
基于结构化场景的单幅图像建筑物三维重建
作者简介:王思洁(1990-),女,硕士生,研究方向虚拟地理环境与数字区域模型。E-mail:wangsijie163@163.com
收稿日期: 2015-09-08
要求修回日期: 2015-11-12
网络出版日期: 2016-08-10
基金资助
国家科技支撑计划课题(2013BAH28F02)
国家自然科学基金项目(41471334、 31200430)
A Single View Type 3D Reconstructive Method for Architecture Based on Structured Scene
Received date: 2015-09-08
Request revised date: 2015-11-12
Online published: 2016-08-10
Copyright
针对无法利用激光扫描或多张图像实现三维重建的已损或不复存在的建筑,本文提出了一种基于结构化场景的单张图像建筑物三维重建方法。该方法先基于RANSAC算法及最小距离法分别解算灭点直线和灭点;然后基于平行平面、包含平行信息的任意平面和包含垂直信息的任意平面的平面模型解算三维坐标。本文以现存某高校图书馆为例,重建了三维模型,并分析了模型精度。结果表明,重建误差最小为0,最大为5.8%,模型整体精度在1.9%左右,符合三维重建精度要求。在四川省白鹿领报修院教堂的三维重建应用中,建立了已损建筑物的三维模型,获得了较好的重建效果。该方法适用于包含平行、垂直、灭点和平面结构的建筑物场景,可得到建筑物三维几何线框模型,几何细节采用纹理映射替代,可应用于现存建筑和文化遗存遗址的三维重建。
王思洁 , 方莉娜 , 陈崇成 , 黄明伟 . 基于结构化场景的单幅图像建筑物三维重建[J]. 地球信息科学学报, 2016 , 18(8) : 1022 -1029 . DOI: 10.3724/SP.J.1047.2016.01022
For the damaged or disappeared buildings which cannot be reconstructed by laser scanning technique or from multi-pictures, this paper proposed a method for the single view architecture's reconstruction based on the structured scene. Firstly, the vanishing lines and vanishing points were calculated and extracted based on the RANSAC algorithm and minimum distance method. Then, their three dimensional coordinates were calculated from the parallel plane or any plane that contains the parallel lines or vertical lines. Experiments were undertaken to evaluate the validities of the proposed method with two datasets, one of which is featured by a university's library and the other is the Sichuan Bailu Lingbao Seminary Church. The minimum reconstruction error of the university library is 0 while the maximum is 5.8%, and the overall accuracy is about 1.9%, which satisfies the accuracy requirement. At the same time, this method was applied for reconstructing the damaged buildings, which provides a good reconstruction result for Sichuan Lingbao Seminary Church's three dimensional reconstruction and modeling. This method is applicable to building scenarios containing the parallel, perpendicular, vanishing point and plane structure, which is used to obtain the three-dimensional geometric wireframe building model. Furthermore, the geometric details are replaced by texture mapping. This method also can be applied to the three-dimensional reconstruction of the existing buildings and ancient cultural relics.
Key words: single view; 3D reconstruction; plane reconstruction; architecture
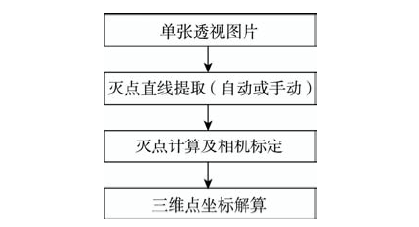
Fig.1 The flow diagram based on the structured scene for a single view building's 3D reconstruction图1 基于结构化场景的单幅图像建筑物三维重建流程图 |
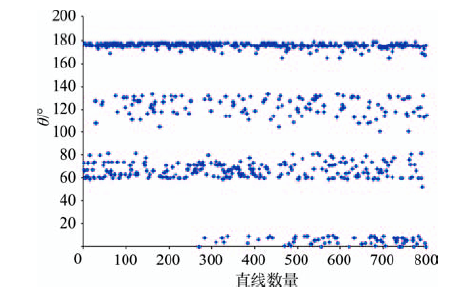
Fig.2 The distribution of different line angles图2 直线角度分布 |
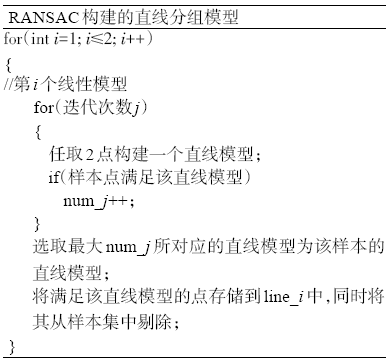
Fig.3 The result of line grouping图3 直线分组结果 |
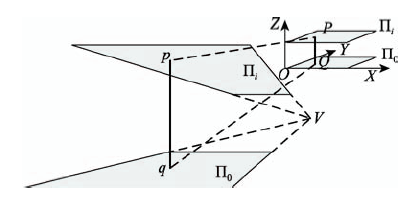
Fig.4 The diagram of parallel plane reconstruction图4 平行平面重建示意图 |
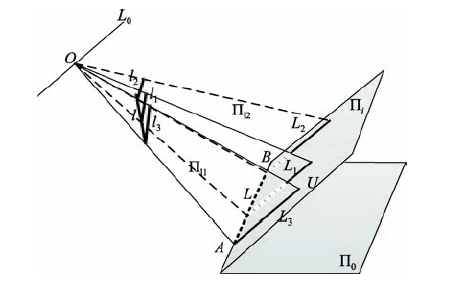
Fig.5 The diagram of any plane reconstruction图5 任意平面重建示意图 |
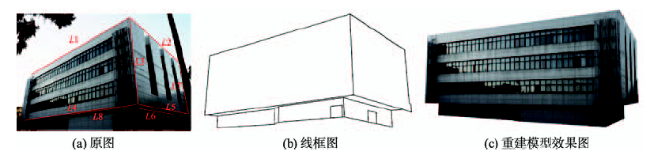
Fig.7 The result of the reconstructed library图7 图书馆建筑重建结果 |
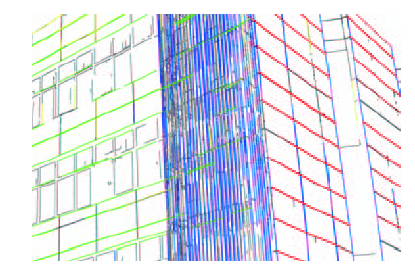
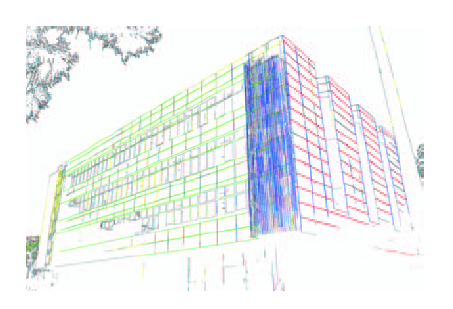
Fig.6 The line grouping result of the library图6 图书馆直线分组结果 |
Tab.1 The result and SD of the automatic method for computing vanishing points表1 自动法灭点计算结果与标准差 |
| VX/像元 | VY/像元 | VZ/像元 | |
|---|---|---|---|
| x | 5695.02 | -2008.18 | 1974.29 |
| y | 2777.26 | 2913.39 | -8404.50 |
| SD | 0.63 | 1.74 | 12.97 |
Tab.2 The result and SD of the manual method for computing vanishing points表2 手动法灭点计算结果与标准差 |
| VX/像元 | VY/像元 | VZ/像元 | |
|---|---|---|---|
| x | 5665.14 | -1999.87 | 1942.98 |
| y | 2761.56 | 2903.03 | -8666.43 |
| SD | 1.46 | 3.67 | 8.73 |
Tab.3 The computing result and error of the camera focal length表3 相机焦距计算结果与误差 |
| 真实值 | 计算值 | 误差 | |
|---|---|---|---|
| 自动法 | 20.00 | 19.94 | 0.0029 |
| 手动法 | 20.00 | 19.91 | 0.0047 |
Tab.4 The camera calibration result for experiment one表4 实验一相机标定结果 |
| 内参数/像元 | 外参数矩阵 | 投影矩阵P | ||
|---|---|---|---|---|
| u0 | 2152.94 | |||
| v0 | 1512.12 | |||
| f | 3608.83 | |||
Tab.5 The accuracy evaluation of model表5 模型精度评价 |
| 线段 | 模型长度/m | 实际长度/m | 绝对误差 |
|---|---|---|---|
| L1 | 38.759 | 38.707 | 0.001 |
| L2 | 23.920 | 24.428 | 0.021 |
| L3 | 13.937 | 14.212 | 0.019 |
| L4 | 38.951 | 38.951 | 0.000 |
| L5 | 24.764 | 25.450 | 0.027 |
| L6 | 11.956 | 12.399 | 0.036 |
| L7 | 14.859 | 14.038 | 0.058 |
| L8 | 15.040 | 15.379 | 0.001 |
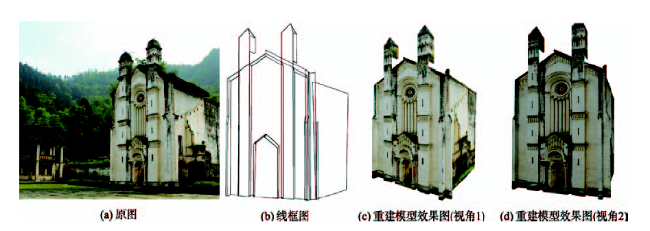
Fig.8 The result of the reconstructed Bailu Lingbao Seminary Church图8 白鹿领报修院教堂建筑重建结果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
|
| [22] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}