
基于多光谱LiDAR数据的道路中心线提取
作者简介:袁鹏飞(1991-),男,硕士生,摄影测量与遥感专业,主要从事激光雷达点云数据处理研究。E-mail: pfyuan1991@foxmail.com
收稿日期: 2017-12-25
要求修回日期: 2018-03-25
网络出版日期: 2018-04-20
基金资助
国家自然科学基金重点项目(41531177)
Road Extraction Method Based on Multi-spectral LiDAR Data
Received date: 2017-12-25
Request revised date: 2018-03-25
Online published: 2018-04-20
Supported by
National Natural Science Foundation Key Project of China, No.41531177.
Copyright
针对城市三维激光点云中,道路与地面高程相差小、激光反射强度相近使得道路提取困难;广场、停车场等地物的高程、反射强度与道路极为相近,容易产生错误提取的问题。本文设计了一种描述道路条带信息的局部二进制特征(Stripe Local Binary Feature, SLBF),结合LiDAR数据中的三维信息和多光谱信息获得基于强度、密度和平坦度等统计特征(Statistics-Based Feature, SBF),并采用随机森林分类器实现了机载点云中道路面点云和非道路面点云的有效提取。通过欧式聚类精化道路点云和迭代腐蚀边界细化中心线,进而获得矢量化的道路中心线。以Waddenzee区域的多光谱机载点云数据进行实验验证,道路中心线提取结果的完整度达到94.15%,准确度达到97.95%,精度达到92.28%。实验结果表明,该方法可以有效地提取道路中心线,同时由于设计的特征具有不变性,能够适用于城市和林间小路等各种环境。
袁鹏飞 , 黄荣刚 , 胡平波 , 杨必胜 . 基于多光谱LiDAR数据的道路中心线提取[J]. 地球信息科学学报, 2018 , 20(4) : 452 -461 . DOI: 10.12082/dqxxkx.2018.170634
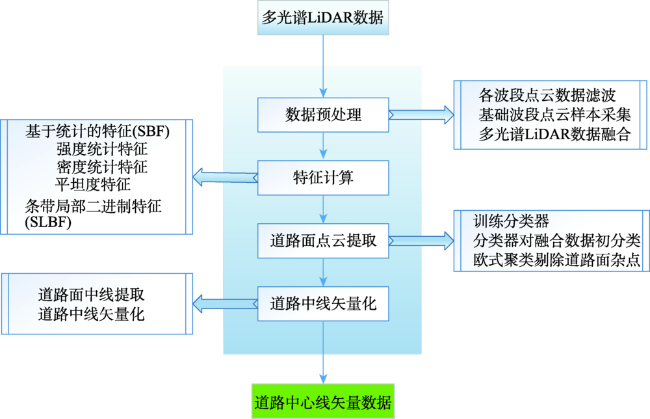
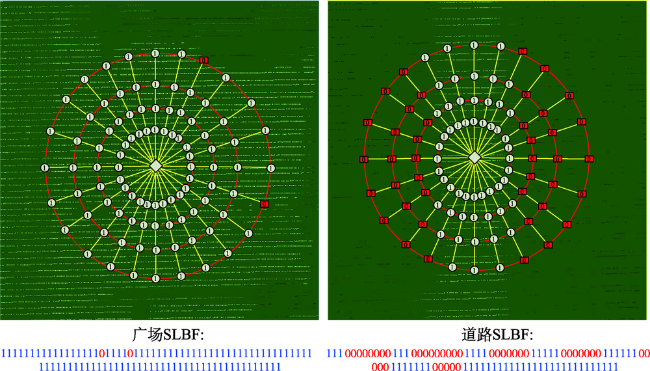
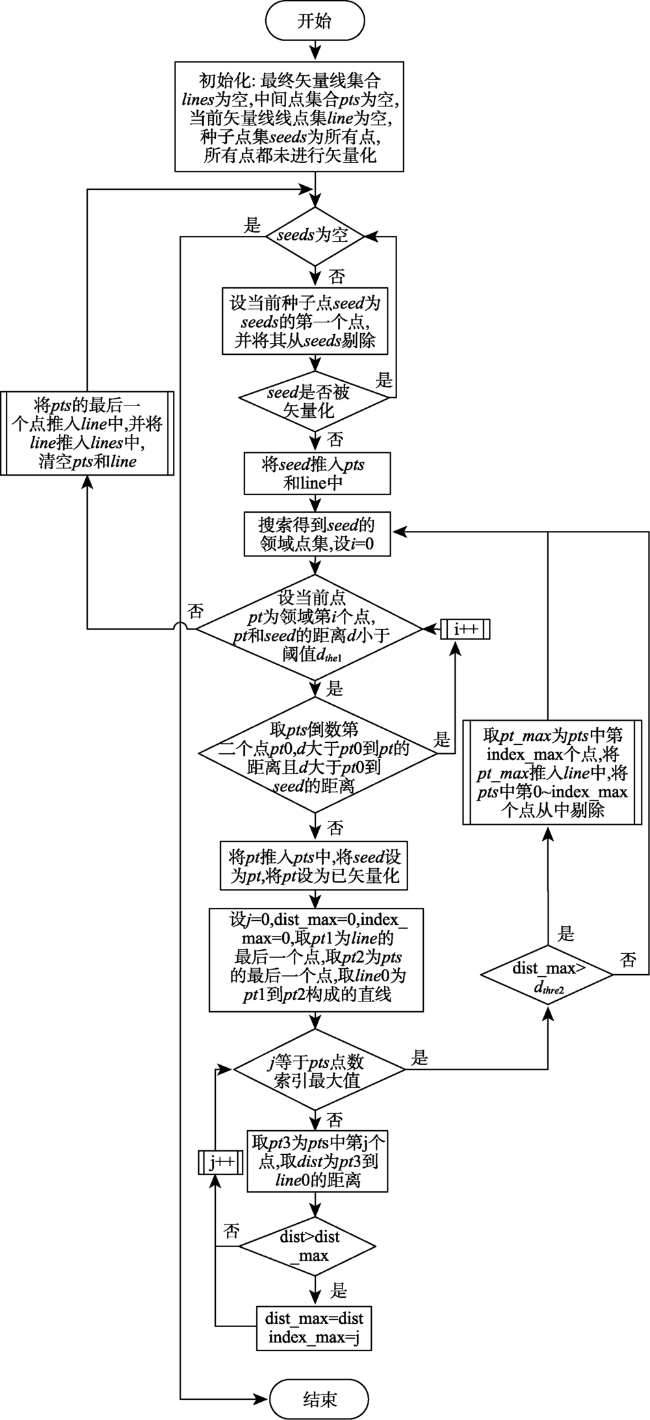
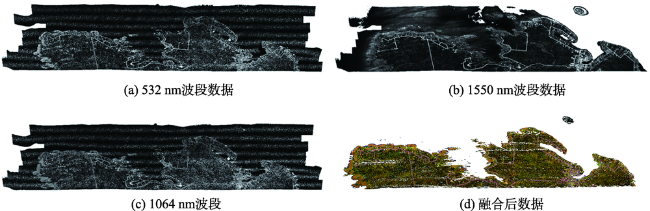
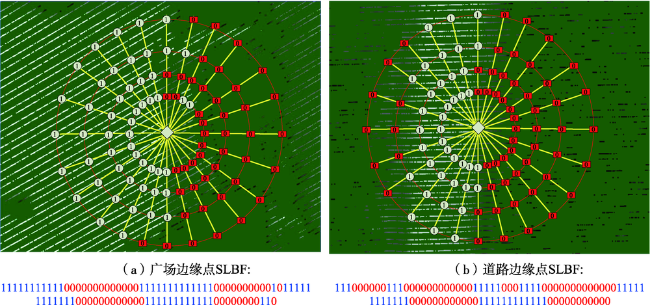
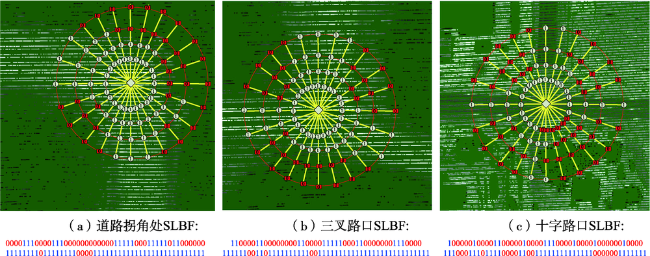
Because of the little elevation difference between road points and ground points, and the similar laser reflection intensity between them, it is relatively hard to extract the road from lidar data at present. Furthermore, the same elevation and reflection intensity among the road, square and park makes the square and park being mistaken as road unavoidable in the city environment. In order to use the three-dimensional and multi-spectral information of the LiDAR comprehensively in this paper, data preprocessing which containing the point cloud filtering, sample collection and the data fusion is conducted first. The purpose of the filtering is to get the ground points from the LiDAR data, and the data fusion achieves the consistency of the multi-spectral LiDAR data. Then, the statistical features of the ground points can be obtained based on the intensity, the density and the flatness. To describe the road′s strip feature for distinguishing road from the square and park, the strip local binary feature (SLBF) is proposed. The SLBF is gained in a circular region which are intensity comparisons between the central position and every circular region position, and it is represented by a 96-dimension feature with value of 0 or 1. The LiDAR data is then classified as the road and non-road points by the features (Statistics-Based Feature, SBF and Stripe Local Binary Feature, SLBF) proposed above through a random forest classifier. After a further refinement by an Euclidean clustering, the road axis points are extracted by the thinning of the road points step by step by the iterative corrosion boundary method. In this paper we project the LiDAR data to the horizontal plane and use the K3M method to extract the center line of the road, and then re-project it back to the three-dimension space. Finally, the extracted road axis points are vectorized as the final result of the method. We used the multi-spectral point cloud data of the Waddenzee region to verify the method proposed in the paper. The result of the experiment shows that the completeness of the road axis vectorization achieves 94.15%, the accuracy achieves 97.95%, and the precision reaches 92.28%. The experiment shows that the proposed method can extract the road points efficiently, and vectorize the road axis correctly, it can be applied to many kinds of environments such as urban and forest as the designed features have the invariance of environments.
Fig. 1 Flow chart of proposed method图1 方法流程图 |
Tab. 1 The statistics-based features表1 基于统计的特征 |
| 特征 | 统计计算方式 | 意义 |
|---|---|---|
| 强度统计特征 | 3个波段的反射强度以及这3个波段的平均反射强度、每2个波段的平均强度、另2个波段与基础波段反射强度的差值 | 利用强度的一系列统计特征进行道路的提取,是道路提取的最重要的特征,也是区分度最大的特征 |
| 3个波段反射强度最大和反射强度最小的波段标识:532 nm波段标识为-1;1064 nm波段标识为0;1550 nm波段标识为1 | ||
| 当前点k领域点的3个波段的平均反射强度、最大反射强度与最小反射强度差值、反射强度的标准差 | ||
| 密度特征 | 当前点附近的点个数,采用当前点半径r1领域内的点个数表示 | 主要利用道路点附近密度大,不是离群点这一特性 |
| 平坦度特征 | 当前点k领域点的平均高度与改点高度的差值、k领域点最大高度与最小高度的差值 | 主要利用道路比较平坦这一特性进行设计,可以很好的将非平坦,高强度,大密度的点进行剔除 |
| 当前点的离散度,离散度计算公式见式(2) |
Fig. 2 The binary features of road and square图2 广场和道路的二进制特征 |
Fig. 3 A flowchart of road axis vectorization图3 道路中线矢量化流程图 |
Fig. 4 The multispectral airborne lidar point cloud of Waddenzee图4 Waddenzee区域多光谱机载点云 |
Fig. 5 The final result of road extraction图5 最终的道路面提取结果 |
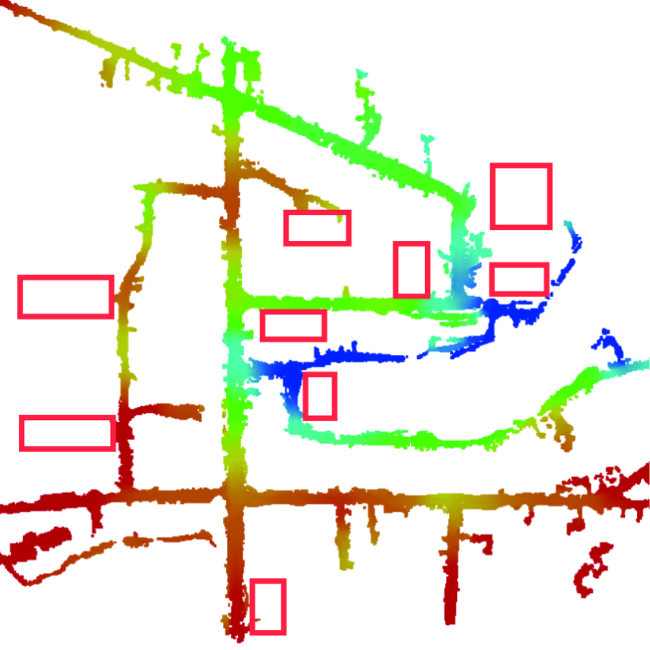
Fig. 6 The road extraction result of town region in Waddenzee图6 Waddenzee区域城镇部分的道路面提取结果 |
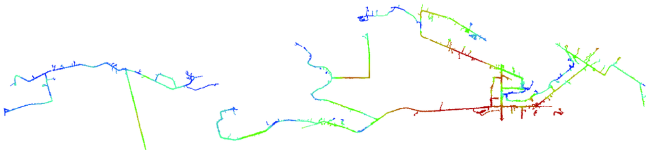
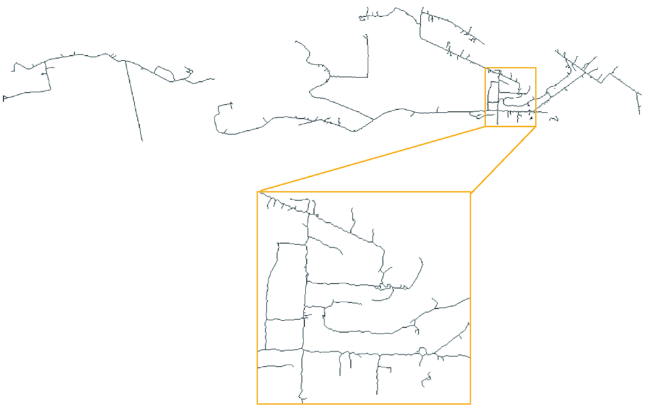
Fig. 7 The road axis vectorization result in Waddenzeeand the result of town region图7 Waddenzee区域道路中心线矢量化结果及城镇部分矢量化结果 |
Fig. 8 Less SLBF distinction between the road edge points and the square edge points图8 SLBF区分性较小的道路与广场边缘点 |
Fig. 9 SLBF features of several other cases图9 其他几种情况的SLBF特征 |
Tab. 2 The result and accuracy of the road extraction表2 道路中心线提取结果与精度 |
| TP/m | FN/m | FP/m | 完整度/% | 准确度/% | 精度/% | |
|---|---|---|---|---|---|---|
| 城镇 | 4951.79 | 235.07 | 196.49 | 95.47 | 96.18 | 91.98 |
| 郊区 | 6702.66 | 518.86 | 19.18 | 92.82 | 99.71 | 92.57 |
| 平均 | 94.15 | 97.95 | 92.28 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
[
|
| [6] |
[
|
| [7] |
|
| [8] |
|
| [9] |
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}