
顾及地表汇水分析的城市DEM构建
作者简介:王 峥(1989-),女,北京人,硕士生,主要从事遥感和地理信息系统应用研究。E-mail:wz_eternal@163.com
收稿日期: 2016-07-08
要求修回日期: 2016-10-27
网络出版日期: 2016-12-20
基金资助
城市典型区域不均匀沉降信息获取与机理研究(2012CB723403)
Urban DEM Construction for Analysis of Surface Water Catchment
Received date: 2016-07-08
Request revised date: 2016-10-27
Online published: 2016-12-20
Copyright
城市暴雨内涝是城市最普遍的自然灾害之一。受城市复杂下垫面环境的影响,城市暴雨积水具有响应时间短、淹没速度快的特点。数字高程模型(Digital Elevation Model, DEM)是城市地表汇水分析的关键,是暴雨积水分析的基础,而传统方法构建的DEM不能满足复杂下垫面环境下城市暴雨积水淹没分析的需求。本文以构建顾及地表汇水分析的城市DEM为目的,提出基于多源数据融合思想和地形修正思想的DEM构建方法,即将数字摄影测量技术构建的大范围DEM与车载激光扫描技术构建的城市道路高精度DEM相融合,再利用影响雨水汇流路径的建筑物、水系等要素对DEM进行修正的构建方法。本文以北京市海淀区公主坟地区为例进行研究,结果表明该方法构建的DEM在道路区域高程精度可达厘米级,实现了对城市道路易积水区域的重点表达,基于该DEM的汇水分析结果基本符合城市下垫面汇水特点,因此,本文构建的DEM适用于城市道路、桥区汇水路径分析和积水淹没分析。
王峥 , 孙永华 , 李小娟 . 顾及地表汇水分析的城市DEM构建[J]. 地球信息科学学报, 2016 , 18(12) : 1608 -1614 . DOI: 10.3724/SP.J.1047.2016.01608
:Urban rainstorm waterlogging is one of the urban' s most common natural disaster. Since the environment of urban underlying surface is complex, urban rainstorm waterlogging has a short response time and submerged speed characteristics. Digital Elevation Model (DEM) is the key of urban surface water catchment, and it is also the basis of rainstorm waterlogging inundation analysis, but the DEM building by traditional methods cannot meet the needs of urban flood analysis under complex underlying surface environment. This paper based on the thinking of multi-source data fusion terrain correction, aiming at constructing the urban DEM for the surface water catchment analysis. This paper used multi-source data fusion approach to incorporate DEM obtained by digital photogrammetry method and technology, then, modified the fused DEM using building、water system elements which change the route of urban runoff. This paper selected the Gongzhufen area in Haidian District, Beijing, to verify the feasibility of this method, the result showed that the urban DEM with a relatively high accuracy, especially in the urban road area where the accuracy was at the centimeter level. The DEM realized the key expression of urban road area which is easy to accumulate water, moreover, the water network and catchment area extraction results based on it were more accurate. The DEM built by this method was suitable for urban rainstorm waterlogging analysis.
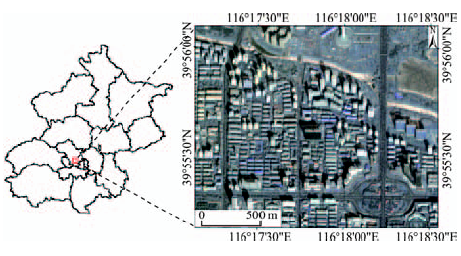
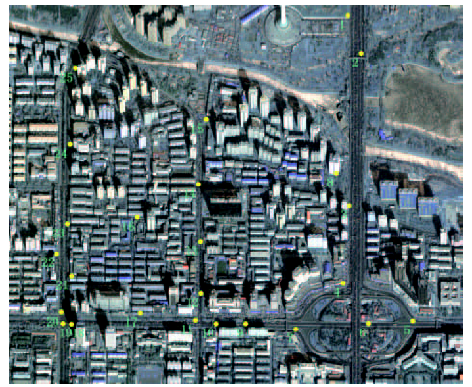
Fig. 1 Position and remote sensing image of study area图1 研究区位置及遥感影像图 |
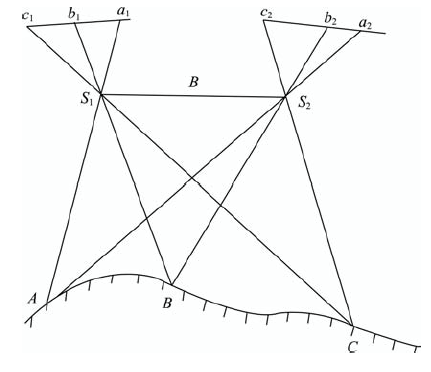
Fig. 2 The principle diagram of constructionDEM using stereo pair图2 立体像对获取DEM原理图 |
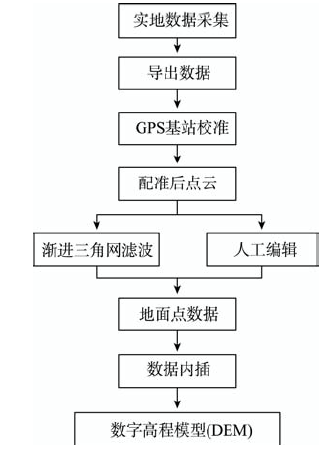
Fig. 3 The data flow diagram of generatingDEM by vehicle-borne laser图3 车载激光扫描技术获取DEM的流程图 |
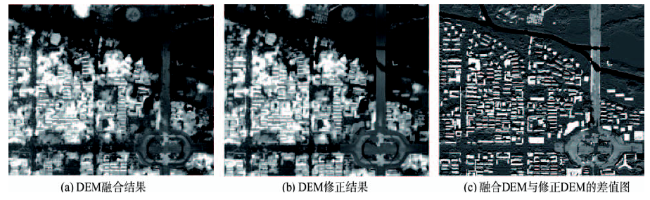
Fig. 4 Experimental result图4 实验结果 |
Fig. 5 The position of checkpoints图5 检查点位置分布图 |
Tab. 1 DEM elevation error statistics (m)表1 DEM高程误差统计(m) |
| 检查点位置 | 检查点个数 | 误差均值 | 均方差 |
|---|---|---|---|
| 道路 | 7 | 0.15 | 0.11 |
| 其他区域 | 18 | 1.7 | 1.2 |
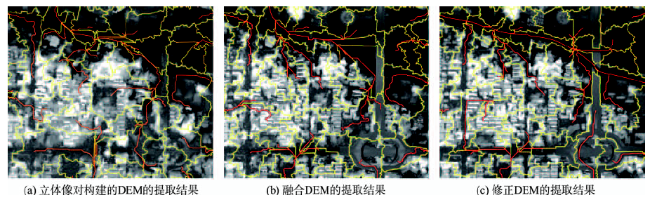
Fig. 6 The extraction results of water network (red line) and catchment (yellow line)图6 汇水网络(红线)与汇水区提取(黄线)结果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
|
| [21] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}