
基于航向角变化的趋势集合轨迹特征划分算法
作者简介:李翔(1987-),男,博士生,研究方向为GIS辅助定位技术、嵌入式导航。E-mail: ryolx13@126.com
收稿日期: 2015-03-16
要求修回日期: 2015-04-30
网络出版日期: 2015-10-10
基金资助
国家自然科学基金项目(41271450、41471336);“十二五”国家科技支撑计划项目(2012BAK12B02)
An Extraction Algorithm of Track Features Based on Trend Set of Heading Angle Variable
Received date: 2015-03-16
Request revised date: 2015-04-30
Online published: 2015-10-10
Copyright
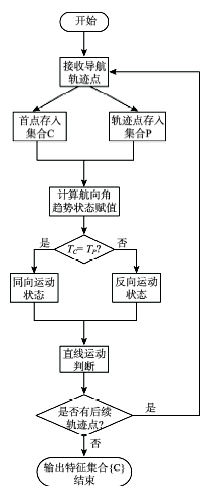
在GPS或网络信号受到干扰或遮蔽时,导航精度和自主性会大大降低,组合导航技术能弥补这一缺陷。针对组合导航匹配实时、快速和准确的应用需求,本文提出一种具有实时性、高准确性的基于航向角变化的趋势集合特征划分算法。该算法通过计算轨迹点的航向角变化量,对趋势确定集合和趋势待定集合的趋势状态进行赋值,能有效地划分出轨迹上各段的特征点集合。算法还对由外界因素(如超车、紧急避让和驾驶员不同驾驶习惯等)引起的无效特征情况,进行趋势集合状态的分析和判断,以保证特征划分的准确性。本文以北京西五环地区的车辆轨迹数据为例,进行了实地跑车实验表明,基于航向角的趋势集合特征划分算法,在实时性和提取效果方面,具有明显的优势,算法简单可行、高效、可操作性强。
李翔 , 张江水 , 杨柏欣 , 王希 . 基于航向角变化的趋势集合轨迹特征划分算法[J]. 地球信息科学学报, 2015 , 17(10) : 1172 -1178 . DOI: 10.3724/SP.J.1047.2015.01172
When the GPS or a network signal is disturbed or obscured, the precision and autonomy of navigation will be greatly reduced. The integrated navigation technology can compensate for this defect. In view of the application requirements of real-time, quickness and accuracy of trail data and road data during the integrated navigation process, this paper puts forward a real-time, high accuracy algorithm which is entitled as an extraction algorithm of track features based on trend set of heading angle variable. The algorithm picks up the calculation and analysis of heading angle in trail data points for navigation, assigns values to the confirmed trend set and the pending trend set innovatively, which effectively improve the real-time aspect and the accuracy of this algorithm in the navigation trajectory data extraction, ensuring the efficiency and precision of the integrated navigation. This algorithm also provides analysis and judgment on trend set status for the invalid features which is caused by external factors (e.g. the overtaking, the emergency avoidance and the drivers’ driving habits). The invalid features will be filtered and eliminated using the buffer of the pending trend set, ensuring the accuracy of the feature extraction. The vehicle trajectory data in Beijing is used for conducting experiments. The results show that the extraction algorithm of track features based on trend set of heading angle variable has obvious advantages in real-time application and extracting effect, and the buffer judging with the pending trend set is able to rule out some invalid features and interferences caused by external factors. The proposed algorithm is not only simple and feasible, but also has high efficiency and strong maneuverability.
Key words: integrated navigation; trend sets; set status; heading angle; extraction of features
Tab. 1 An extraction algorithm of track features based on the trend set of heading angle variable表1 基于航向角变化的趋势集合轨迹特征划分算法 |
| 基于航向角变化的趋势集合轨迹特征划分算法 |
|---|
| 输入: ←导航轨迹数据点 输出:轨迹特征点集合 BEGIN 1. while() 2. ; //初始化,将接收到导航轨迹数据的第一点存放入中 3. else 4. ,; //将接收到导航轨迹数据点存放入中 5. ,,; //计算该点的航向角变化,并给趋势状态赋值 6. while() 7. ,,,; //若趋势不明,则将和合并,用的趋势替换,并将清空 8. else 9. if() //若和趋势状态相同 10. ,,; //将和合并,并将清空 11. goto 14; //跳到步骤14,进行直线状态判断 12. else() //若和趋势状态不同 13. goto 14; 14. //计算航向角变化和,即该段时间内航向角的变化程度 15. if()//航向角变化大于给定直线状态阈值 16. goto 4; //返回步骤4,继续接收新的轨迹数据点进行判断 17. else 18. return ;//特征划分完毕,即为特征点集合 END |
Fig. 1 Overview of the proposed approach图1 技术路线框图 |
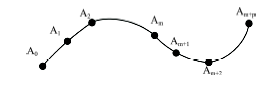
Fig. 2 The track feature图2 轨迹特征示意图 |
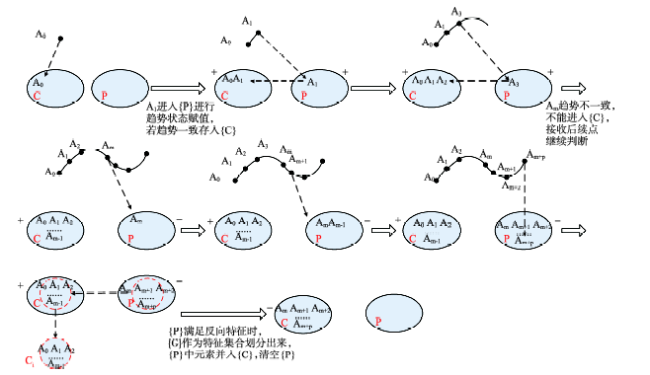
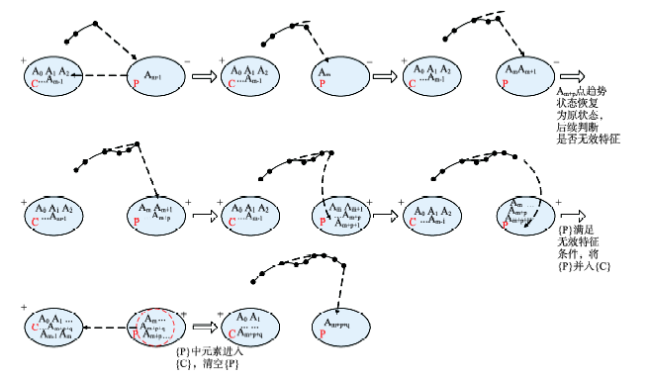
Fig. 3 Result of the extraction algorithm of track features based on trend set of heading angle variable图3 基于航向角变化的趋势集合轨迹特征划分算法示意图 |
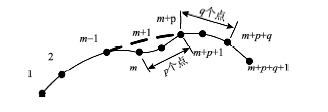
Fig. 4 The invalid track feature图4 无效特征示意图 |
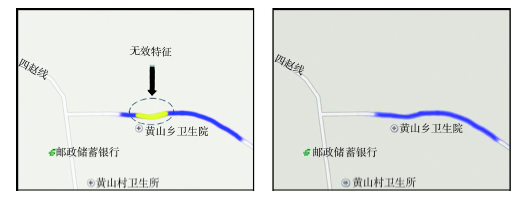
Fig. 5 The result of invalid track feature exaction图5 无效特征划分示意图 |
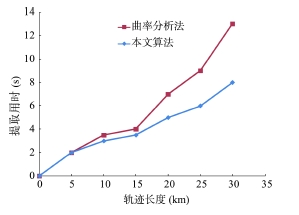
Fig. 6 The comparison of computation time between the proposed extraction algorithm and varisized curvature analysis in roads with different lengths图6 针对不同长度路线轨迹特征提取用时及与曲率分析算法的比较 |
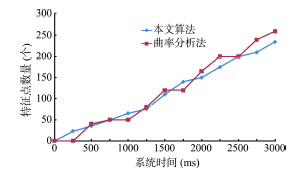
Fig. 7 The comparison of the extraction point quantity for the same route图7 针对同一路线2种算法的特征提取点数量的比较 |
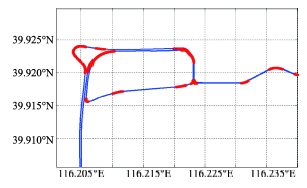
Fig. 8 The extraction algorithm of track features based on trend set of heading angle variable图8 基于航向角变化的趋势集合轨迹特征划分算法效果图 |
Tab. 2 Statistics of the test results for the extraction of track features based on the proposed algorithm表2 基于航向角变化的趋势集合轨迹特征划分实验统计表 |
| 路线 | 里程(km) | 总点数 | 特征总点数 | 有效特征点数 | 提取准确率(%) |
|---|---|---|---|---|---|
| 1 | 3 | 812 | 137 | 125 | 91.0 |
| 2 | 4 | 1474 | 255 | 235 | 92.3 |
| 3 | 2 | 371 | 68 | 62 | 91.2 |
| 4 | 3 | 560 | 89 | 81 | 91.0 |
| 总计 | 12 | 3217 | 549 | 454 | 91.6 |
Fig. 9 Quality of the extraction of the interference features图9 无效特征划分效果图 |
Tab. 3 Statistics of the test results for the extraction of track features based on varisized curvature analysis表3 基于曲率分析特征划分实验统计表 |
| 路线 | 里程(km) | 总点数 | 特征总点数 | 有效特征点数 | 提取准确率(%) |
|---|---|---|---|---|---|
| 1 | 3 | 812 | 137 | 112 | 81.8 |
| 2 | 4 | 1474 | 255 | 201 | 78.8 |
| 3 | 2 | 371 | 68 | 51 | 75.0 |
| 4 | 3 | 560 | 89 | 75 | 84.3 |
| 总计 | 12 | 3217 | 549 | 454 | 80.0 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}