
基于人工神经网络的多特征因子路网匹配算法
作者简介:郭宁宁(1989-),男,硕士生,研究方向为数据集成与地图更新。E-mail: gnn0707@163.com
收稿日期: 2015-12-28
要求修回日期: 2016-03-07
网络出版日期: 2016-09-27
基金资助
国家自然科学基金项目(41271383、41471102)江苏省自然科学基金项目(BK20151547)
Road Network Matching Considering Multiple Geometric Characteristics Based on the Artificial Neural Network
Received date: 2015-12-28
Request revised date: 2016-03-07
Online published: 2016-09-27
Copyright
在综合考虑多个特征因子的线要素匹配时,根据经验知识确定各特征因子的权值会造成人为误差。针对该问题,本文提出了基于人工神经网络的多特征因子路网匹配算法,根据线要素的几何和拓扑特性选取长度、方向、形状、距离及拓扑5个特征因子的相似度作为路网匹配参考因子。首先,分别在参考图层和待匹配图层中选取样本数据组成样本对,计算样本数据的5个特征因子相似度,用样本数据的5个特征因子相似度和样本的匹配度组成学习模式对;然后,利用BP神经网络的误差反向传播机制自动学习调整各神经层之间的连接权值;最后,输入全部数据,计算参考图层的弧段和待匹配图层的弧段间的匹配度,实现综合多特征因子的路网匹配。实验结果表明,利用人工神经网络进行综合多特征因子的路网匹配可以提高匹配效率和匹配准确度。
郭宁宁 , 盛业华 , 黄宝群 , 吕海洋 , 张思阳 . 基于人工神经网络的多特征因子路网匹配算法[J]. 地球信息科学学报, 2016 , 18(9) : 1153 -1159 . DOI: 10.3724/SP.J.1047.2016.01153
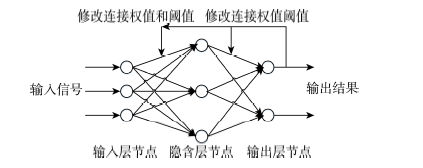
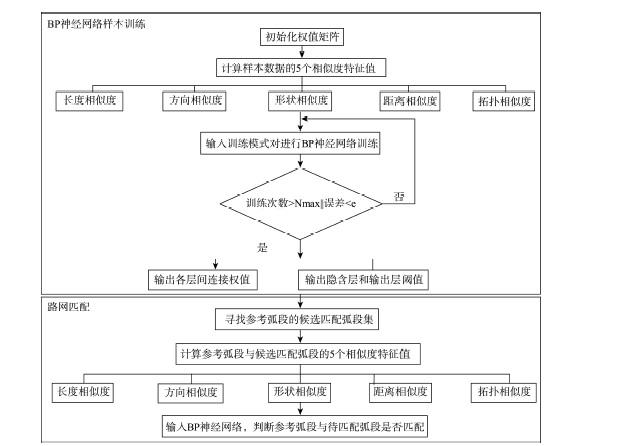
The matching of line features is the premise and key technology of map conflation, which also plays an important role in change detection, digital map updating and map registration. To improve the accuracy of line feature matching, multiple geometrical characteristics and topological characteristics should be considered, such as distance, length, shape, orientation, node-degree and so on. It may produce errors when the weights of the characteristic factors are determined merely by experience. Therefore, to avoid this problem, a road network matching method considering multiple geometric characteristics based on the artificial neural network is proposed. Length similarity, orientation similarity, shape similarity, distance similarity and topological similarity (which is the node-degree similarity) are the five feature similarities discussed in this paper. They are the neurons of the input layer in BP (Back Propagation) neural network. To implement this method, first of all, samples of the reference layer and the adjustment layer are selected and the values of the five similarities for these samples are calculated. Secondly, the five feature similarities of these samples incorporating the matching rate are serving as the learning modes and are used to train the BP neural network. And the connection weights between the neural network and the threshold values of neurons are adjusted automatically. Next, buffers of the reference layer's arcs are generated. Arcs within the adjustment layer's buffers are defined as the candidate arcs. At last, the five feature similarities between each arc within the reference layer and its candidate arcs are calculated. Then, these similarities are put into the BP neural network to compute the matching rates of these arcs. If the matching rate is greater than 0.8, the relevant two arcs are regarded as an accurate matching; if the matching rate is less than 0.5, the relevant two arcs are considered to be bad matching; otherwise, they are considered to be less accurate matching which needs the interference of manual assistance to determine whether the two arcs match or not. Result shows that the adoption of BP neural network makes the road networks matching more efficient and accurate, and it avoids the assignment of proper weights to different geometrical characteristics at the same time.
Fig.1 Illustration of node degree图1 结点的结点度示意图 |
Fig.2 Structure of BP neural network图2 BP神经网络结构图 |
Fig.3 The flowchart of road network matching based on BP neural network图3 BP神经网络路网匹配实验流程 |
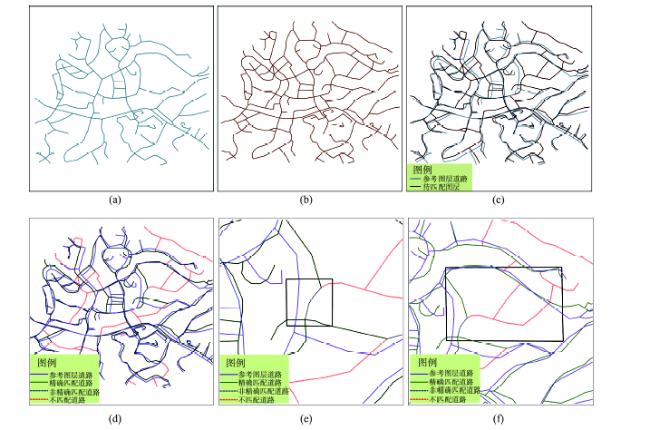
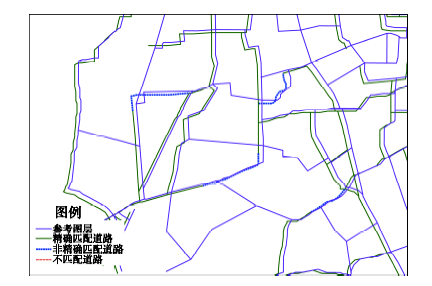
Fig.4 Matching result of two road networks within the same region图4 同一区域道路网数据及路网匹配结果图 |
Tab.1 The detailed information of some uncertain matching segments that requiring the artificial interpretation表1 需人工判读的路段匹配信息 |
| 待匹配弧段 | 参考弧段 | 长度相似度 | 方向相似度 | 形状相似度 | 距离相似度 | 拓扑相似度 | 匹配度 |
|---|---|---|---|---|---|---|---|
| A129 | B109 | 0.33 | 0.63 | 0.29 | 0.78 | 1.00 | 0.59 |
| A207 | B139 | 0.70 | 0.91 | 0.61 | 0.35 | 0.75 | 0.73 |
| A123 | B80 | 0.87 | 0.90 | 0.56 | 0.26 | 1.00 | 0.76 |
| A79 | B49 | 0.42 | 0.98 | 0.41 | 0.26 | 1.00 | 0.71 |
Tab.2 Matching result of two tests of road networks表2 道路网匹配结果 |
| 实验组 | 数据总量 | 精确匹配 | 比例/(%) | 非精确匹配 | 比例/(%) | 不匹配 | 比例/(%) | 漏匹配 | 误匹配 | 比例/(%) | 准确率/(%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 实验1 | 207 | 168 | 80.77 | 6 | 2.88 | 34 | 16.15 | 0 | 2 | 0.96 | 99.04 |
| 实验2 | 332 | 315 | 94.88 | 16 | 4.82 | 1 | 0.30 | 0 | 6 | 1.81 | 98.19 |
Fig.5 Matching result of road network matching in test 2图5 实验二路网匹配结果图 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
Goodchild M F. Conflation: combining geographical information[EB/OL]. .
|
| [5] |
Kang H. Spatial data integration: a case study of map conflation with census bureau and local government data[EB/OL]. .
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
|
| [10] |
[
|
| [11] |
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
|
| [18] |
|
| [19] |
[
|
| [20] |
[
|
| [21] |
|
| [22] |
[
|
| [23] |
[
|
| [24] |
[
|
| [25] |
[
|
| [26] |
|
| [27] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}