
基于路网拓扑层次性表达的驾车路径规划方法
作者简介:刘康(1991-),山东临沂人,博士生,研究方向为交通GIS、复杂网络分析。E-mail: liukang@lreis.ac.cn
收稿日期: 2015-02-15
要求修回日期: 2015-04-25
网络出版日期: 2015-09-07
基金资助
国家自然科学基金项目(41271408、41401460)
A Driving Route Planning Method Based on Road Network Topological Hierarchy Expression
Received date: 2015-02-15
Request revised date: 2015-04-25
Online published: 2015-09-07
Copyright
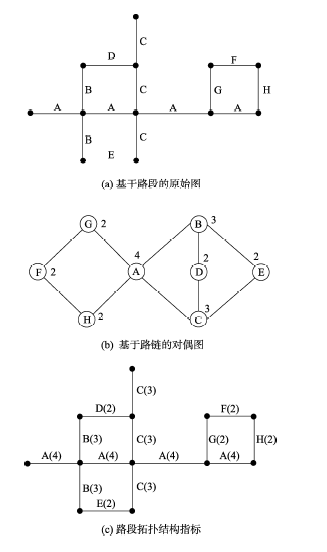
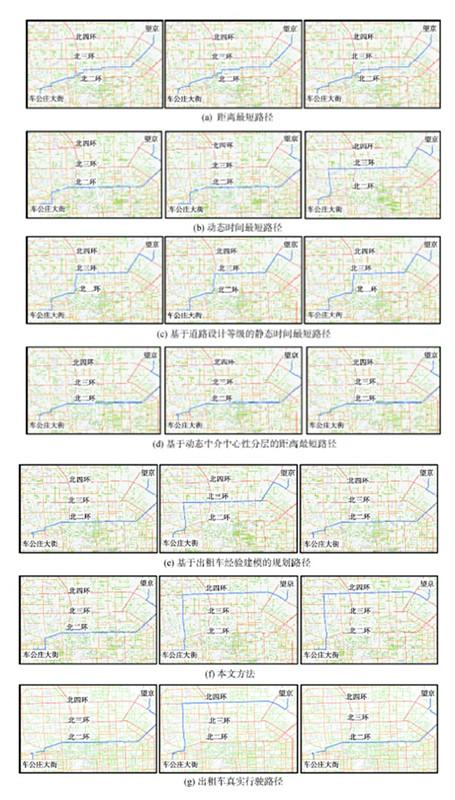
人对所处客观世界的认识具有显著的空间层次特征,可指导出行路径规划过程。常用的层次空间推理的分层路径计算方法,虽顾及了路网的层次性特征,但道路规划等级与人对路网的层次性认知往往并不一致。而道路网络自身的拓扑结构可客观反映道路重要程度,以及出行者对道路的层次性认知经验。本文以拓扑结构指标表达道路的层次性特征,以此规划驾车出行路径,并通过与出租车行驶路径的匹配度及距离最短路径耗时比评价路径规划结果的合理性。研究结果表明,基于路网拓扑层次性表达的规划路径优于距离最短路径、动态时间最短路径、基于道路等级的静态时间最短路径及基于动态中介中心性分层的距离最短路径,与基于出租车经验建模的路径规划结果相当。但本文所提出的方法不需出租车经验建模所依赖的浮动车系统支持,更利于部署应用。
刘康 , 段滢滢 , 张恒才 . 基于路网拓扑层次性表达的驾车路径规划方法[J]. 地球信息科学学报, 2015 , 17(9) : 1039 -1046 . DOI: 10.3724/SP.J.1047.2015.01039
Mental representations of spatial knowledge are organized hierarchically. This should be introduced to route guidance in order to reduce the cognitive workload of drivers, and to increase drivers′ satisfaction and wayfinding success probability. The most commonly used hierarchical spatial reasoning based route planning methods take the hierarchical characteristic of road network into consideration, but the road design grade used in these methods does not conform to human′s hierarchy recognition of road network. In this paper, we introduce the complex network analysis methods, and take use of topological structure measures to express roads′ hierarchical characteristic. And on this basis, we propose a novel route planning method. The planned routes are compared to the taxi driving routes in reality and the travelling time decrements are calculated by comparing these routes to the distance shortest route. The experimental results indicate that, the routes that are planned using our method are more rational and optimal than the distance shortest routes, dynamic time shortest routes, road grade based time shortest routes and dynamic betweenness centrality hierarchy based routes, and are equivalent to the empirical taxi driving model based routes. Moreover, our method does not need the support of floating car system, hence it is more practical for promotion and application.
Fig. 1 Measurement process of road segments’ status图1 路段拓扑结构地位度量 |
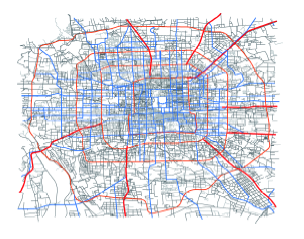
Fig. 2 Experimental road network图2 实验路网 |
3.2.2 路径耗时评价
本文分别计算相同OD及出发时间下,不同规划算法所得路径相比于距离最短路径的出行耗时减幅,每条路径的出行耗时减幅计算公式如式(8)所示。Tab. 2 Decrements of the traveling time for routes planned by different methods compared with the distance shortest route表2 不同路径相比于距离最短路径的出行耗时减幅 |
| 方法 | 平均值(%) | 最小值(%) | 最大值(%) | 标准差 |
|---|---|---|---|---|
| 距离最短路径 | 0.00 | 0.00 | 0.00 | 0.000 |
| 动态时间最短路径 | 10.03 | -28.88 | 74.85 | 0.156 |
| 基于道路等级的时间最短路径 | 2.23 | -211.31 | 70.75 | 0.225 |
| 基于动态BC分层的最短路径 | 4.81 | -211.31 | 70.75 | 0.185 |
| 基于出租车经验建模的最短路径 | 6.48 | -311.58 | 70.75 | 0.204 |
| 本文方法 | 5.46 | -214.07 | 70.75 | 0.206 |
Fig. 3 Comparison of different route planning methods图3 不同算法规划路线对比图 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}