按需要无人机进行观测的重要性,以9:3:1的专家经验知识进行主观的量化界定.界定的依据是洪涝灾害通常是因降雨、融雪、冰凌、溃坝(堤)、风暴潮、热带气旋等造成的江河洪水、渍涝、山洪、滑坡和泥石流等及其引发的灾害,中国的洪涝灾害多发于七大河流域,所以将受洪涝灾害严重威胁区域需要进行无人机进行应急观测的重要程度设定为9.内陆沙漠、草原等区域因为降水稀缺、河道较少,发生洪涝灾害的可能性小的多,所以该区域需要无人机进行应急观测的重要程度设定为1.受洪涝灾害一般影响的区域,主要是强降雨、地形、土壤等影响,造成的塌方、泥石流,或因水资源调度过程失误所引发的水灾等.这些地方不易发生洪灾,但也存在洪涝灾害发生的一定风险,所以将该区域需要无人机进行应急观测的重要程度设定为3. ...
1950-2013年我国洪涝灾情时空特征分析
1
2016
... 中国洪涝灾害的分布特点是东部多,西部少;沿海多,内陆少;平原低地多,高原山地少;山脉东坡和南坡多,西坡和北坡少.受地理环境的影响,重大洪涝灾害主要发生在长江流域、珠江流域、黄淮海流域和松辽流域等七大江河流域,时间上主要集中于夏季,具有明显的时间性特征[24 ] .图2 是由国家防汛抗旱总指挥部办公室获取的防范中国洪涝灾害风险等级分布图,数据为图片格式.本文选取了21个控制点,使用3rd Order Polynomial转换方法,对原始数据进行地理校准,将其投影到正轴割圆锥等面积投影坐标系下,RMSE为0.16.中国的地理空间范围在3°51′N-53°31′N与73°33′E-135°05′E之间,1°E在空间上的距离为固定值,约为111.11 km.1°纬度的空间距离在南北方向差异较大,在4°N和30°N的空间距离分别约为110.83 km和66.87 km.因此校准后影像点位置误差在经度上约为17.78 km,在纬度上约为10.70~17.74 km.洪涝灾害风险等级的划分充分考虑了各地气象、人口、经济等因素的影响,但定性的分级数据难以用于计算,所以将受洪涝灾害严重影响、一般影响和很少影响区域内的需求点按需要无人机进行观测的重要性,以9:3:1的专家经验知识进行主观的量化界定.界定的依据是洪涝灾害通常是因降雨、融雪、冰凌、溃坝(堤)、风暴潮、热带气旋等造成的江河洪水、渍涝、山洪、滑坡和泥石流等及其引发的灾害,中国的洪涝灾害多发于七大河流域,所以将受洪涝灾害严重威胁区域需要进行无人机进行应急观测的重要程度设定为9.内陆沙漠、草原等区域因为降水稀缺、河道较少,发生洪涝灾害的可能性小的多,所以该区域需要无人机进行应急观测的重要程度设定为1.受洪涝灾害一般影响的区域,主要是强降雨、地形、土壤等影响,造成的塌方、泥石流,或因水资源调度过程失误所引发的水灾等.这些地方不易发生洪灾,但也存在洪涝灾害发生的一定风险,所以将该区域需要无人机进行应急观测的重要程度设定为3. ...
国家遥感中心.无人机遥感系统信息库
1
2012
... 为便于了解全国遥感无人机生产企业分布状况、生产历史、生产机型和能力,更好地推广使用无人机遥感技术,国家遥感中心自2012年以来基于地理信息系统技术建立了全国无人机遥感系统信息库,较全面地反映了中国民用遥感无人机的发展概况[25 ] .本文对库中的机型信息进行了扩充,涵盖了当前国内740余种型号的无人机平台信息,形成本研究的无人机装备数据库,对抗灾中的主要性能指标如飞行速度、续航时间、动力来源、起降方式、抗风等级等进行了梳理分析,用于评估抗灾条件下无人机的平均观测能力.结果表明,不同种类的无人机性能差异较大,电动无人机飞行平台稳定、获取影像质量较好,但续航时间较短,目前的电动无人机续航时间通常在2 h内;油动无人机续航时间较长,目前能达到8 h以上,但平台不稳定、噪声较大、拍摄影像质量较差.多旋翼类无人机可以实现定点悬停拍摄,固定翼类无人机飞行速度则可达140 km/h.洪涝灾害过程中通常伴有风雨,所以宜选取大型、固定翼、自控、抗风等级强的长航时类无人机为主.考虑到风雨天气条件对无人机作业效率的减损,无人机对灾害区域的充分观测,本文假设无人机从接收到应急观测指令起,在2 h应急时间内的最大服务距离为90 km,其中1 h用于空港到达受灾地点,1 h用于灾情观测.90 km是当前无人机飞行技术条件下其作业能力的保守估计,无人机遥感观测网络的建设仍需要一段时间,随着无人机性能的不断发展革新,空港的服务空间也会不断增大. ...
国家遥感中心.无人机遥感系统信息库
1
2012
... 为便于了解全国遥感无人机生产企业分布状况、生产历史、生产机型和能力,更好地推广使用无人机遥感技术,国家遥感中心自2012年以来基于地理信息系统技术建立了全国无人机遥感系统信息库,较全面地反映了中国民用遥感无人机的发展概况[25 ] .本文对库中的机型信息进行了扩充,涵盖了当前国内740余种型号的无人机平台信息,形成本研究的无人机装备数据库,对抗灾中的主要性能指标如飞行速度、续航时间、动力来源、起降方式、抗风等级等进行了梳理分析,用于评估抗灾条件下无人机的平均观测能力.结果表明,不同种类的无人机性能差异较大,电动无人机飞行平台稳定、获取影像质量较好,但续航时间较短,目前的电动无人机续航时间通常在2 h内;油动无人机续航时间较长,目前能达到8 h以上,但平台不稳定、噪声较大、拍摄影像质量较差.多旋翼类无人机可以实现定点悬停拍摄,固定翼类无人机飞行速度则可达140 km/h.洪涝灾害过程中通常伴有风雨,所以宜选取大型、固定翼、自控、抗风等级强的长航时类无人机为主.考虑到风雨天气条件对无人机作业效率的减损,无人机对灾害区域的充分观测,本文假设无人机从接收到应急观测指令起,在2 h应急时间内的最大服务距离为90 km,其中1 h用于空港到达受灾地点,1 h用于灾情观测.90 km是当前无人机飞行技术条件下其作业能力的保守估计,无人机遥感观测网络的建设仍需要一段时间,随着无人机性能的不断发展革新,空港的服务空间也会不断增大. ...
城市防灾减灾设施选址模型与战略决策方法研究
1
2006
... 覆盖模型主要应用于移动类(也称应急类)服务设施的选址问题中,覆盖的涵义是服务设施的服务范围能够涵盖到需求点[26 ] .覆盖可以定义为对于任意设施点存在一个最大覆盖距离R (最大服务半径),当需求点i 至候选设施点j 的距离dij 在该标准距离R 内时,即dij ≤R ,则候选设施点j 覆盖需求点i ,反之则称候选设施点j 不能覆盖需求点i .本研究中将全国范围按照0.5°×0.5°的空间范围进行格网离散化,提取每个格网的中心点,作为无人机空港观测的潜在需求点.各中国科学院野外观测台站,作为设施点集合.以台站设施点为中心,以最大服务距离作为半径,进行缓冲区分析,得到所有台站的覆盖范围;落在台站覆盖范围内的所有需求点即本研究中需求点集合.应急服务设施应急响应的及时性要求,就体现在服务设施的最大覆盖距离上.覆盖模型包括LSCP和MCLP两类,LSCP是MCLP的基础,下面我们对LSCP和MCLP进行简单介绍. ...
城市防灾减灾设施选址模型与战略决策方法研究
1
2006
... 覆盖模型主要应用于移动类(也称应急类)服务设施的选址问题中,覆盖的涵义是服务设施的服务范围能够涵盖到需求点[26 ] .覆盖可以定义为对于任意设施点存在一个最大覆盖距离R (最大服务半径),当需求点i 至候选设施点j 的距离dij 在该标准距离R 内时,即dij ≤R ,则候选设施点j 覆盖需求点i ,反之则称候选设施点j 不能覆盖需求点i .本研究中将全国范围按照0.5°×0.5°的空间范围进行格网离散化,提取每个格网的中心点,作为无人机空港观测的潜在需求点.各中国科学院野外观测台站,作为设施点集合.以台站设施点为中心,以最大服务距离作为半径,进行缓冲区分析,得到所有台站的覆盖范围;落在台站覆盖范围内的所有需求点即本研究中需求点集合.应急服务设施应急响应的及时性要求,就体现在服务设施的最大覆盖距离上.覆盖模型包括LSCP和MCLP两类,LSCP是MCLP的基础,下面我们对LSCP和MCLP进行简单介绍. ...
公共服务设施选址问题研究
1
2012
... MCLP是LSCP的一个变形,用于解决设施点不能够全部覆盖所有需求点,只能确定P 个设施,使覆盖的需求点的价值总和最大.MCLP无论在理论上还是实践中都已被证明是设施选址问题最有用的模型之一[27 ] .设yi 是二元值变量,当第i 需求点被覆盖时,yi =1,否则yi =0,设xj 为二元值变量,当候选设施j 被选中时,xj =1;否则xj =0.记所有能覆盖需求点i 的候选设施点的集合为 N i = { j | d ij ≤ R } . 则最大覆盖模型为: ...
公共服务设施选址问题研究
1
2012
... MCLP是LSCP的一个变形,用于解决设施点不能够全部覆盖所有需求点,只能确定P 个设施,使覆盖的需求点的价值总和最大.MCLP无论在理论上还是实践中都已被证明是设施选址问题最有用的模型之一[27 ] .设yi 是二元值变量,当第i 需求点被覆盖时,yi =1,否则yi =0,设xj 为二元值变量,当候选设施j 被选中时,xj =1;否则xj =0.记所有能覆盖需求点i 的候选设施点的集合为 N i = { j | d ij ≤ R } . 则最大覆盖模型为: ...
 , 廖小罕
, 廖小罕

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}