
基于DEM纹理特征的月貌自动识别方法探究
作者简介:王琛智(1992-),男,江苏徐州人,本科生,主要从事DEM与数字地形分析研究。E-mail:archange.wang@gmail.com
收稿日期: 2014-04-16
要求修回日期: 2014-06-16
网络出版日期: 2015-01-05
基金资助
国家自然科学基金项目(41171320)
江苏省高校自然科学基金重大项目(13KJA170001)
江苏省研究生科研创新计划项目(KYLX_0701)
A Method for Identifying the Lunar Morphology Based on Texture from DEMs
Received date: 2014-04-16
Request revised date: 2014-06-16
Online published: 2015-01-05
Copyright
月海和月陆是两种最主要的月貌单元,对于月海及月陆快速准确地识别是进行各项月球研究的重要基础。目前,月海和月陆的识别大多采用DEM结合其派生地形因子建立指标体系的方法。这种方法虽然可在宏观尺度对月海和月陆进行识别和提取,但仍存在2个问题:(1)可扩展性差,不同地区难以共用同一套地形因子构建指标体系;(2)指标体系中各因子权重设置具有较大的主观性。针对以上问题,本文以“嫦娥一号”探测器获取的全月球DEM数据,从月表地形纹理特征的角度出发,提出一种以月表DEM数据识别月海、月陆的自动快速的方法。首先,利用灰度共生矩阵模型,以DEM数据为基础,实现对典型月海、月陆地形纹理特征的量化,然后,对量化指标的筛选,构建能有效区分两类月表形貌单元的特征向量。在此基础上,选用离差平方和作为识别器,最终实现对月海和月陆的自动识别。本文识别方法的整体识别率达到85.7%;综上可知,该方法既能克服原有方法中因子权重设置的主观性,又具有较好的通用性。
王琛智 , 汤国安 , 袁赛 , 孙建伟 , 刘凯 . 基于DEM纹理特征的月貌自动识别方法探究[J]. 地球信息科学学报, 2015 , 17(1) : 45 -53 . DOI: 10.3724/SP.J.1047.2015.00045
The mare and lunar highland are two major types of lunar morphology. The rapid and reliable identification of these two kinds of lunar morphology is an important basis in lunar research. Currently, major methods for identifying the mare and highland are based on the integrated evaluation index system, which is usually combined with the land surface parameters derived from DEM. Although the mare and highland can be identified by this method, it contains two problems yet. One is the lack of extensibility, because it is difficult for different regions of lunar to share one index system based on the same terrain factors. The other is the significant subjectivity in weight setting for each factor in the index system. To overcome the problems mentioned above, a new method considering the terrain texture features from lunar DEM is proposed by using the 500 m lunar DEM, which is produced from the global moon data obtained by Chinese satellite Chang’E-1(CE-1).Six typical mare sample areas and six typical highland sample areas were selected as the training zones. To construct the different terrain texture eigenvectors between the mare and highland, principal component analysis (PCA) was used to extract the main composition factors after the execution of quantitative analysis based on Gray level co-occurrence matrix (GLCM) model. Then the area located on 40° E~120° W, 0°~30° S was selected as the test area and the same approach in constructing terrain texture eigenvectors was used in this area. At last, supervised classification method was taken to identify those two types of lunar morphology. The recognition rate was about 85.7%. According to the comparative results between the new method and the traditional manual visual interpretation with Chang’E-1(CE-1) remote sensing image (in 120 m resolution),the proposed method is more effective and precise in identifying the mare and highland. Meanwhile, this method is driven by objective data, which spontaneously overcomes the subjectivity deficiency of current methods. Furthermore, this research provides a new thinking strategy of identifying and extracting different geomorphology based on the texture features from DEMs.
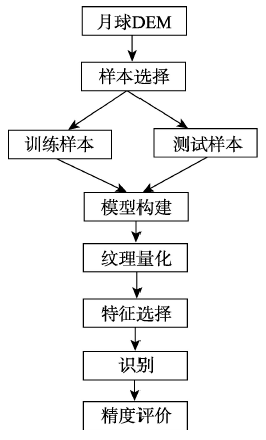
Fig. 1 Flow chart of automatic identification on lunar geomorphology图1 月表地貌自动识别流程图 |
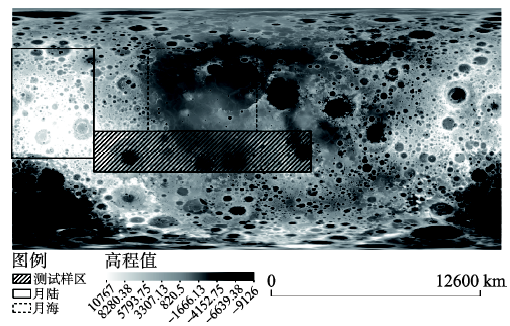
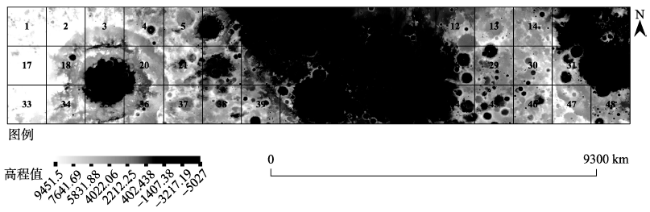
Fig. 2 Sample areas distribution图2 实验样区分布 |
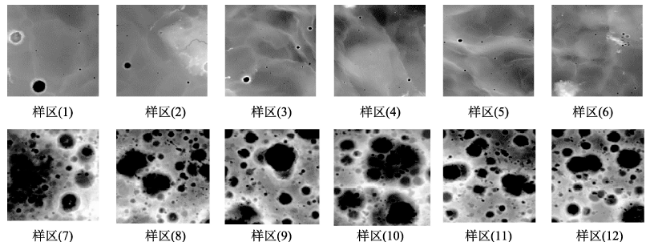
Fig.3 Typical samples of lunar mares and lunar highlands图3 典型月海、月陆样本示意图 |
Tab. 1 Sensitivity of texture parameters responding to the change of pixel pair distance表1 纹理参数对点对间距变化的敏感性 |
| 对点对间距d的敏感性 | 纹理参数 |
|---|---|
| 敏感 | 对比度、熵、和熵、二阶角距、逆差矩、方差和、相关度 |
| 不敏感 | 方差、均值和、差的方差 |
Tab. 2 Sensitivity of texture parameters responding to the change of pixel pair direction表2 纹理参数对点对方向变化的敏感性 |
| 对角度θ的敏感性 | 纹理参数 |
|---|---|
| 较敏感 | 对比度、二阶角距、逆差矩、相关度 |
| 不敏感 | 方差、方差和、均值和、和熵、熵、差的方差 |
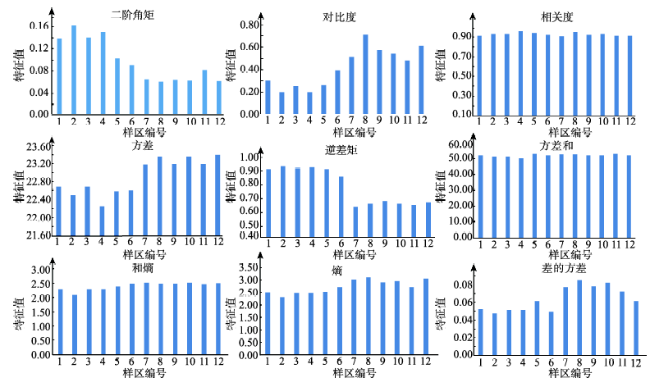
Fig. 4 Texture quantification of typical samples图4 典型样区纹理量化结果 |
Tab. 3 Correlation coefficients between texture parameters of sample areas表3 样区纹理参数相关性分析 |
| 二阶角矩 | 对比度 | 方差 | 逆差矩 | 相关度 | 熵 | 差的方差 | |
|---|---|---|---|---|---|---|---|
| 二阶角矩 | 1.000 | ||||||
| 对比度 | -0.356 | 1.000 | |||||
| 方差 | -0.699 | -0.248 | 1.000 | ||||
| 逆差矩 | 0.609 | -0.910 | -0.022 | 1.000 | |||
| 相关度 | 0.019 | -0.650 | 0.685 | 0.538 | 1.000 | ||
| 熵 | -0.926 | 0.642 | 0.477 | -0.839 | -0.258 | 1.000 | |
| 差的方差 | 0.599 | -0.897 | -0.022 | 0.982 | 0.529 | -0.831 | 1.000 |
Tab. 4 Eigen value of principal components analysis based on texture parameters表4 纹理参数提取的主成分特征值 |
| 序号 | 初始特征值 | ||
|---|---|---|---|
| 合计 | 方差所占百分比(%) | 累积百分比(%) | |
| 1 | 4.335 | 60.023 | 60.023 |
| 2 | 2.229 | 31.744 | 91.767 |
| 3 | 0.333 | 6.753 | 98.521 |
| 4 | 0.067 | 0.957 | 99.478 |
| 5 | 0.016 | 0.232 | 99.710 |
| 6 | 0.015 | 0.217 | 99.927 |
| 7 | 0.005 | 0.073 | 100.000 |
Tab. 5 Construction of factors表5 主成分因子构成 |
| 主成分Ⅰ | 主成分Ⅱ | 主成分Ⅲ | 解释主成分 | |
|---|---|---|---|---|
| 对比度 | -0.922 | -0.072 | -0.323 | 纹理的强弱和规则性 |
| 逆差矩 | 0.904 | 0.350 | 0.211 | |
| 差的方差 | 0.905 | 0.340 | 0.199 | |
| 二阶角距 | 0.335 | 0.933 | -0.089 | 纹理的粗细、均匀性 反映纹理的复杂程度和周期变化规律 |
| 方差 | 0.091 | -0.720 | 0.685 | |
| 熵 | -0.619 | -0.780 | -0.042 | |
| 相关度 | 0.395 | -0.032 | 0.917 | 纹理的各向异性 |
Tab. 6 Analysis of means on lunar mare principal components and lunar highlands principal components表6 月海和月陆主成分均值分析 |
| 第Ⅰ主成分 | 第Ⅱ主成分 | 第Ⅲ主成分 | |
|---|---|---|---|
| 月陆样区 | -0.521 | 0.424 | 0.299 |
| 月海样区 | 0.608 | -0.474 | 0.308 |
Fig. 5 Spatial location of areas to be tested图5 测试区域分布图 |
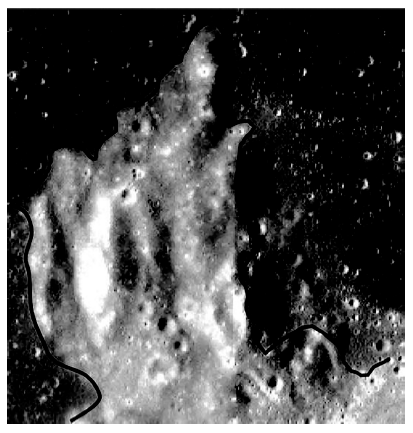
Fig. 6 Boundary between lunar mares and lunar highlands of test area图6 测试样区月海和月陆边缘示意图 |
Tab. 7 Result of automatic identification and manual visual interpretation on sample areas表7 测试样区月海月陆自动识别与目视解译的结果结比 |
| 样区编号 | 自动识别地貌类型 | 目视解译地貌类型 | |||
|---|---|---|---|---|---|
| 1 | 112.02 | 108.52 | 3.50 | 月陆 | 月陆 |
| 2 | 117.11 | 108.51 | 8.60 | 月陆 | 月陆 |
| 3 | 111.79 | 109.99 | 1.80 | 月陆 | 月陆 |
| 4 | 112.08 | 110.42 | 1.66 | 月陆 | 月陆 |
| 5 | 110.58 | 111.99 | -1.41 | 月陆 | 月陆 |
| 6 | 110.11 | 111.94 | -1.83 | 月海 | 月海月陆过渡 |
| 7 | 109.28 | 115.23 | -5.95 | 月陆 | 月海 |
| 8 | 112.37 | 128.35 | -15.98 | 月海 | 月海 |
| 9 | 109.94 | 120.27 | -10.33 | 月海 | 月海 |
| 10 | 159.44 | 207.28 | -47.84 | 月海 | 月海 |
| 11 | 119.03 | 141.25 | -22.22 | 月海 | 月海 |
| 12 | 115.16 | 112.17 | 2.99 | 月海 | 月陆 |
| 13 | 111.58 | 110.67 | 0.91 | 月陆 | 月陆 |
| 14 | 112.24 | 110.22 | 2.02 | 月陆 | 月陆 |
| 15 | 112.81 | 116.04 | -3.23 | 月海 | 月海 |
| 16 | 120.79 | 109.78 | 11.01 | 月海 | 月陆 |
| 17 | 112.27 | 109.80 | 2.46 | 月陆 | 月陆 |
| 18 | 111.45 | 110.54 | 0.91 | 月陆 | 月陆 |
| 19 | 166.24 | 133.03 | 33.21 | 月陆 | 月海月陆过渡 |
| 20 | 112.54 | 109.55 | 2.99 | 月陆 | 月陆 |
| 21 | 113.37 | 109.44 | 3.93 | 月陆 | 月陆 |
| 22 | 111.84 | 110.20 | 1.64 | 月陆 | 月陆 |
| 23 | 117.23 | 109.28 | 7.95 | 月海 | 月陆 |
| 24 | 117.53 | 109.41 | 8.12 | 月海 | 月海月陆过渡 |
| 25 | 110.71 | 124.36 | -13.65 | 月海 | 月海 |
| 26 | 112.61 | 130.71 | -18.10 | 月海 | 月海 |
| 27 | 125.44 | 129.78 | -4.34 | 月海 | 月海 |
| 28 | 123.67 | 109.76 | 13.91 | 月陆 | 月海月陆过渡 |
| 29 | 118.34 | 109.03 | 9.31 | 月陆 | 月陆 |
| 30 | 113.68 | 109.57 | 4.11 | 月陆 | 月陆 |
| 31 | 144.69 | 118.23 | 26.46 | 月陆 | 月陆 |
| 32 | 109.74 | 123.80 | -14.06 | 月陆 | 月海 |
| 33 | 111.05 | 110.72 | 0.33 | 月陆 | 月陆 |
| 34 | 112.98 | 109.57 | 3.41 | 月海 | 月陆 |
| 35 | 120.17 | 109.55 | 10.62 | 月陆 | 月海月陆过渡 |
| 36 | 113.07 | 109.23 | 3.83 | 月陆 | 月陆 |
| 37 | 114.37 | 109.38 | 4.99 | 月陆 | 月陆 |
| 38 | 112.26 | 110.58 | 1.68 | 月陆 | 月陆 |
| 39 | 112.54 | 109.55 | 2.99 | 月陆 | 月陆 |
| 40 | 111.04 | 121.44 | -10.40 | 月海 | 月海月陆过渡 |
| 41 | 109.41 | 119.46 | -10.05 | 月海 | 月海 |
| 42 | 109.36 | 116.78 | -7.43 | 月海 | 月海 |
| 43 | 109.34 | 118.58 | -9.24 | 月海 | 月海 |
| 44 | 115.07 | 109.44 | 5.63 | 月陆 | 月陆 |
| 45 | 122.85 | 109.95 | 12.90 | 月陆 | 月陆 |
| 46 | 115.20 | 109.26 | 5.93 | 月陆 | 月陆 |
| 47 | 124.51 | 109.74 | 14.77 | 月陆 | 月陆 |
| 48 | 119.92 | 108.75 | 11.17 | 月陆 | 月陆 |
Tab. 8 Assessment of automatic identification of lunar geomorphology表8 月貌自动识别结果评价 |
| 类别 | 月海 | 月陆 | 总体 |
|---|---|---|---|
| 识别正确数 | 12 | 24 | 36 |
| 识别错误数 | 3 | 3 | 6 |
| 识别率(%) | 80 | 88.90 | 85.74 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}