
基于车载激光点云的街景立面自动提取
作者简介:耿雨馨(1992-),女,硕士生,主要从事点云数据处理相关研究。E-mail: 378259897@qq.com
收稿日期: 2017-09-21
要求修回日期: 2018-01-11
网络出版日期: 2018-04-20
基金资助
国家自然科学基金项目(41371434)
Automatic Extraction of Vista Facades Based on Vehicle-borne Laser Point Cloud
Received date: 2017-09-21
Request revised date: 2018-01-11
Online published: 2018-04-20
Supported by
National Natural Science Foundation of China, No.41371434.
Copyright
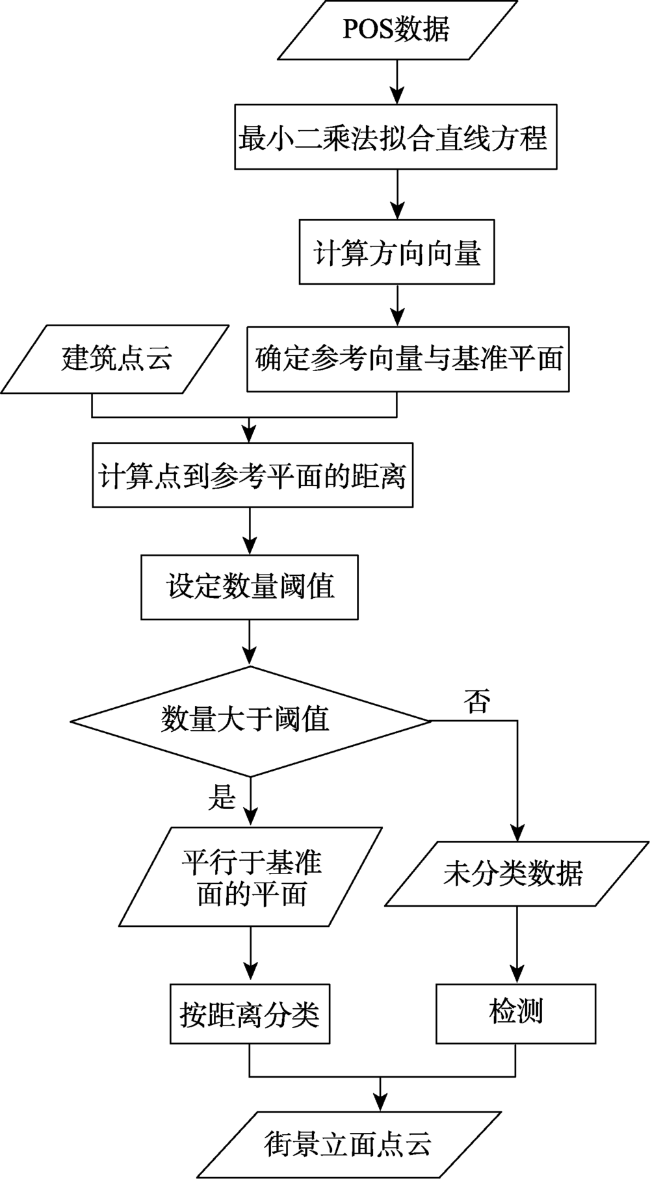
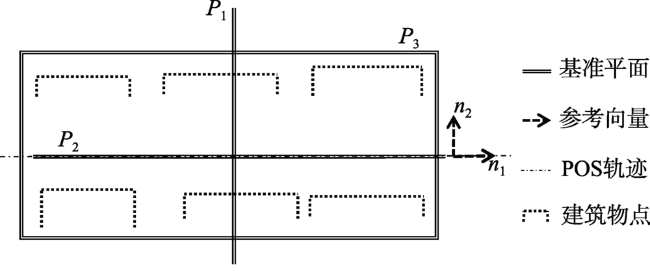
街道景观图是城市规划设计和城市管理的重要参考依据,车载点云数据能够提供沿街建筑的三维点信息,精度高,覆盖范围广泛,为街景立面整治提供了新的解决方案。为此,本文提出一种适用于车载点云的街景立面的自动提取方法,提取立面点云的具体步骤为:对原始数据去噪滤波;选取非地面点构建规则格网并二值化,依据语义特征筛选出建筑物点云;用POS数据拟合直线段帮助选取参考向量与参考平面;计算点云到参考面的距离,按距离分类点云数据,并对前述步骤中未分类点另行提取,合并面点集得到以沿街建筑物立面为主的街景立面点云。为了验证这一方法的可行性和有效性,采用点云数据进行实验,实验结果表明本方法在一定程度上提高了数据处理效率,能得到较理想的结果。
耿雨馨 , 钟若飞 , 彭宝江 . 基于车载激光点云的街景立面自动提取[J]. 地球信息科学学报, 2018 , 20(4) : 480 -488 . DOI: 10.12082/dqxxkx.2018.170440
The street landscape describes the view of buildings and other objects on both sides of the road and works as the window of a city′s overall image. It is quite vital for urban planning and design, which could be helpful reference for management of government. Vehicle-borne point cloud data, with high precision and wide coverage, can provide position information and shape characteristics of the buildings along streets. This makes it possible to provide a new solution for urban vista facades extraction. Based on facades management, we propose a novel approach for automatic extraction of vista facades from vehicle-borne laser scanning data. The detail introduction focuses on the extraction of facades. In the approach, we divided the ground points and non-ground points after de-noising raw data and separated buildings from non-ground points in order to extract vista facades. It works in following four steps: (1) denoise raw point cloud and remove surface feature points from the raw data in order to acquire points of objects on the ground; (2) construct regular grids for non-ground points with binarization processing and select points of building according to semantic features; (3) estimate the reference vectors via POS(Positioning and Orientation System) data and set those vectors as normal vectors of chosen reference planes; (4) compute the Euclidean distance between each point and each plane. Points are classified by the distances with the same plane, based on which we extract point cloud of vista facades. To verify the feasibility and effectiveness of this method, we used a large group of vehicle-borne laser point cloud to carry out a series of experiments, including separating buildings from ground in origin data,extracting facade points from building points and comparing the automatic extraction with manual selection and results of other methods. The results showed that the method could improve the efficiency of data processing to some extent and return good results. The superiority of it was also verified by experiments.
Key words: facade extraction; vehicle-borne point cloud; vista facades; POS data; normal vector
Tab. 1 Characteristics of point clouds from different types of surface features表1 不同类别地物点云特性 |
| 地物类别 | 分布特征 | 形状结构 | 点云数目 |
|---|---|---|---|
| 建筑物 | 与地面垂直高,一般不低于10 m | 面状,平面或非平面 | 多,竖直方向点密度大,水平方向点密度小 |
| 树 | 木本上部呈类球状,下部呈竖直杆状,较高,约3、4 m;灌木呈类球状,较矮,一般3 m以内;群体沿道路呈带状分布 | 类球状或类球状与杆状组合 | 较多,局部密集 |
| 路灯 | 竖直方向呈杆状延伸,同街道路灯高度一致较高,一般不低于6 m | 细长杆状 | 少 |
| 标志牌 | 由矩形或圆形的规则平面与细杆组成 | 杆状和面状组合 | 少,竖直方向局部密集 |
| 车辆 | 属于较低地物,一般不超过3 m | 带圆角的块状 | 较少,点密度比较均匀 |
Fig. 1 Flow chart of extracting facades(2) 图1 街景立面点云提取流程图 |
Fig. 2 The sketch of reference vectors and planes(3) 图2 参考向量与参考平面选取平面示意图 |
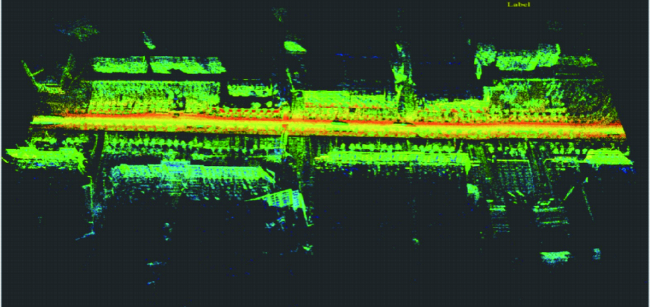
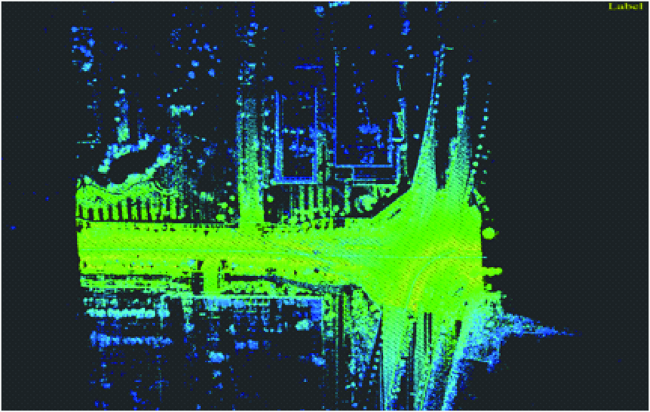
Fig. 3 Figure of raw data colored by intensity图3 原始数据的强度赋色图 |
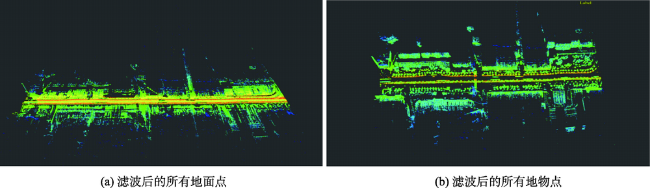
Fig. 4 Figure of data after filtering colored by intensity图4 滤波后数据的强度赋色图 |
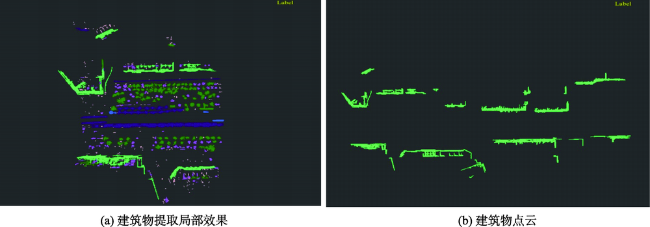
Fig. 5 Extracted point cloud data of buildings图5 建筑物点云 |
Fig. 6 Results of classification via Euclidean distance图6 局部分类效果图 |
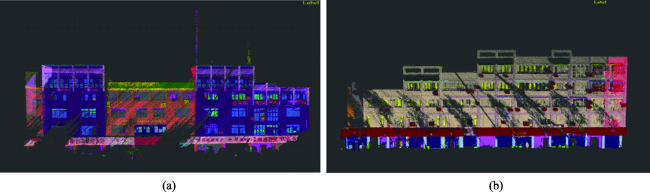
Fig. 7 Final result of automatic facade extraction图7 自动立面提取最终结果 |
Fig. 8 Manual extraction result of buildings图8 人工提取建筑物结果 |
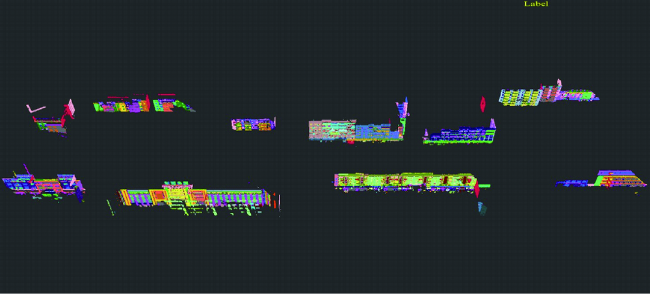
Fig. 9 Raw point cloud data图9 原始点云数据 |
Tab. 2 Comparisons of results between this method and manual extraction表2 本文提取方法精度分析 |
| 提取方法 | 总数量 | 点云总数目/个 | 误题数目/个 | 误提点数目/个 | 正确率/% | 完整率/% |
|---|---|---|---|---|---|---|
| 人工提取建筑物 | 12 | 3 239 703(噪点约 70 万) | - | - | - | - |
| 本文提取建筑物 | 13 | 2 460 954 | 1 | 78 749 | 96.899 | 92.308 |
| 人工提取立面 | 16 | 456 853(噪点约 10 万) | - | - | - | - |
| 本文提取立面 | 17 | 343 531 | 1 | 13 322 | 96.267 | 93.750 |
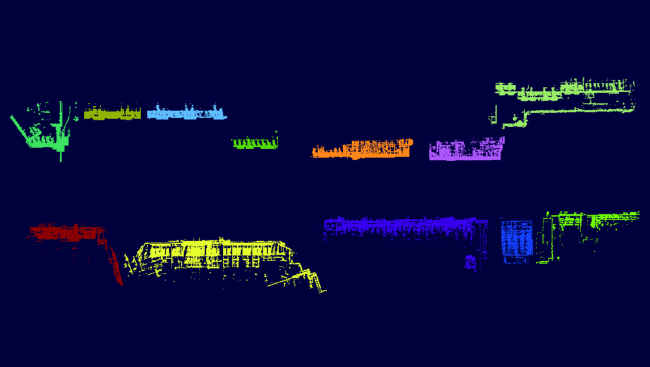
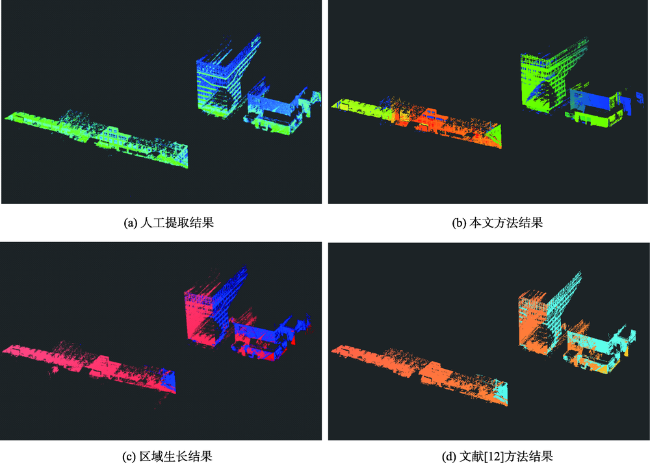
Fig. 10 Extraction results图10 提取结果 |
Tab. 3 Comparison of extracted results表3 提取结果对比 |
| 提取方法 | 提取点云数目/个 | 多提点数目/个 | 漏提点数目/个 | 准确率/% | 时间消耗/s |
|---|---|---|---|---|---|
| 人工提取 | 653 929 | - | - | - | - |
| 本文方法 | 632 066 | 922 | 22 785 | 96.517 | 346.051 |
| 区域生长 | 656 265 | 38 449 | 36 113 | 94.478 | 514.227 |
| 文献[12]方法 | 604 799 | 2034 | 51 164 | 92.176 | 987.539 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
[
|
| [8] |
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
|
| [17] |
[
|
| [18] |
|
| [19] |
[
|
| [20] |
|
| [21] |
[
|
| [22] |
[
|
| [23] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}