
无人机遥感数据处理与滑坡信息提取
作者简介:陈天博(1990-),男,硕士生,主要从事无人机遥感影像处理与信息提取研究。E-mail:chen.tianbo@163.com
收稿日期: 2016-01-21
要求修回日期: 2016-06-23
网络出版日期: 2017-05-20
基金资助
国家科技支撑计划项目(2013BAC03B04)
国家自然科学基金项目(41301468)
Data Processing and Landslide Information Extraction Based on UAV Remote Sensing
Received date: 2016-01-21
Request revised date: 2016-06-23
Online published: 2017-05-20
Copyright
高分辨率的DEM和DOM数据是对地形地貌信息的准确描述,也是滑坡信息提取的重要数据源。首先,针对滑坡信息提取的要求,本文采用无人搭载微型单反相机的影像获取平台,结合野外测量的GPS数据,弥补了无人机POS信息精度低的劣势;针对无人机影像的特点,运用摄影测量基本原理与计算机视觉算法,获取高精度、高分辨率的DEM与DOM影像,保留了丰富的光谱与纹理信息。其次,借助ESP辅助工具获取了DOM影像的最佳分割尺度,并结合研究区地物特征构建了基于模糊分类与SVM算法相结合的决策树,运用面向对象的分类方法实现了对研究区内植被、道路、疑似滑坡区域的信息提取。最后,依照研究区地物分布的空间特征确定了高风险等级区域,并对该区域进行滑坡的形态与纹理分析以及精度评价,其中提取的疑似滑坡区域用户精度为91.44%、生产者精度为84.65%,结果表明无人机遥感在滑坡信息提取领域具有较高的应用价值。
陈天博 , 胡卓玮 , 魏铼 , 胡顺强 . 无人机遥感数据处理与滑坡信息提取[J]. 地球信息科学学报, 2017 , 19(5) : 692 -701 . DOI: 10.3724/SP.J.1047.2017.00692
The high-resolution DEM and DOM data is an accurate description of the topography and geomorphology, and it is also an important source data for landslide information extraction. At first,according to the requirement of landslide information extraction,we use the UAV platform equipped with mini SLR camera combined with the GPS data measured in the field, as the image acquisition method. According to the characteristics of the UAV images, we use the basic principle of photography measurement and computer vision algorithms to obtain the high-resolution DEM and DOM images, which greatly preserves the rich spectral and texture information. Then, with the help of the ESP auxiliary tool we get optimal segmentation scale of the DOM. Based on the fuzzy classification and SVM algorithm to construct a decision tree, which we used to achieve the object oriented classification and information extraction. Finally, according to the spatial feature and distribution of study area we determine the high risk area. By the morphology and texture analysis and accuracy assessment of the landslide area, we show that the producer’s accuracy and user's accuracy of the landslide area are 84.65% , 91.44%. The result proves that the UAV remote sensing has a high value in the field of landslide information extraction.
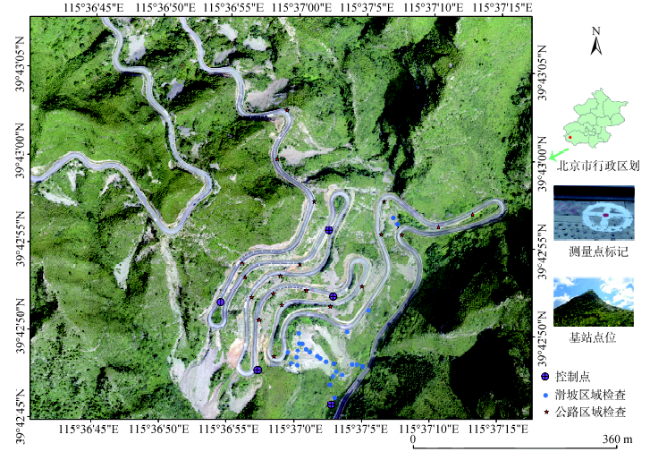
Fig. 1 Distribution of the control points and check points in the study area图1 研究区概况及控制点和检查点的分布 |
Tab. 1 The detail parameters of the UAV flight routes表1 无人机飞行航线详细参数 |
| 航线1 | 航线2a | 航线2b | |
|---|---|---|---|
| 拍摄方式 | 垂直拍摄 | 垂直拍摄 | 倾斜拍摄 |
| 航线全长/km | 9.4 | 2.6 | 3.1 |
| 飞行绝对高度/m | 950 | 720 | 700 |
| 航向重叠率/% | 80 | 90 | 90 |
| 旁向重叠率/% | 65 | 70 | 7 |
| 相机芯片尺寸/mm | 23.5×15.6 | 23.5×15.6 | 23.5×15.6 |
| 相片分辨率 | 6000×4000 | 6000×4000 | 6000×4000 |
| 飞行区海拔范围/m | 389~808 | 417~650 | 417~650 |
| 最低点地面分辨率/m | 0.14 | 0.07 | 0.08 |
| 照片数/张 | 238 | 72 | 70 |
| 相机俯仰角/° | 90 | 90 | 35 |
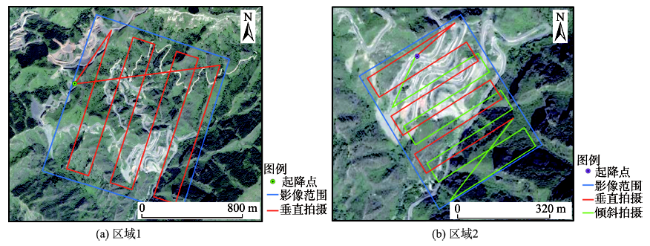
Fig. 2 The flight routes and the range of images图2 飞行航线与影像范围 |
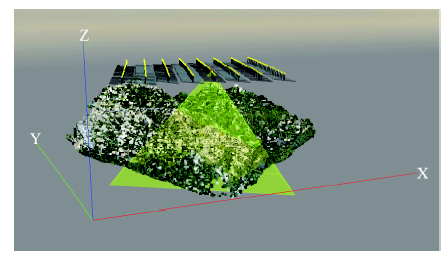
Fig. 3 The spatial location and coverage of the photos图3 相片的空间位置与覆盖范围 |
Tab. 2 The result of aero-triangulation and bundle adjustment表2 空中三角测量及光书法平差结果 |
| 空中三角测量 | 光束法平差 | ||||||
|---|---|---|---|---|---|---|---|
| 覆盖面积/km2 | GSD/cm | 每张照片特征点/个 | 每张照片匹配点/个 | 平面点/个 | 平高点/个 | 反投影误差(像元) | |
| 区域1 | 1.32 | 8.6 | 109 411 | 21 133 | 8 657 698 | 3 399 563 | 0.24 |
| 区域2 | 0.28 | 5.4 | 118 108 | 34 010 | 2 187 265 | 879 857 | 0.17 |
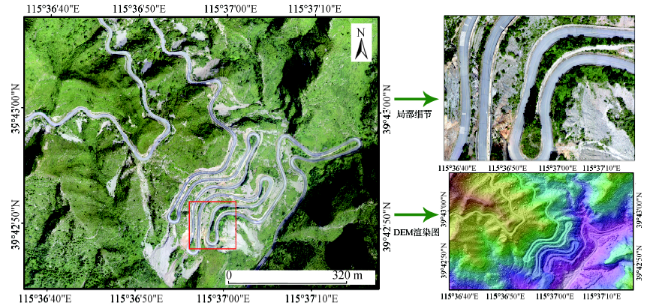
Fig. 4 The DEM and DOM of the study area图4 研究区DOM与DEM影像 |
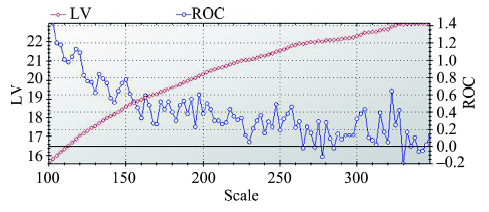
Fig. 5 The calculation results of ESP tool图5 ESP工具计算结果 |
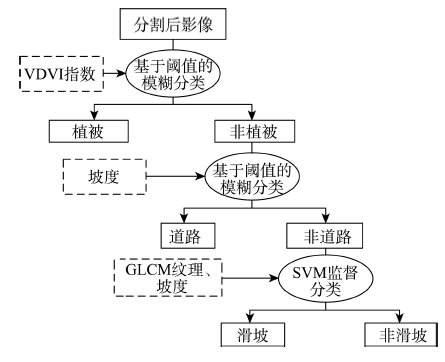
Fig. 6 The classification decision tree图6 分类决策树 |
Tab. 3 The classification rule表3 分类规则 |
| 类别 | 参考特征 | 隶属度函数 | 阈值 |
|---|---|---|---|
| 植被 | VDVI指数 |  | (-0.018, 0.002) |
| 道路 | 坡度 |  | (14, 16) |
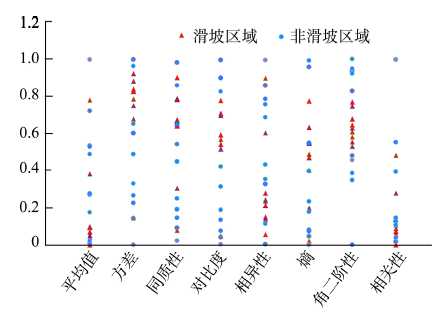
Fig. 7 GLCM texture feature statistics of sample points图7 样本点的GLCM纹理特征统计 |
Tab. 4 The feature of GLCM texture表4 GLCM纹理特征 |
| 纹理特征 | |
|---|---|
| 方差 | 当区域内的灰度变化较大时,该值较高 |
| 对比度 | 表示领域内的灰度差异,影像局部变化越大,值越大 |
| 角二阶矩 | 为同质性的度量,区域内像元值越相近,其同质性越高,该值也越大 |
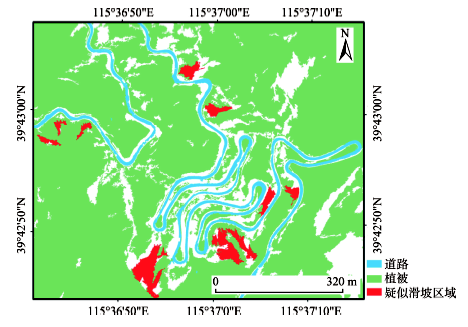
Fig. 8 The result of the study area information图8 研究区信息提取结果 |
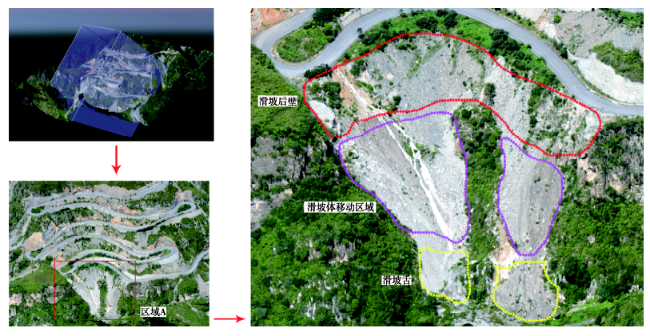
Fig. 9 The projected image and morphological analysis of the key landslide area图9 重点滑坡区域的投影影像以及滑坡形态分析 |
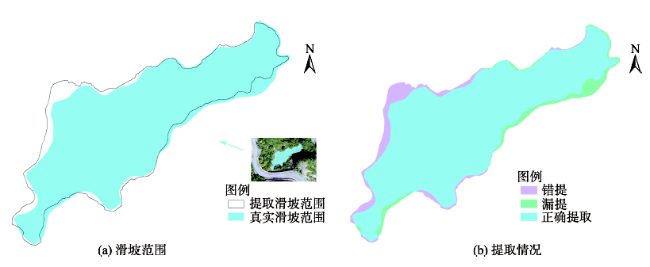
Fig. 10 The schematic diagram of the accuracy evaluation method图10 精度评价方法示意图 |
Tab. 5 The accuracy evaluation of classification results表5 分类结果精度评价 |
| 地物 类型 | 参考分类 结果/m2 | 实际分类 结果/m2 | 正确分类 区域/m2 | 生产者 精度/% | 用户精度/% |
|---|---|---|---|---|---|
| 道路 | 35 190.39 | 31 882.42 | 29 466.97 | 83.74 | 92.42 |
| 植被 | 763 596.05 | 654 317.23 | 605 215.03 | 79.26 | 92.50 |
| 疑似滑坡区域 | 18 331.57 | 16 971.47 | 15 518.28 | 84.65 | 91.44 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
[
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
[
|
| [22] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}