
时空轨迹分类研究进展
作者简介:赵竹珺(1993- ),女,硕士生,研究方向为数据挖掘及其应用。E-mail:493932879@qq.com
收稿日期: 2016-08-09
要求修回日期: 2016-12-05
网络出版日期: 2017-03-20
基金资助
国家自然科学基金项目“云计算环境下顾及用户关系的手机用户时空轨迹模式挖掘方法研究”(41471371)
Research Progress of Spatial-temporal Trajectory Classification
Received date: 2016-08-09
Request revised date: 2016-12-05
Online published: 2017-03-20
Copyright
赵竹珺 , 吉根林 . 时空轨迹分类研究进展[J]. 地球信息科学学报, 2017 , 19(3) : 289 -297 . DOI: 10.3724/SP.J.1047.2017.00289
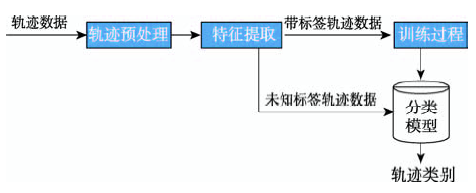
Spatial-temporal trajectory classification aims at predicting the category of a spatial-temporal trajectory. The classification of spatial-temporal trajectories plays an important role in urban planning, personalized user recommendation and so on. The process of trajectory classification includes three stages: trajectory preprocessing, feature extraction and classification. This paper reviews the recent research progress on trajectory classification. Firstly, we introduce the process of trajectory classification. Then, the trajectory classification algorithms are classified into three categories according to the method of feature extraction, including the trajectory classification algorithm based on motion feature, the trajectory classification algorithm based on classification rule and the trajectory classification algorithm based on image signal analysis. We also discuss the basic ideas, advantages and disadvantages of these algorithms. Thirdly, we compare the existing classification algorithms according to the sensors, feature extraction and classifiers used in these algorithms. Finally, we introduce the challenges of the existing trajectory classification algorithms.
Fig. 1 The process of trajectory classification图1 轨迹分类过程图 |
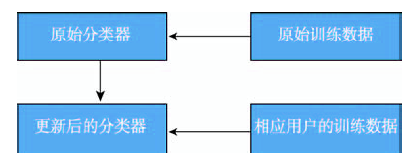
Fig. 5 The classification model图5 分类模型 |
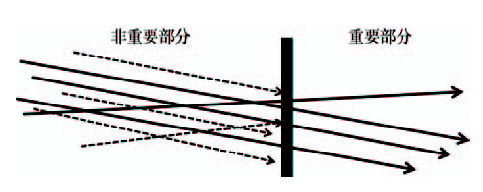
Fig. 6 Trajectory segmentation for critical segments图6 重要轨迹分段 |
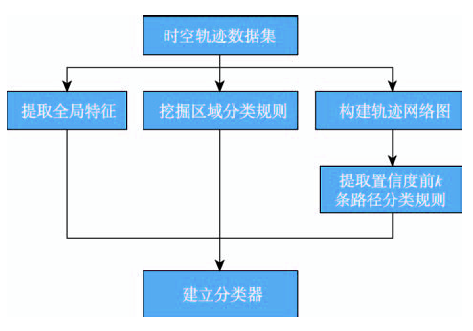
Fig. 8 The flow diagram of Patel D algorithm图8 Patel D算法流程图 |
Tab. 1 Comparison of classification algorithms of different trajectories表1 各轨迹分类算法比较 |
| 算法类别 | 轨迹采集方式 | 分类器 | 轨迹特征 | 作者 | 优缺点 |
|---|---|---|---|---|---|
| 运动特征 | GPS | 专家系统 | 最大速度的95%,平均速度,平均移动速度,段出现的位置是否有基础设施且接近程度值 | Biljecki F[1] | 该类方法结合轨迹的特点以及统计学知识,提取具有较强识别能力的运动特征,但没有考虑到轨迹出现的地点以及具体时间信息 |
| GPS | 决策树、支持向量机、贝叶斯网络、条件随机域 | 角度变化率 (HCR),停留次数比例 (SR)与速度变化率 (VCR) | Zheng Y[3, 18] | ||
| GPS | 无监督学习 | 最大速度分布情况 | Lin M[17] | ||
| GPS | 决策树+隐马尔可夫 | 单条轨迹特征,前后段轨迹类别转换特征,地理数据特征 | Zhu Y[6] | ||
| GPS、加速度计数据、陀螺仪数据 | k近邻、支持向量机、决策树、Bagging与随机森林 | 加速度、速度、谱熵等165个特征值 | Jahangiri A[19] | ||
| GPS | 支持向量机 | 运动轨迹的全局特征与局部特征 | 朱进[23] | ||
| GPS | 支持向量机 | 加速度、减速度、加速度和减速度标准偏差 | Sun Z[32] | ||
| 加速度计、 陀螺仪 | 支持向量机、神经网络、决策树、Boosted Decision Tree、随机森林与朴素贝叶斯 | 两传感器数据标准差、偏度和峰度 | Shafique M A[20] | ||
| GPS | 神经网络 | 平均速度、停留时间、关键点信息等 | Gonzalez P A[11] | ||
| GPS | 高斯混合模型 | 速度信息 | Zhu W[15] | ||
| GPS,加速度计 | 决策树+隐马尔可夫模式 | 均值,方差等 | Reddy S[21] | ||
| GPS、真实交通数据 | 贝叶斯、决策树、随机森林 | 速度信息、平均车辆亲密度、平均铁路亲密度、平均候选车辆亲密度 | Stenneth L[33] | ||
| GPS | 支持向量机 | 速度、加速度 | Bolbol A[22] | ||
| gms、wifi | 决策树 | 基站信息、信号强度、接入wifi的持续时间等 | Mun M[34] | ||
| 分类规则 | GPS、呼叫详细记录 | 支持向量机 | 起点位置、终点位置、从起点到终点的运动时间 | Wang H[14] | 该类方法充分利用训练数据,挖掘具有较强识别能力的分类规则,考虑到轨迹的时间以及地点信息,但仅适用于训练数据足够充分,便于挖掘规律的情况 |
| GPS | 支持向量机 | 区域分类规则、路径分类规则 | Brinkhoff T[28]、Lee J G[4]、 Patel D[5] | ||
| 图像信号 | 加速度计 | Adaboost+隐马尔可夫 | 基于帧的特征、基于峰值的特征(加速度)、基于段的特征值 | Hemminki S[35] | 该类方法更加注重轨迹形状对轨迹分类结果的影响,但轨迹转化为图像或信号时,并不能将时间信息考虑进去 |
| GPS | 支持向量机 | 墨西哥帽小波、回归系数等5种特征的平均值与标准差 | Macdonald A[30] | ||
| GPS | 逻辑回归、支持向量机、决策树 | 转化为图像,使用神经网络自动生成特征 | Endo Y[31] |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}