
车载激光扫描数据路坎点云提取方法
作者简介:罗海峰(1990- ),男,硕士生,研究方向为园林与生态景观设计规划技术。E-mail:dudulhf@163.com
收稿日期: 2016-08-22
要求修回日期: 2016-12-27
网络出版日期: 2017-07-10
基金资助
国家自然科学基金青年科学基金项目(41501493)
福建省科技计划重点项目(2015H0015)
福建省教育厅中青年教师科研项目(JAT160078)
中国博士后面上科学基金项目
Curb Point Clouds Extraction from Vehicle-Borne Laser Scanning Data
Received date: 2016-08-22
Request revised date: 2016-12-27
Online published: 2017-07-10
Copyright
车载激光扫描系统能够快速准确地获取街道环境的点云数据,但由于扫描点云的点密度高、数据量大、空间分布不均匀、地物相互遮挡及城市街道环境复杂等特点,难以直接从原始点云数据中提取出路坎点云。本文首先通过分析路坎点云的空间分布特征和局部几何特征,构建包含相对高程、法向量方向、多尺度高程差及多尺度高程方差的点云特征向量;然后,采用SVM提取城市街道环境车载激光扫描数据中的路坎点云,并对提取结果进行聚类去噪,优化路坎点云。最后,通过Street Mapper 360系统和Lynx Mobile Mapper V100 系统采集的4份不同城市街道环境车载激光扫描数据对本文方法进行验证,其中路坎点云提取结果的完整度均超过了94.99%、准确度均超过91.88%、精度亦均达到了90.55%以上。实验结果表明,本文方法能够精确地提取复杂城市街道环境中规则或不规则的路坎点云,且具有较强的稳健性,适用于各类复杂的城市街道环境。
关键词: 车载激光点云; 支持向量机(SVM); 多尺度点云特征; 点云特征向量; 路坎点云提取
罗海峰 , 方莉娜 , 陈崇成 . 车载激光扫描数据路坎点云提取方法[J]. 地球信息科学学报, 2017 , 19(7) : 861 -871 . DOI: 10.3724/SP.J.1047.2017.00861
Vehicle-borne laser scanning system can quickly and accurately obtain 3D point cloud data of the street scene by multiple sensors and data processing technology. Extracting street curb point clouds from vehicle-borne laser scanning data is important for many applications such as road panning and maintenance, but it is difficult to directly extract curb point clouds from the original data due to the high point density, large amount of data, uneven spatial distribution of point clouds, object obscuring each other and complex urban street scenes. A novel algorithm for extracting curb point clouds from vehicle-borne laser scanning data based on Support Vector Machine (SVM) is proposed in this paper. The algorithm is described as followings: firstly, the original data is thinned and segmented into a series of point cloud blocks to improve efficiency. Secondly, a point clouds feature vector is constructed including the relative elevation, normal vector direction, multi-scale height difference and height variance, through the analysis of spatial distribution and local geometric features of curb point clouds. Thirdly, a new method is proposed to refine the point cloud feature of the border of ground and object on the ground such as point clouds of the bottom of tree, building facade, fence, and so on, which avoids errors in dividing the border point clouds into curb point clouds. Fourthly, the obtained training samples are processed by artificial choice. Radial Basis Function (RBF) is selected as kernel. Particle Swarm Optimization (PSO) is used to optimize penalty factor C and kernel function parameter γ, then the feature vector is taken as the input to train SVM. The obtained SVM is used to extract curb point clouds from original data. Finally, cluster analysis is performed on the extracted results for eliminating noisy point clouds when the number of point clouds in cluster is less than threshold. Experiments were undertaken to evaluate the validities of the proposed algorithm with four different street scene datasets acquired by Street Mapper 360 System and Lynx Mobile Mapper System, respectively. The completeness of the results of curb point clouds extraction is over 94.99%, correctness is above 91.88%, and quality is above 90.55%. This proves that the proposed algorithm not only has high accuracy, but also has strong robustness to extract curb point clouds with regular or irregular shape from complex urban street scenes of vehicle-borne laser scanning data.
Fig. 1 Flow chart of curb points extraction from vehicle-borne laser scanning data图1 路坎点云提取流程 |
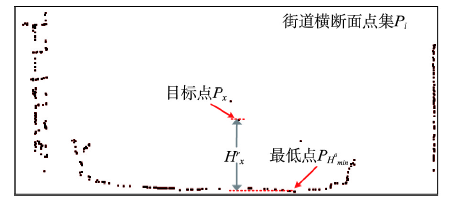
Fig. 2 The distribution of street profile point clouds图2 街道横截面点云分布 |
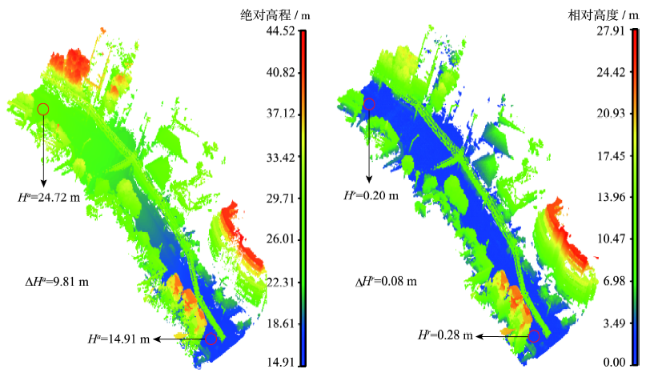
Fig. 3 The spatial distribution of absolute and relative height of point clouds图3 点云绝对高程和相对高程的空间分布 |
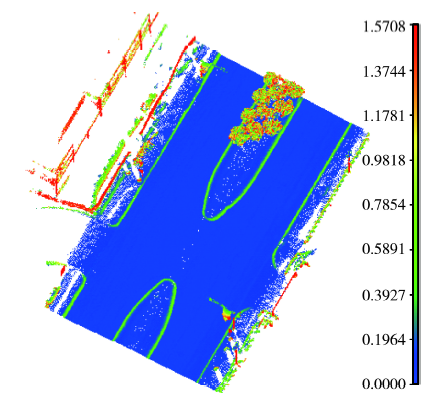
Fig. 4 The distribution of normal vector direction of street point clouds图4 街道点云法向量方向分布 |
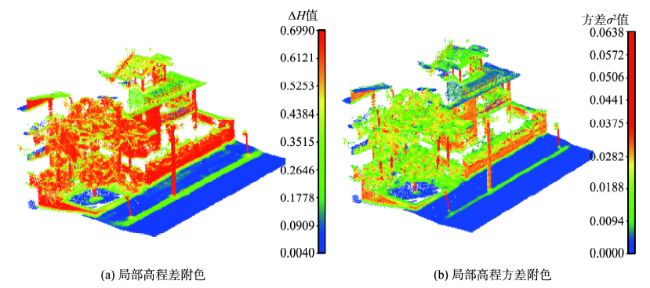
Fig. 5 The distribution of local elevation features图5 局部高程特征分布 |
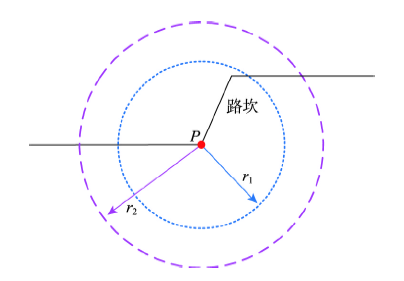
Fig. 6 Multi-scale neighborhood of the target points图6 目标点的多尺度邻域 |
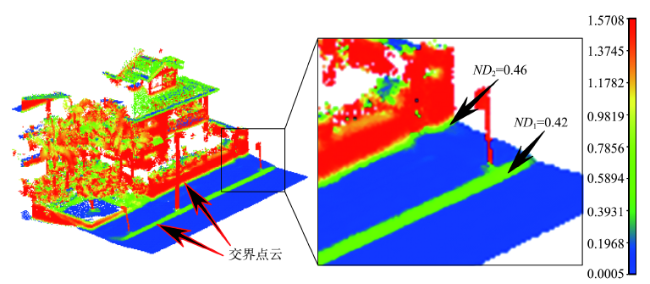
Fig. 7 The distribution of normal direction of junction point clouds图7 交界点云法向量方向分布 |
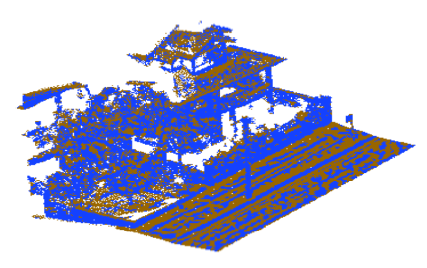
Fig. 8 The results of junction point clouds segmentation图8 交界点云划分结果 |
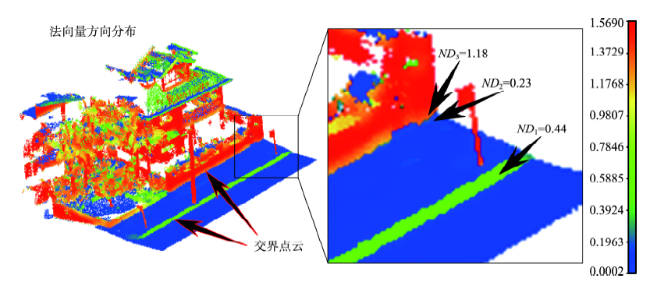
Fig. 9 The results of normal direction refinement of junction point clouds图9 交界点云法向量方向细化结果 |
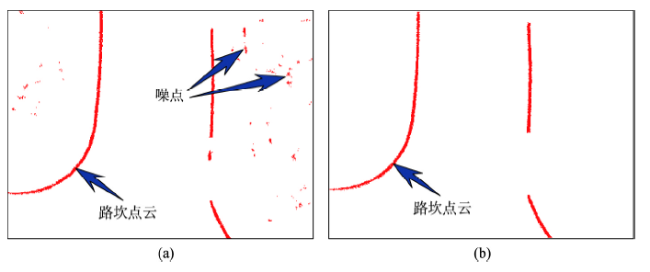
Fig. 10 The extraction results of curb points图10 路坎点云提取结果 |
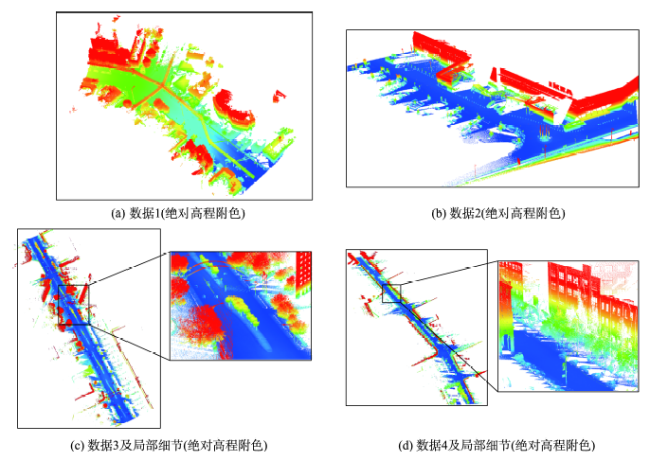
Fig. 11 Vehicle-borne laser scanning data of urban street environment图11 城市街道环境车载激光扫描数据 |
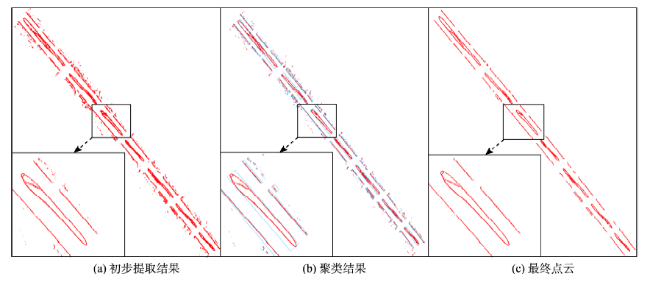
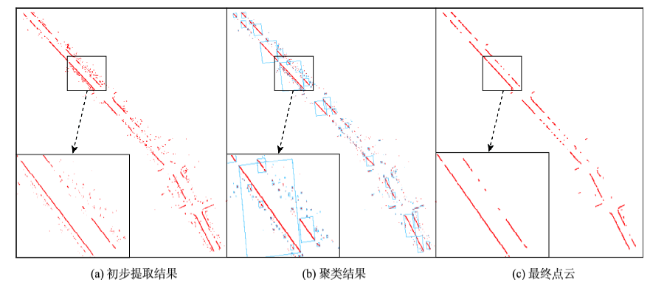
Fig. 12 Experimental results of data 1图12 数据1实验结果 |
Fig. 13 Experimental results of data 2图13 数据2实验结果 |
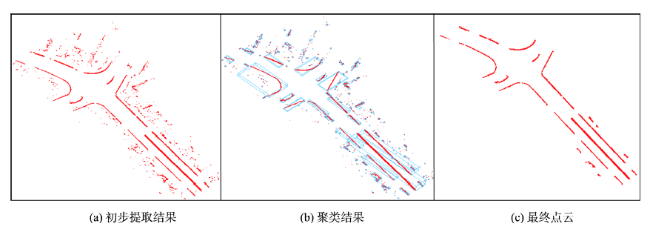
Fig. 14 Experimental results of data 3图14 数据3实验结果 |
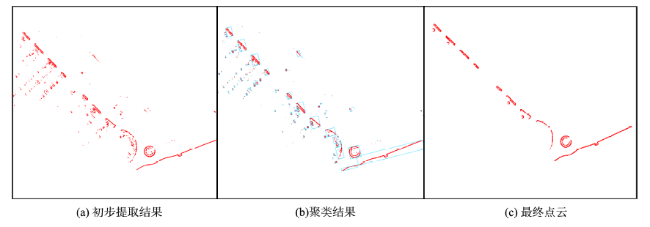
Fig. 15 Experimental results of data 4图15 数据4实验结果 |
Tab. 1 The results of curb point clouds extraction表1 路坎点云提取结果 |
| 实验结果/m | 实验数据 | |||
|---|---|---|---|---|
| 数据1 | 数据2 | 数据3 | 数据4 | |
| TP | 409.12 | 215.73 | 2344.19 | 491.88 |
| FP | 21.22 | 10.75 | 207.23 | 20.15 |
| FN | 13.12 | 11.39 | 37.32 | 13.99 |
Tab. 2 The accuracy of extraction results of curb point clouds表2 路坎点云提取精度 |
| 评价指标 (%) | 实验数据 | |||
|---|---|---|---|---|
| 数据1 | 数据2 | 数据3 | 数据4 | |
| 完整度Com | 96.89 | 94.99 | 98.43 | 97.23 |
| 准确度Cor | 95.07 | 95.25 | 91.88 | 96.06 |
| 精度Qua | 92.26 | 90.69 | 90.55 | 93.51 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}