
基于LiDAR数据特征的湖相层三维地理信息提取
作者简介:刘 强(1985-),男,博士,讲师,主要从事泥河湾环境考古三维古环境重建理论及应用研究。E-mail: liuqiangjp@163.com
收稿日期: 2017-09-21
要求修回日期: 2018-02-26
网络出版日期: 2018-04-20
基金资助
河北省高等学校自然科学青年基金项目(QN2016251)
河北师范大学博士启动基金
河北师范大学地理学博士后启动基金项目
Three-dimensional Geographic Information Extraction of Nihewan Lacustrine Sediments Based on LiDAR Data
Received date: 2017-09-21
Request revised date: 2018-02-26
Online published: 2018-04-20
Supported by
Natural Science Youth Fund Project of Hebei Education Department No.QN2016251
Doctor Start-up Fund of Hebei Normal University
Postdoctoral Startup Fund for Geography of Hebei Normal University.
Copyright
泥河湾盆地的化石和旧石器遗址与泥河湾古湖、古河道有极强的相关性,如果发现了湖滨相和河流阶地的沉积地层,那么下一步很可能发现古人类活动留下来的化石和旧石器遗址。本文按照广义DEM的定义,将DEM的表达对象“地形表面”改为“泥河湾更新世湖相沉积层”称为湖相层DEM,泥河湾更新世湖相层DEM的建立可以大大推进泥河湾地区的古人类活动及古地理环境的研究。本文通过提取湖相层的三维地理信息,以禾尧庄剖面为例,研究了露头信息的泥河湾更新世湖相层三维地理信息提取方法。采用三维激光扫描仪采集剖面的三维地理信息,基于LiDAR点云的数据特征设计滤波方法,针对剖面采集点的距离近似相等,采用回波强度进行区分植被及土质,得到了一定的效果。在回波强度滤波后的结果基础上,进一步利用RGB信息设置阈值,区分植被和土质,得到了较好的效果。最后,经过手动去噪,得到干净、地层信息完整的剖面三维地理信息数据,可以做为湖相层DEM建模的基础数据。
刘强 , 傅学庆 , 黄华芳 , 党海燕 , 于国超 , 李仁杰 , 张军海 . 基于LiDAR数据特征的湖相层三维地理信息提取[J]. 地球信息科学学报, 2018 , 20(4) : 489 -495 . DOI: 10.12082/dqxxkx.2018.170442
The fossil and Paleolithic sites are strongly related to the ancient lakes and ancient rivers of Nihewan Basin. If the sedimentary formations of the lakeside facies and river terraces were discovered, then the next step is likely to find the fossils and Paleolithic sites of ancient human activities. The generalized definition of DEM as "terrain surface" is changed to " lacustrine sedimentary layer of the Nihewan basin" and named as Pleistocene lacustrine layer DEM. The establishment of the Pleistocene lacustrine layer DEM of Nihewan Basin can greatly promote the study on the ancient human activities and paleogeography in Nihewan area. In this paper, the first step of establishing the Pleistocene lacustrine layer DEM in Nihewan was studied. The three-dimensional geographic information of the lacustrine layer was extracted and the geological information of the Pleistocene lacustrine layer at the outcrop section of Heyaozhuang was studied as an example. The three-dimensional laser scanner was used to collect the three-dimensional geographic information of profile, and the filtering method was designed based on the LiDAR point cloud data. The distance between the sampling points was approximated and the echo intensity was used to distinguish the vegetation and the soil. On the basis of the result of the echo intensity filtering, the RGB information is used to set the threshold to further distinguish between the vegetation and the soil quality, and the better effect was obtained. After the final manual removal of noise, a clean and complete three-dimensional geographic information data of formation integrity can be obtained which can be used as the basic data for DEM modeling of lacustrine sediments.
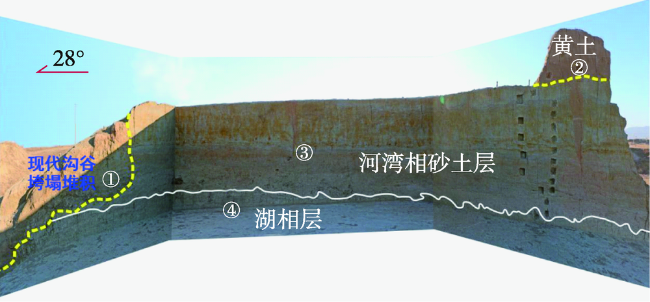
Fig. 1 Demarcation between lacustrine sediments of Nihewan and Diluvial loess图1 泥河湾湖相层与洪积黄土分界示意 |
Fig. 2 Pit profile of Heyaozhuang site图2 禾尧庄遗址探坑剖面 |
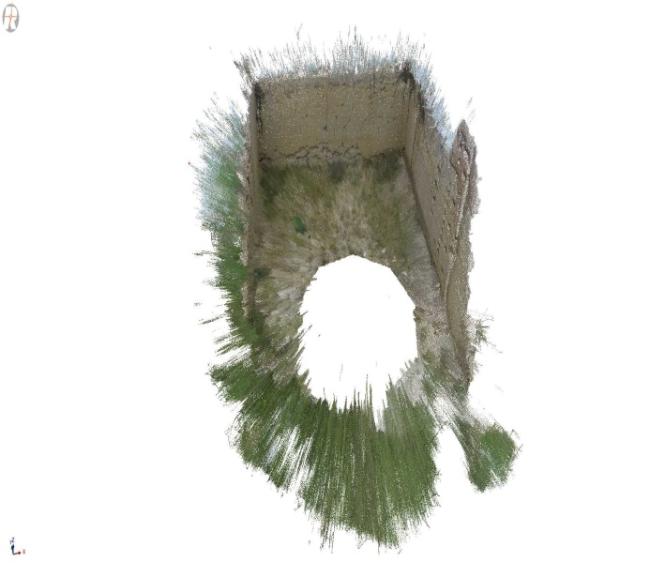
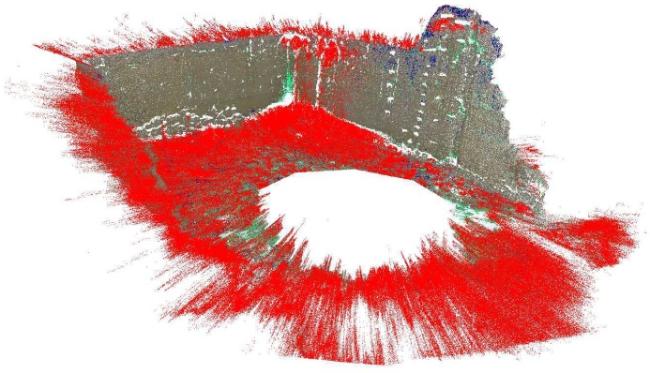
Fig. 3 3D point cloud data acquisition of Heyaozhuang profile图3 禾尧庄遗址剖面三维点云数据采集 |
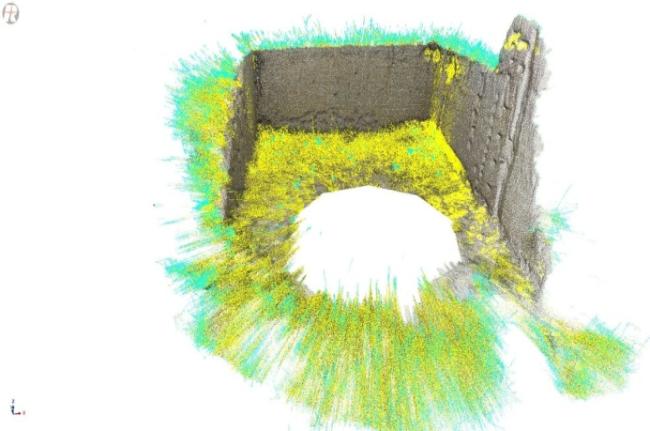
Fig. 4 Preprocessing results of Heyaozhuang 3D point cloud图4 禾尧庄遗址剖面三维点云数据预处理结果 |
Fig. 5 Threshold selection of return wave amplitude图5 回波强度阈值选择 |
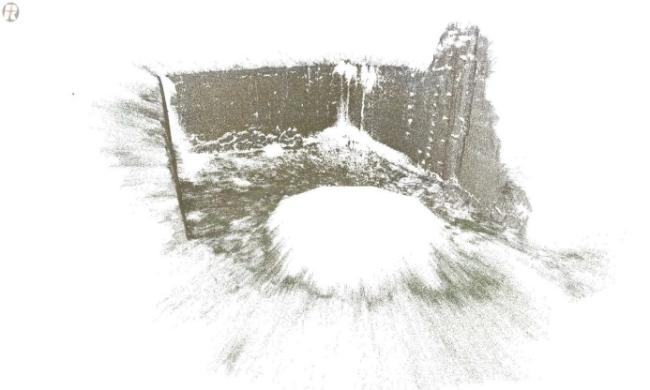
Fig. 6 Threshold filtering results of return wave amplitude图6 回波强度阈值滤波结果 |
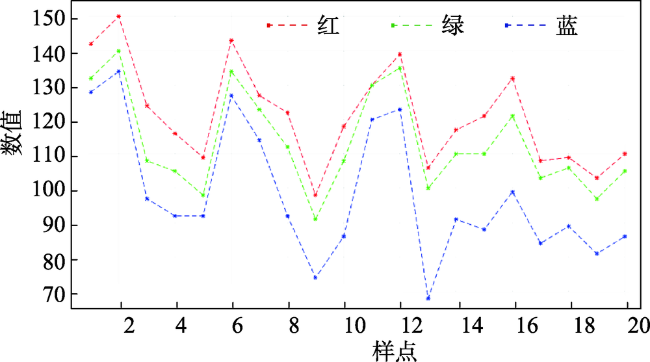
Fig. 7 RGB sampling of loess, fluvial facies sediments and lacustrine sediments图7 黄土、河湾相沉积层和湖相沉积层的RGB采样 |
Fig. 8 Pluvial loess and river facies Nihewan formation contrast sampling图8 RGB阈值滤波 |
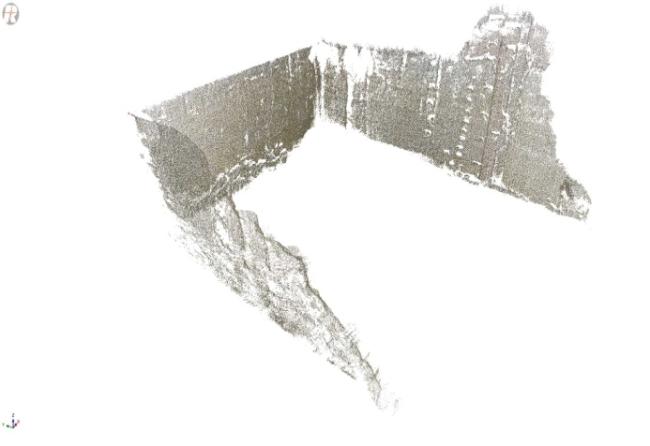
Fig. 9 Results of RGB threshold filtering图9 RGB阈值滤波结果 |
Fig. 10 Final result of Heyaozhuang profile图10 最终的剖面结果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
[
|
| [8] |
东方人类探源工程-泥河湾人类起源、地质及环境背景研究课题组.河北省东方人类探源工程年报[C].2016.
[ Oriental human grasp project-Nihewan human origins, geological and
|
| [9] |
[
|
| [10] |
[
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
[
|
| [16] |
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}