
基于遥感影像的卫星颤振探测分析的关键技术与实现
作者简介:王凤香(1989-),女,硕士生,研究方向为高分辨率遥感卫星姿态颤振的补偿方法。E-mail: wangfx1228@sina.com
收稿日期: 2015-01-04
要求修回日期: 2015-03-18
网络出版日期: 2015-06-10
基金资助
国家自然科学基金项目(41401531、41325005、41171352)
上海市青年科技英才扬帆计划项目(14YF1403300)
同济大学青年优秀人才培养行动计划项目
地理信息工程国家重点实验室开放基金(SKLGIE2014-3-3)
Research on Key Technology and Implementation of Detection and Analysis of Satellite Attitude Jitter using Remote Sensing Imagery
Received date: 2015-01-04
Request revised date: 2015-03-18
Online published: 2015-06-10
Copyright
姿态颤振是高分辨率卫星普遍存在的复杂现象,随着卫星的复杂性和敏捷性的提高,故其对成像质量的影响机制和相应的探测与补偿方法,成为高分辨率卫星对地观测研究的关键问题。本文介绍了基于遥感影像的卫星颤振探测原理和关键技术,利用传感器的构造特点,通过不同波段的多光谱影像,以及不同视角的全色立体影像间的密集匹配精确量测和获取影像视差差异值,反演卫星姿态颤振的规律和特性,从而对规律性的颤振现象进行建模和补偿。鉴于上述理论,在Visual C++的平台下,研制了卫星颤振探测分析系统,设计了以计算机性能优化的图像分块并行算法。测试结果表明,该软件能有效探测出0.1像元偏移的卫星姿态颤振,并可对规律性颤振进行建模和补偿,有较好的稳定性和并行效率。其已成功应用于资源三号卫星地面应用系统,并可扩展于其他卫星系统的颤振探测分析。
王凤香 , 刘世杰 , 童小华 , 唐新明 , 徐聿升 , 叶真 , 李凌云 , 谢俊峰 , 李天鹏 , 洪中华 . 基于遥感影像的卫星颤振探测分析的关键技术与实现[J]. 地球信息科学学报, 2015 , 17(6) : 724 -731 . DOI: 10.3724/SP.J.1047.2015.00724
With the development of high resolution satellites, the attitude jitter, which is a common and complex phenomenon, has become a key problem in the applications of high resolution remote sensing images. It leads to the degradation of image quality, and non-steady and lower precision for the attitude measurement data. Therefore, in this paper, a jitter detection and analysis method based on remotely sensed imagery is proposed. It took the advantage of the imagery data to detect jitter without additional involvement of high-performance sensors or a large quantity of GCPs. Two different jitter detection methods for different types of sensors are presented, which consist of: (1) jitter detection methods based on multispectral images utilizing parallax between two different bands in the image, and (2) jitter detection methods based on stereo images using triplet stereo images and rational polynomial coefficients (RPCs). With the jitter detection methods, the relative registration error is obtained. Afterwards, we can retrieve the time-dependent attitude jitter. Consequently, the frequency and amplitude of the attitude jitter can be achieved by analyzing and modeling the jitter using cosine functions. To reduce the jitter effect on geo-positioning process, the true attitude information should be estimated from the detected jitter components. An improved sensor model is introduced to take into account the compensation for the attitude jitter. The performance of the improved sensor model is assessed in direct georeferencing. Experiments are conducted with images acquired from the first civilian three-line-array stereo mapping satellite ZY-3. A periodic pattern with a frequency of about 0.65Hz has been detected. Based on the theories and methods mentioned above, the detection and analysis of satellite attitude jitter system based on remote sensing imagery has been developed using VC++. An image sub-blocking and a parallel computation scheme based on the computer performance is performed, which can improve the efficiency. Test results show that the system can efficiently detect the attitude jitter of 0.1 pixels. Meanwhile, it can model the regular jitter and correct the jitter effect on geo-positioning process. The accuracies for the plain and height directions are improved from 2.1799 m and 3.2497 m to 1.4396 m and 0.7453 m, respectively. This system has a good stability and robustness and has been successfully applied to the ZY-3 ground application system.
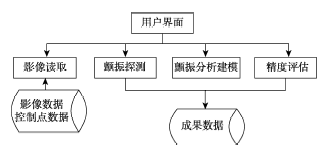
Fig. 1 Software function modules图1 软件功能模块 |
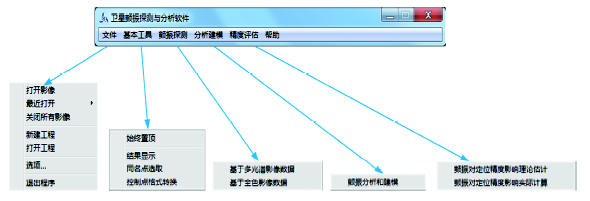
Fig. 2 The system main interface图2 系统主界面 |
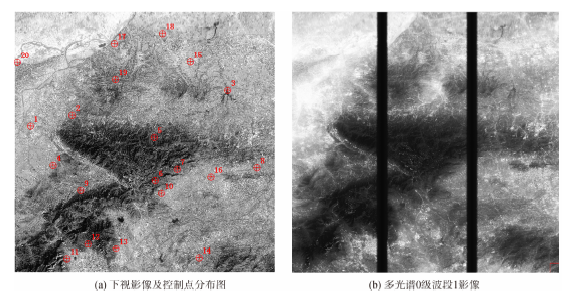
Fig. 3 Nadir Image and distribution of GCPs and multispectral band 1 raw image of Songshan area图3 河南嵩山地区全色与多光谱影像图 |
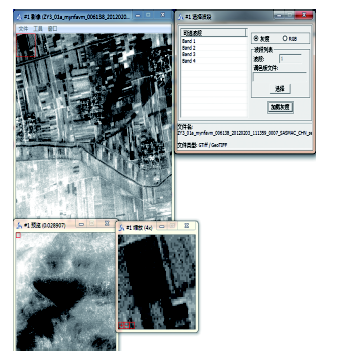
Fig. 4 The image display interface图4 影像显示界面 |
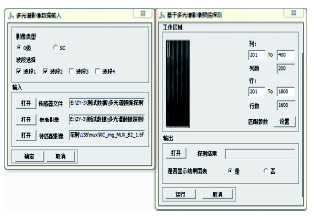
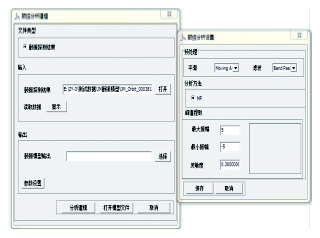
Fig. 5 Interface of jitter detection based on multispectral images图5 多光谱影像颤振探测界面 |
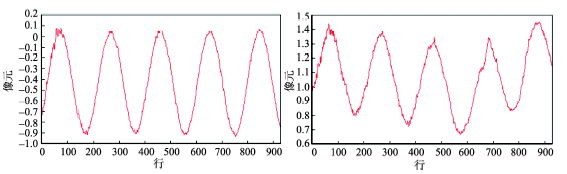
Fig. 6 Jitter detection results for mulita-spectral images图6 多光谱影像颤振探测结果 |
Fig. 7 Interface for jitter detection of panchromatic images图7 全色影像颤振探测界面 |
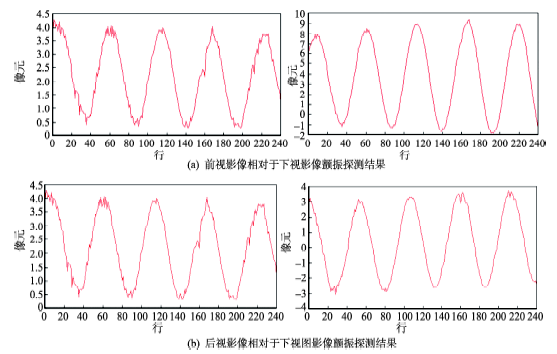
Fig. 8 Jitter detection results for panchromatic images图8 全色影像颤振探测结果 |
Fig. 9 Jitter analysis interface图9 颤振分析界面 |
Tab. 1 The Jitter detection and modeling result based on multispectral images of Songshan area表1 嵩山地区多光谱影像颤振探测和拟合模型结果 |
| 垂轨方向 | 沿轨方向 | ||||
|---|---|---|---|---|---|
| 模型参数 | 频率(Hz) | 0.65 | 频率(Hz) | 0.65 | |
| 幅值(像元) | 0.46 | 幅值(像元) | 0.28 | ||
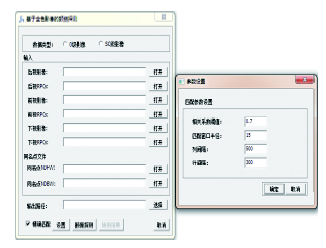
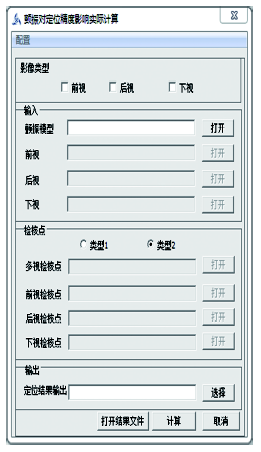
Fig. 10 Estimation of jitter impact on positioning accuracy interface图10 颤振对定位精度影响分析界面 |
Tab. 2 The statistical results of stereo geometric accuracies before and after the jitter compensation表2 颤振补偿前后的控制点定位精度的统计结果 |
| 精度 | 平面(m) | 高程方向(m) | |||
|---|---|---|---|---|---|
| 补偿前 | 补偿后 | 补偿前 | 补偿后 | ||
| 最大值 | 2.8854 | 3.0369 | 4.7108 | 1.6859 | |
| 均方差 | 2.1799 | 1.4396 | 3.2497 | 0.7453 | |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
Iwasaki, A. detection and estimation satellite attitude jitter using remote sensing imagery[C]. Advances in Spacecraft Technologies, InTech, 2011:257-272.
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}