
球形全景影像核线方程推导及其应用
作者简介:刘帅(1979-),男,博士,副教授,研究方向为GIS三维建模、计算机视觉与虚拟增强现实。E-mail:liushuai_csu@126.com
收稿日期: 2014-05-19
要求修回日期: 2014-08-09
网络出版日期: 2015-03-10
基金资助
国家自然科学基金项目“基于球形投影几何的多分辨率全景三维建模研究”(41201418)
国家自然科学基金项目(40971240、41301442)
国家科技支撑项目(2012BAK12B02)
The Derivation and Application of Spherical Panoramic Epipolar Geometry
Received date: 2014-05-19
Request revised date: 2014-08-09
Online published: 2015-03-10
Copyright
核线约束是影像在数字摄影测量中的一项核心技术,可限制同名像点的搜索范围,显著提高计算效率和可靠性。目前,核线约束在传统中心投影影像与卫星扫描影像上取得了广泛的应用,而全景影像具有不同的几何模型,核线模型的推导与应用存在很大的难度。以往实现全景三维重建方法大多通过不同方位影像,应用大量的控制点,结合光束法平差以实现构筑物三维重构,缺乏球形全景核线数学方程的推导及应用。鉴此,本文通过对球形全景影像的投影几何研究,基于共面方程建立该类影像的核线几何模型,推导出数学方程及其特性,为核线在球形全景影像中的应用提供了理论基础,实验表明该球形全景核线方程的正确性与可行性。
刘帅 , 陈军 , 孙敏 , 赵伶俐 . 球形全景影像核线方程推导及其应用[J]. 地球信息科学学报, 2015 , 17(3) : 274 -280 . DOI: 10.3724/SP.J.1047.2015.00274
Epipolar geometry is a core issue in close-range digital photogrammetry, which could reduce the search range to improve both calculation efficiency and reliability of matching. Currently, epipolar constraint has achieved a wide range of applications based on the traditional pinhole projection images and satellite images. However, panoramic epipolar geometry is different from the other images because of its peculiar geometric modeling. Panorama can provide 360-degree view in one hotspot. Apart from the visualization for scene browsing, users generally pay more attention to spatial measurable information within the field of survey. The previous works on panorama mainly focused on panoramic image stitching and panoramic camera. In recent years, people started to pay attention to panoramic three-dimensional reconstruction, which is mainly applied to city buildings and other artificial objects. Implemented by the conventional imaging sequences method, it generally needs complex calculations, numerous control points and a bundle of adjustments to reconstruct the object,which lacks relevant researches and applications of spherical panoramic epipolar geometry. In fact, panorama itself is a type of modeling, if has the scalability, it could be taken as a method for landscape expression as the supplement of the existing three-dimensional object modeling in 3D GIS. Moreover, the panoramic epipolar constraint can improve the reliability, accuracy and speed of matching. However, this constrain has not been fully applied to the 3D information processing of spherical panorama. The paper focuses on the epipolar geometry for spherical panorama, and constructs the epipolar geometry based on the coplanar equation. Then, we derive the mathematical equations and their properties, thus provide a theoretical basis for the spherical panoramic epipolar line that could be used in the close-range digital photogrammetry. The experiment results show that the epipolar line is effectively validated, which can reduce the search range and obtain more useful information.
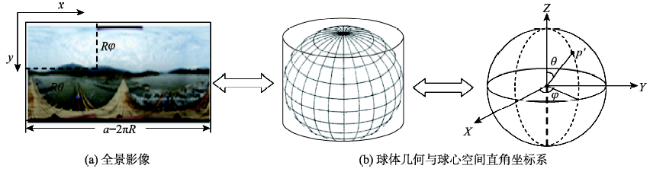
Fig. 1 Spherical panoramic images and virtual sphere texture mapping diagram图1 球面全景影像与虚拟球体纹理映射示意图 |
Fig. 2 The latitude-longitude projection relation between spherical coordinates and the panoramic image coordinate of sphere图2 球面全景影像与虚拟球体坐标的经纬投影关系图 |
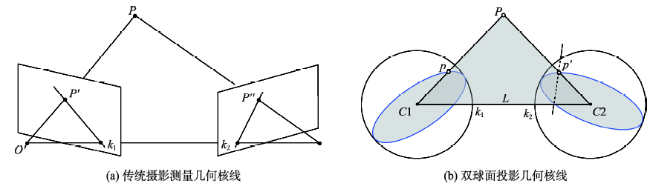
Fig. 3 Traditional photogrammetry epipolar geometry and double spherical projective geometry图3 传统摄影测量几何核线与双球面投影几何核线 |
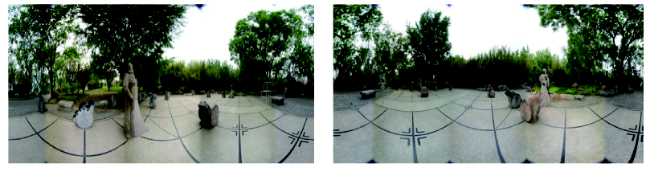
Fig. 4 Panoramic stereo pair acquisition图4 全景影像对的获取 |
Fig. 5 The flowchart of the experimental design图5 实验设计流程图 |
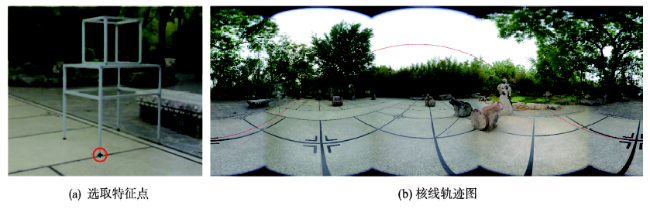
Fig. 6 The feature point and the corresponding epipolar line图6 特征点核线轨迹示意图 |
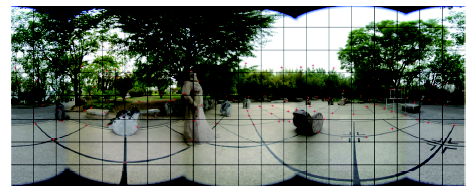
Fig. 7 The epipolar line of the spherical panorama verification chart图7 球形全景核线轨迹验证示意图 |
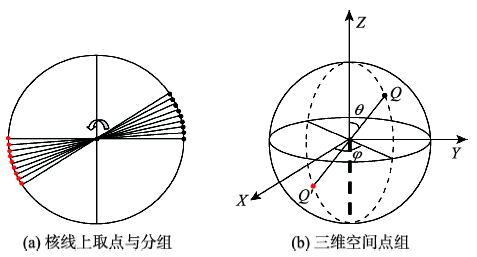
Fig. 8 The regional division and distribution of feature points图8 区域划分与特征点分布图 |
Fig. 9 The application of epipolar line and an example of its deviation from the corresponding point (part of the screenshot)图9 核线应用及其对应特征点的偏离关系图(部分截图) |
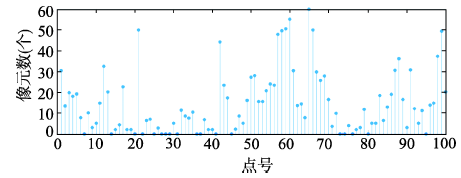
Fig. 10 The errors of the feature points deviating from the corresponding epipolar line图10 特征对应点偏离核线误差图 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}