
正八面体的六边形离散格网系统生成算法
作者简介:贲 进(1977-),男,博士,副教授,研究方向为空间数据模型、数字摄影测量。E-mail: benj@lreis.ac.cn
收稿日期: 2014-12-31
要求修回日期: 2015-03-05
网络出版日期: 2015-07-08
基金资助
国家自然科学基金项目(41271391、41201392)
中国博士后基金特别资助项目(2013T60161)
资源与环境信息系统国家重点实验室2013年度开放基金项目
Construction Algorithm of Octahedron Based Hexagon Grid Systems
Received date: 2014-12-31
Request revised date: 2015-03-05
Online published: 2015-07-08
Copyright
全球离散格网系统是一种面向全球的新型多分辨率数据建模与表达解决方案。与三角形和四边形格网相比,六边形格网具有对称性好、采样效率高、一致相邻等特点,更利于地球空间信息的建模、整合与分析。本文提出一种能生成各种六边形格网系统的算法,将正八面体上的相邻三角面组合为“四边形逻辑结构”,建立三轴离散斜坐标系,描述不同六边形剖分产生的多分辨率格网。其采用面向对象的思想设计了软件模型,通过实验验证了算法的可行性,分析了算法的效率。结果表明,该算法采用统一的数学模型描述正八面体上各种类型六边形剖分产生的离散格网系统,对应的软件模型,将不同格网系统的共性特征和个性特征分离,便于维护和扩展,具有一定的灵活性。
贲进 , 童晓冲 , 周成虎 , 张凯欣 . 正八面体的六边形离散格网系统生成算法[J]. 地球信息科学学报, 2015 , 17(7) : 789 -797 . DOI: 10.3724/SP.J.1047.2015.00789
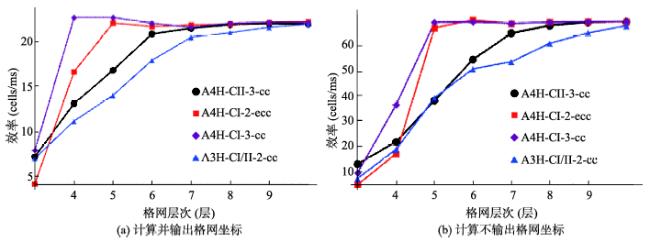
A Discrete Global Grid System (DGGS) is a set of related global grids at various scales which tessellate the earth into areal cells and associated cell points. As a promising global reference model it supports fast, seamless assimilation of numerous and disparate geo-data sources and sensor networks, regardless of scale, origin, datum, or projection. Compared with square and triangle grids, hexagon grids are uniform adjacency and they have better symmetry and more quantizing efficiency. These properties have made hexagon grids the potential data structure for massive geospatial modeling, integration and analysis. This paper presents a new octahedron-based construction algorithm which yields all types of hexagon DGGSs. It combines two adjacent triangle facets of an octahedron into a logical quad structure on which a three-axis coordinate system is established to describe the location of multi-resolution grid cells produced by different types of hexagon partitions. According to the characteristics of the algorithm, an object oriented software model is designed. Experiments are carried out to examine the feasibility, validity and efficiency of the model. The results indicate that the proposed algorithm employs a uniform mathematical model to describe all types of hexagon DGGSs. The corresponding software model separates the unique features of an individual DGGS from the commonness of all DGGSs, which makes the model extendable and flexible. The results also reveal that the efficiency of the algorithm remains stable regardless the increase of partition level. Two dominant factors are found to be responsible to the phenomenon. One is the maximum processing ability of the computer in which the experiments were carried out. The other is the I/O bottleneck of the computer which makes the CPU idle during the procedure of data export.
Key words: Discrete Global Grid System; octahedron; hexagon; construction; algorithm
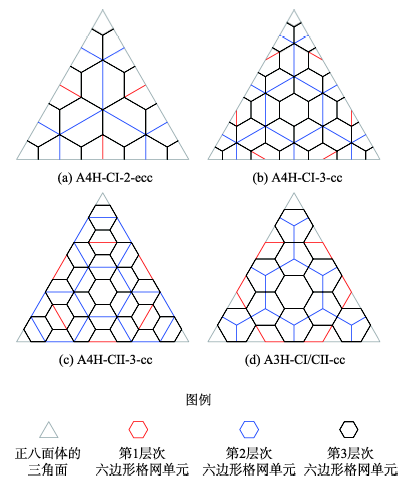
Fig. 1 Hexagonal recursive subdivision on a triangular face图1 三角面上的六边形层次剖分 |
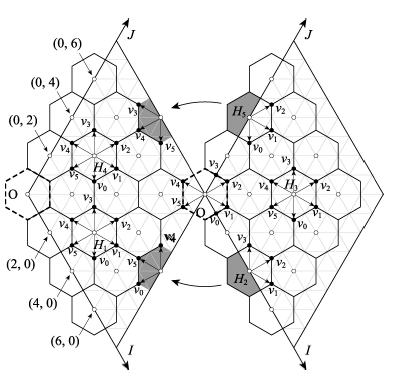
Fig. 2 Discrete grid coordinate system图2 离散格网坐标系 |
Tab. 1 Parameters of discrete grid coordinate system表1 离散格网坐标系参数 |
| 参数 | 计算公式 |
|---|---|
| 边长等分数(频率) | |
| I/J坐标取值范围 | |
| I/K/J坐标步长向量 |
Tab. 2 Amount of cells on a logical quad structure表2 四边形上的单元个数 |
| 格网系统 | 计算公式 |
|---|---|
| A4H-CI-2-ecc | |
| A4H-CI-3-cc | |
| A4H-CII-3-cc | |
| A3H-CI/II-cc |
Fig. 3 Construction of A4H-CI-2-ecc grid system图3 A4H-CI-2-ecc格网系统生成 |
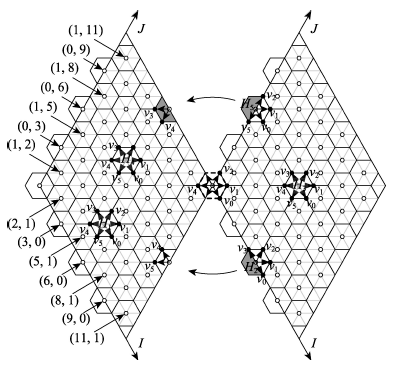
Fig. 4 Construction of A4H-CI-3-cc grid system图4 A4H-CI-3-cc格网系统生成 |
Fig. 5 Construction of A4H-CII-3-cc grid system图5 A4H-CII-3-cc格网系统生成 |
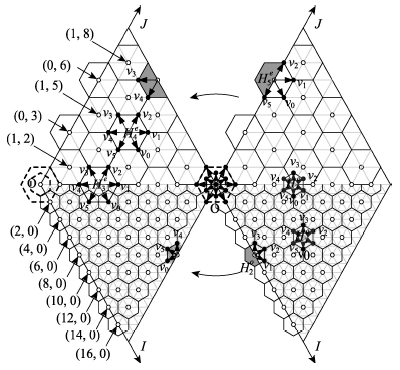
Fig. 6 Construction of A3H-CI/II-3-cc grid system图6 A3H-CI/II-3-cc格网系统生成 |
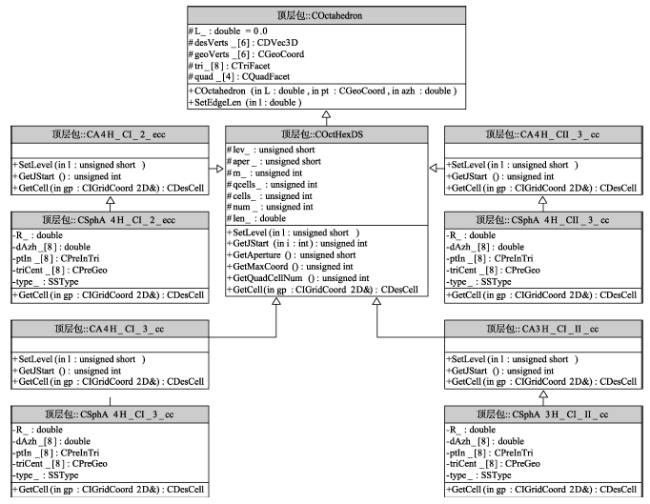
Fig. 7 Class relationships of the software model图7 软件模型类结构 |
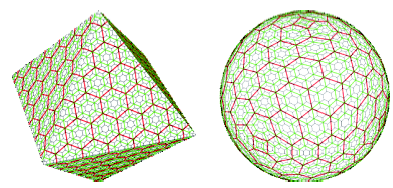
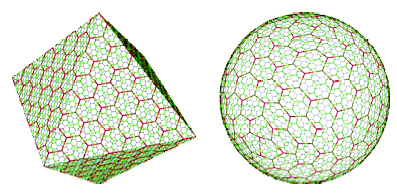
Fig. 8 A4H-CI-3-cc discrete grid systems图8 A4H-CI-3-cc离散格网系统 |
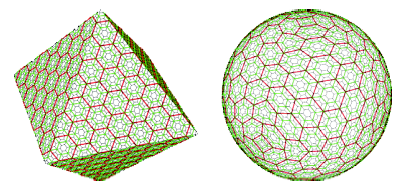
Fig. 9 A4H-CII-3-cc grid systems图9 A4H-CII-3-cc离散格网系统 |
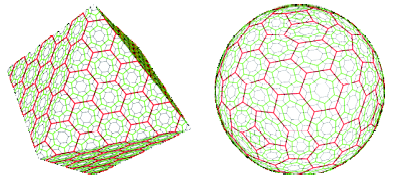
Fig. 10 A3H-C12-cc grid systems图10 A3H-CI/II-cc离散格网系统 |
Fig. 11 A4H-CII-3-ecc subdivision图11 A4H-CII-3-ecc剖分示意图 |
Tab. 3 Alternation rules of starting coordinate of J表3 J坐标初始值的变化规律 |
| 面号 | 层次 | |
|---|---|---|
| 奇数层 | 偶数层 | |
| 、 | ||
| 、 | ||
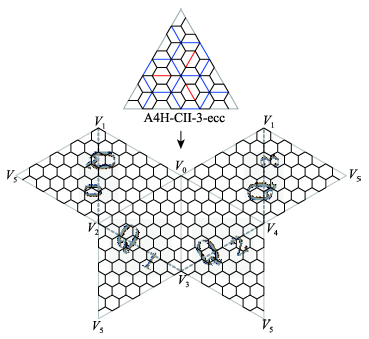
Fig. 12 A4H-CII-3-ecc grid systems图12 A4H-CII-3-ecc离散格网系统 |
Tab. 4 Statistics of the executive time for ‘cell coordinates calculation and output’ case表4 “计算并输出格网坐标”执行时间统计 |
| 层次 | 类型 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| A4H-CI-2-ecc | A4H-CI-3-cc | A4H-CII-3-cc | A3H-CI/II-cc | ||||||||
| 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | ||||
| 3 | 66 | 16.000 | 146 | 18.585 | 194 | 27.217 | 110 | 15.789 | |||
| 4 | 258 | 15.584 | 578 | 25.682 | 770 | 59.149 | 326 | 29.406 | |||
| 5 | 1026 | 46.796 | 2306 | 102.462 | 3074 | 183.797 | 974 | 69.841 | |||
| 6 | 4098 | 190.198 | 9218 | 420.990 | 12 290 | 592.318 | 2918 | 163.602 | |||
| 7 | 16 386 | 755.080 | 36 866 | 1718.534 | 49 154 | 2301.864 | 8750 | 429.595 | |||
| 8 | 65 538 | 3004.401 | 147 458 | 6738.781 | 196 610 | 9044.530 | 26 246 | 1256.872 | |||
| 9 | 262 146 | 11 915.727 | 589 826 | 26 822.465 | 786 434 | 35 952.912 | 78 734 | 3669.043 | |||
| 10 | 1 048 578 | 47 541.621 | 2 359 298 | 107 450.836 | 3 145 730 | 144 432.048 | 236 198 | 10 835.268 | |||
Tab. 5 Statistics of the executive time for ‘cell coordinates calculation only’ case表5 “计算不输出格网坐标”执行时间统计 |
| 层次 | 类型 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| A4H-CI-2-ecc | A4H-CI-3-cc | A4H-CII-3-cc | A3H-CI/II-cc | ||||||||
| 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | 单元总数(个) | 执行时间(ms) | ||||
| 3 | 66 | 15.000 | 146 | 16.000 | 194 | 15.319 | 110 | 16.000 | |||
| 4 | 258 | 15.483 | 578 | 16.000 | 770 | 36.028 | 326 | 17.715 | |||
| 5 | 1026 | 15.385 | 2306 | 33.489 | 3074 | 81.151 | 974 | 25.024 | |||
| 6 | 4098 | 61.452 | 9218 | 133.769 | 12 290 | 226.962 | 2918 | 96.053 | |||
| 7 | 16 386 | 239.961 | 36 866 | 539.189 | 49 154 | 761.228 | 8750 | 164.332 | |||
| 8 | 65 538 | 951.799 | 147 458 | 2143.378 | 196 610 | 2907.658 | 26 246 | 433.288 | |||
| 9 | 262 146 | 3800.154 | 589 826 | 8545.478 | 786 434 | 11 422.591 | 78 734 | 1216.758 | |||
| 10 | 1 048 578 | 15 209.788 | 2 359 298 | 34 110.661 | 3 145 730 | 45 598.220 | 236 198 | 3497.986 | |||
Fig. 13 Efficiency curves of grid cell processing图13 格网处理效率曲线 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}