
基于优化合并的高分辨率遥感影像分割算法
作者简介:苏腾飞(1987-),男,硕士,助理实验师,研究方向为面向地理对象影像分析的遥感数据处理算法的设计与实现。 E-mail: stf1987@126.com
收稿日期: 2015-04-01
要求修回日期: 2015-12-02
网络出版日期: 2016-07-15
基金资助
国家自然科学基金项目“科尔沁沙地典型生态系统水热通量传输机理及其与植被耦合关系试验和模拟研究”(51569017)
内蒙古自然科学基金项目“半干旱区沙地典型生态系统水热通量传输机理研究”(2015MS0514)
中国博士后科学基金面上资助“西部地区博士后人才资助计划”(2015M572630XB)
Segmentation Method Using Optimized Merging for High Resolution Remote Sensing Images
Received date: 2015-04-01
Request revised date: 2015-12-02
Online published: 2016-07-15
Copyright
高分辨率遥感影像的分割算法研究对遥感数据处理与应用具有重要意义。本文提出了一种优化合并的分割算法以提高运算效率,该算法包含局部最优合并和全局最优合并2个阶段。第1阶段采用凝聚层次聚类(Hierarchical Agglomerative Clustering,HAC)方法实现局部最优合并,并对其合并规则进行了优化,使优化后的合并规则先注重光谱特征,再考虑待合并区域的几何特征。第2阶段采用区域邻接图(Region Adjacency Graph,RAG)方法实现全局最优合并,其合并规则主要考虑了区域的光谱和边界信息,减少了区域尺度对合并规则函数产生的负面影响,并且该阶段利用了红黑树来实现全局最优合并,以提高对RAG的搜索效率。最后,利用OrbView3高分辨率遥感影像开展了分割实验,结果表明本文算法可以得到令人满意的分割精度。本文的成果为遥感影像分割及其相关研究提供了新思路。
苏腾飞 , 张圣微 , 李洪玉 . 基于优化合并的高分辨率遥感影像分割算法[J]. 地球信息科学学报, 2016 , 18(7) : 931 -940 . DOI: 10.3724/SP.J.1047.2016.00931
Study on the segmentation method for high resolution remote sensing images is very important for the processing and application of remote sensing data. Image segmentation plays an important role in geographic object-based image analysis, and it is also very useful in GIS data management and remote sensing data compression. A new segmentation algorithm using optimized merging criteria is proposed in this paper. The proposed algorithm divides the merging process into two stages, including the local best merging and the global best merging. Hierarchical agglomerative clustering is used to implement the first stage to meet the main objective of increasing the running efficiency. The merging criterion in the first stage focuses on the regional geometric information to create the visually pleasing segments, and in addition, this criterion is constructed on the premise that the regions to be merged should be sufficiently similar in spectra. Thus, when designing the merging criterion of the local best merge, the spectral and geometric information are both taken into consideration. Moreover, Global Moran′s I is used to determine the ending condition for the first stage. After the local best merging, the region adjacency graph (RAG) is constructed to implement the global best merging, in which the spectral and edge information is taken into account. In this stage, the negative impact introduced by the regions′ scale is found throughout the experiments. Thus, the size information of each region is excluded from the merging criterion of the global best merging. In addition, a special binary search tree, which is called the red-black tree, is used in the implementation to rank the edges of RAG, so as to speed up the graph structure updating after a merging taking place. High resolution images acquired from OrbView3 are adopted to conduct the segmentation experiment, the results of which indicate that our algorithm can produce the satisfactory performance. The conclusions made in this paper may provide new insights for the studies on remote sensing image segmentation and the related researches.
Fig.1 Algorithm flowchart图1 算法流程 |
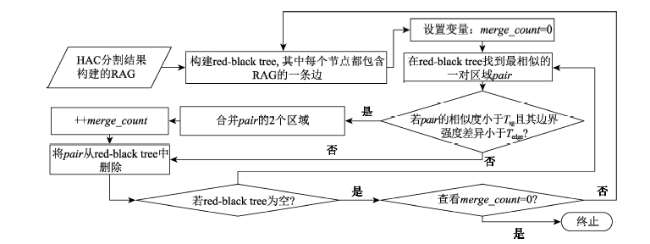
Fig.2 The flowchart of global best merge based on red-black tree图2 基于红黑树的全局最优合并算法流程图 |
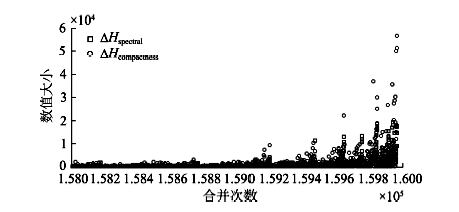
Fig.3 The variation of spectral and compactness heterogeneity with the increase of the merge number图3 光谱与紧凑异质性随合并次数增长的变化 |
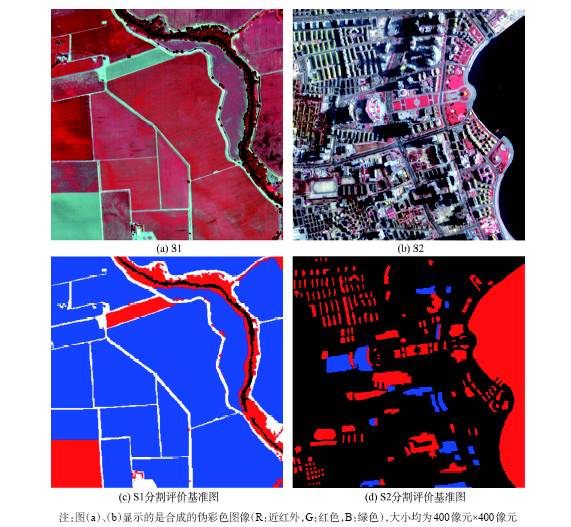
Fig.4 Two scenes of the OrbView3 multispectral images adopted by the experiment used in this paper图4 本文实验所采用的2景OrbView3多光谱影像 |
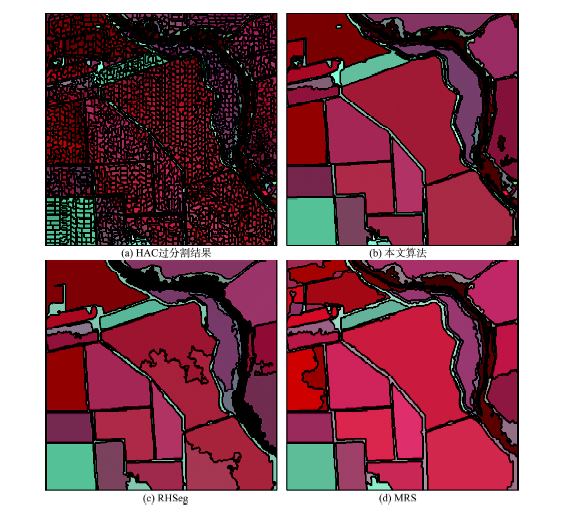
Fig.5 Segmentation results using the 3 algorithms for S1图5 3种算法的S1分割结果 |
Tab.1 Quantitative evaluation of the 3 algorithms for S1表1 3种算法的S1定量评价 |
| P | R | F | 时间/s | |
|---|---|---|---|---|
| 本文方法 | 0.9512 | 0.8624 | 0.8788 | 0.52 |
| RHSeg | 0.8540 | 0.7979 | 0.8085 | 0.66 |
| MRS | 0.9319 | 0.7450 | 0.7761 | 0.82 |
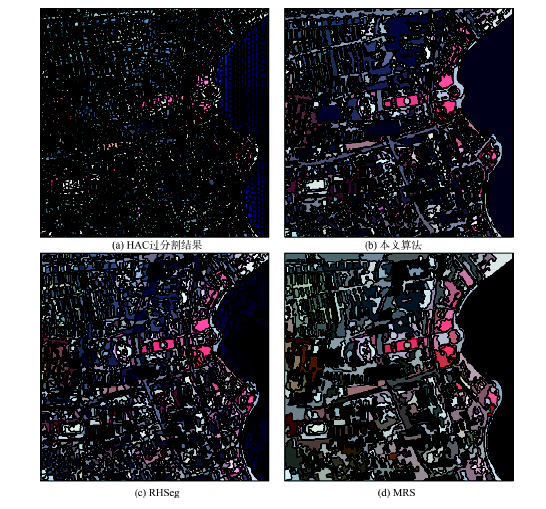
3.3.2 城市地区影像的分割实验 |
Tab.2 Quantitative evaluation of the 3 algorithms for S2表2 3种算法的S2定量评价 |
| P | R | F | 时间/s | |
|---|---|---|---|---|
| 本文方法 | 0.8037 | 0.8758 | 0.8603 | 0.44 |
| RHSeg | 0.8674 | 0.7035 | 0.7311 | 0.96 |
| MRS | 0.2498 | 0.9183 | 0.5981 | 0.80 |
Fig.6 Segmentation results using the 3 algorithms for S2图6 3种算法的S2分割结果 |
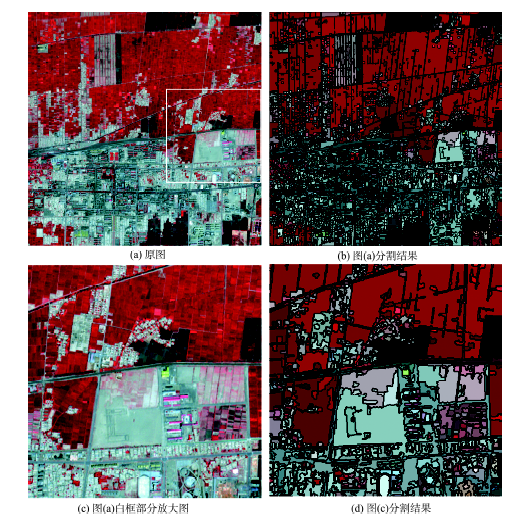
Fig.7 The segmentation of a scene with relatively good representativeness图7 一景较有代表性的遥感影像的分割结果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
[
|
| [16] |
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
Trimble. eCognition developer 8 reference book[EB/OL]. .
|
| [27] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}