
面向智能导游的双加权图模型及其路径规划
作者简介:史永(1977-),男,博士生,副教授,山东滕州人,主要从事智能计算与内容服务,位置服务技术研究。E-mail:shiy_tz@163.com
收稿日期: 2014-03-24
要求修回日期: 2014-06-03
网络出版日期: 2014-11-01
基金资助
国家自然科学基金项目“基于多时空粒度的旅游行程链模型与游客行为模式研究”(41301144)
常熟市海内外领军型创业创新人才项目“新一代智能行人导航技术及其产业化应用”(CSRC1130)
江苏省“青蓝工程”(2010)项目
南京市发改委项目“城市休闲智慧信息服务系统”
Research on Double-Weighted Graph Model and Optimal Path Planning for Intelligent Tourism Navigation Considering Entrances and Exits
Received date: 2014-03-24
Request revised date: 2014-06-03
Online published: 2014-11-01
Copyright
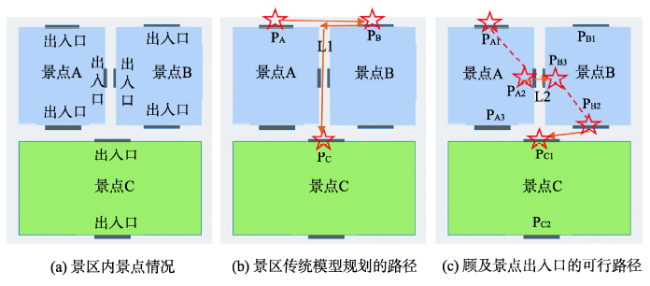
景区游览线路是游客游览不同景点的有效选择路径。在导航系统中通常结合各景点POI(Point of Interest)和景区路网的路径规划而生成,但是,针对具有一定范围与多出入口的景点(如建筑物类景点),单一的POI坐标描述机制规划产生的游览路径,往往与智能导游应用中实际可行的最优游览路径存在明显差异。本文分析了景点大小、多出入口等特征对景区游览路径规划的影响,提出了顶点和边的权重均可动态选择的景区双加权图模型,突破了单一POI描述机制的限制。同时,讨论了景区双加权图模型的化简、构建方法,并以Dijkstra算法和Prim算法为基础,给出了其最优路径规划求解算法。实验表明,本文模型及其最优路径规划算法所得结果更为优化与合理,具有较少的游览规划距离和更为紧凑的游览过程安排。
史永 , 龙毅 , 陈林 , 吴小玲 . 面向智能导游的双加权图模型及其路径规划[J]. 地球信息科学学报, 2014 , 16(6) : 867 -873 . DOI: 10.3724/SP.J.1047.2014.00867
When visiting multiple tourist scenic spots, a recommended travel line is usually the most effective route designed for tourists according to the actual road situations. In the field of intelligent tourism navigation, a traditional recommended travel line is mainly generated by path planning algorithm automatically, considering thescenic spots’ positions and road networks based on graph model. Normally, the traditional algorithms firstly map scenic spots (which belong to certain scenic area) into points of interests (POIs),and map the road network that links these POIs into a line collection, then build the corresponding graph model. But when a scenic spot has a limited area and involves multiple entrances or exits(for example buildings with multiple indoor space), the traditional described mechanism for single point coordinates is difficult to reflect these structural features. In reality, scenic area path planning is widely applied in the field of mobile tourism guide recently, especially for pedestrians. There exist significant differences between theoretical optimal paths and actual optimal paths, sincetouristsare inclined to have more choices. In order to solve this problem, this paper analyzed various influences on the process of path planning, caused by scenic spots’ own structural features (such as the size, shape and entrance), and focused on the influences of multiple entrances or exits located within the scenic area. Then,we proposed a Double-Weighted Graph Model considering multiple entrances and exits for tourist scenic area, and the weights of both vertexes and edges of the proposed model can be selected and weighted dynamically. Next, we discussed the building method for the model, and proposed an optimal path planning algorithm based on Dijkstra algorithm and Prim algorithm. Experimental results show that the optimal planned travel line derived from this proposed model and algorithms is considerably reasonable, and the travelling order and travelling distance can be further optimized.
Fig. 1 Sketch maps of planned routes for touring scenic spot A, B and C图1 游览景点A,B,C最优路径规划示意图 |
Tab. 1 Influence on path planning from scenic spots’entrances or exits表1 景点多出入口特征对路径规划的影响 |
| 景点分类 | 特征描述 | 路径规划影响 |
|---|---|---|
| 点状景点(POI) | 景点无内部路网或有1个出入口 | 一种离开方式,对下一个景点选择及线路规划距离均无影响 |
| 线状景点(LOI) | 景点有2个出入口 | 2种离开方式,景点内路网为景区唯一路网时,对下一个景点选择不产生影响;由于游览过程即是行程过程,会对规划距离产生影响 |
| 面状景点(AOI) | 景点多于2出入口 | 多种离开方式,对下一个景点选择会产生影响,同时会对规划距离产生影响 |
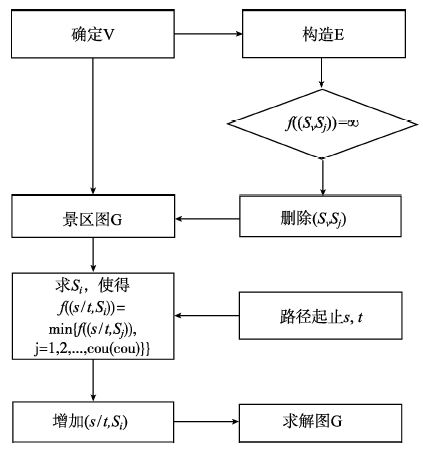
Fig. 2 Building procedure of scenic graph图2 景区图G构建过程 |
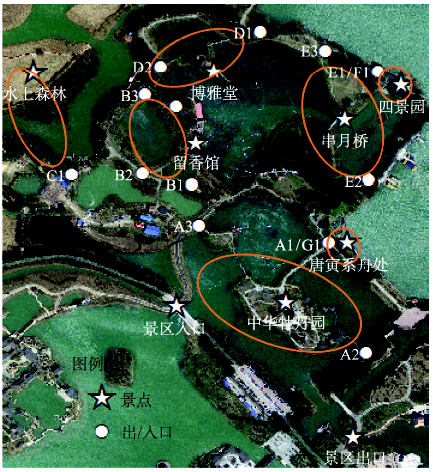
Fig. 3 Remote sensing image of experiment area图3 实验区影像图 |
Tab. 2 Information of experiment area structure表2 实验区地理背景 |
| 景点名称 | 景点编号 | 出入口编号 | 景点类型 |
|---|---|---|---|
| 牡丹园 | A | A1,A2,A3 | AOI |
| 留香馆 | B | B1,B2,B3 | AOI |
| 水上森林 | C | C1 | POI |
| 博雅堂 | D | D1,D2 | LOI |
| 串月桥 | E | E1,E2,E3 | AOI |
| 四景园 | F | F1(=E1) | POI |
| 唐寅系舟处 | G | G1(=A1) | POI |
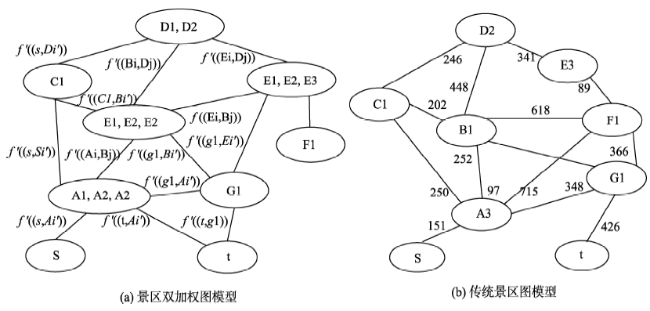
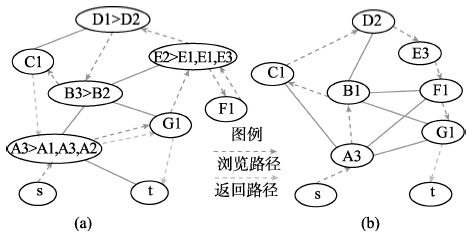
Fig. 4 Graph model of experiment area图4 景区图模型 |
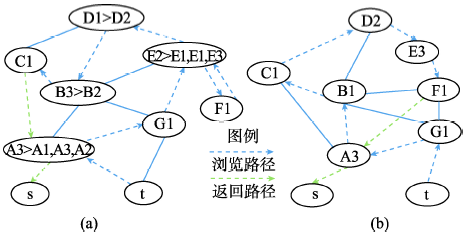
Fig. 5 Comparative analysis of optimal path from s to t图5 从s到t最优路径比较 |
Fig. 6 Comparative analysis of optimal path from t to s图6 从t到s最优路径比较 |
Tab. 3 Results of path planning of experiment area表3 最优游览路径规划结果 |
| 线路方向 | 使用模型 | 路径安排 | 规划距离 | 结果分析 |
|---|---|---|---|---|
| 入口到出口 | 传统模型 | s,A3,TA,B1,TB,C1,TC,D2,TD,E3,TE,F1, TF,G1,TG,t | 总长1918 m,其中,游览路径1492 m,返回路径426 m | 景点游览次序发生变化,且本文模型使得规划距离缩短406 m |
| 本文模型 | s,A3,TA,A1,G1,TG,E2,TE,E1,TF,E2,D2, TD,D1,B3,TB,B2,C1,TC,A3,G1,t | 总长1512 m,其中,游览路径586 m,返回路径926 m | ||
| 出口到入口 | 传统模型 | t,G1,TG,F1,TF,E3,TE,D2,TD,C1,TC,B1, TB,A3,TA,A3,s | 总长1918 m,其中,游览路径1767 m,返回路径151 m | 景点游览次序发生变化,且本文模型规划使得距离缩短858 m |
| 本文模型 | t,A2,TA,A1,G1,TG,E2,TE,F1,TF,E3, D2,TD,D1,B3,TB,B2,C1,TC,A3,s | 总长1060 m,其中,游览路径659 m,返回路径401 m |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}