
多源数据古塔变形监测研究
作者简介:王国利(1983-),男,讲师,主要从事地面激光雷达数据处理与文化遗产保护数字化理论与方法研究。E-mail: Wangguoli@bucea.edu.cn
收稿日期: 2017-09-22
要求修回日期: 2018-01-25
网络出版日期: 2018-04-20
基金资助
国家自然科学基金项目(41601409)
北京市自然科学基金项目(8172016)
北京市教育委员会科技发展计划项目面上项目(KM201510016016、KM201810016013)
北京建筑大学科学研究基金特别委托项目(KYJJ2017024)
Deformation Monitoring of Ancient Pagoda with Multi-source Data
Received date: 2017-09-22
Request revised date: 2018-01-25
Online published: 2018-04-20
Supported by
National Natural Science Foundation of China, No.41601409
National Natural Science Foundation of Beijing, No.8172016
The Development Project of Beijing Municipal Science and Technology, No.KM201510016016, KM201810016013
Special Entrustment Project of Scientific Research Fund of Beijing University of Civil Engneering and Architecture, No.KYJJ2017024.
Copyright
建筑遗产的变形监测是遗产可持续保护的重要保障,塔类古建筑是古建筑中的典型,造型突兀高耸,变形包含沉降、倾斜、弯曲及扭转等多种状态,传统监测手段难以满足其监测需求。本文针对某古塔的变形问题,以传统测量方法为参照,采用地面激光雷达和无人机近景摄影测量技术获取古塔三维数据,结合古塔监测指标对3种方法流程、特点、数据及结果精度进行对比,通过融合三维模型对古塔病害分析,从不同的角度反映出古塔的变形状况。通过对比可知:常规测量方法进行古塔变形监测,具有精度高,应用灵活特点,适用于古建筑整体姿态或者典型特征监测;地面激光雷达技术精度高、设站灵活,能够精确分析古塔整体及部分局部的形变,但易受扫描视角的影响;无人机近景摄影测量技术建立的古塔三维模型具有高精度及真实的色彩,对整体及细节纹理表现好,但是无法获取塔内部狭窄空间的三维数据;融合数据能有效弥补单一数据源的缺陷,实现古塔全面病害分析。数据精度方面,地面激光扫描及近景摄影测量技术均可达到毫米级精度,传统监测方法在沉降与倾斜监测方面优于前2种方法,在监测全面性方面则前2种方法更具优势。
王国利 , 吴桂凯 , 王晏民 , 郭明 , 赵江洪 , 高超 . 多源数据古塔变形监测研究[J]. 地球信息科学学报, 2018 , 20(4) : 496 -504 . DOI: 10.12082/dqxxkx.2018.170446
Deformation monitoring of architectural heritage plays an important role in Sustainable Heritage Protection. Ancient pagoda is one of the typical categories of architectural heritage with complex structure, high height and various models. The deformation of pagoda includes subsidence, tilting, bending and twisting etc, and it is difficult for conventional deformation monitoring methods to meet the monitoring requirement. Terrestrial LiDAR and UAV photogrammetry technology become more and more popular in 3D data acquisition of cultural heritage with fast speed, high accuracy and non-contact capabilities. However, most of the LiDAR and UAV data are used for detail surveying and documentation. In this paper terrestrial LiDAR and UAV photogrammetry technology were selected to obtain the 3D data of ancient pagoda for deformation studies. A comprehensive comparison and analysis is made for mornitoring process, characteristics and the accuracy of three methods and complete analysis on fusion model with UAV photogrammetry and LiDAR data is made according to the monitoring index of pagoda. The main conclusions are as follow: The conventional deformation methods is flexible and have more advantages in precision, and is more suitable for monitoring of the overall attitude of ancient buildings and their typical characteristics. Terrestrial LiDAR technology has advantages in overall and local deformation of pagoda, but it′s also susceptible to scanning angle. The 3D model of pagoda built by UAV close range photogrammetry technology has high precision and real color, and performs well on the whole and detail textures, however it′s hard for the technique to acquire the 3D data of narrow space inside ancient pagoda. Fusion data model can effectively make up the defects of the single data source and realize a comprehensive deformation analysis for ancient pagoda. For accuracy of the results, terrestrial laser scanning and photogrammetric techniques can reach millimeter accuracy and is better in the comprehensive monitoring. The traditional monitoring method is superior in settlement and tilt monitoring to the first two methods.
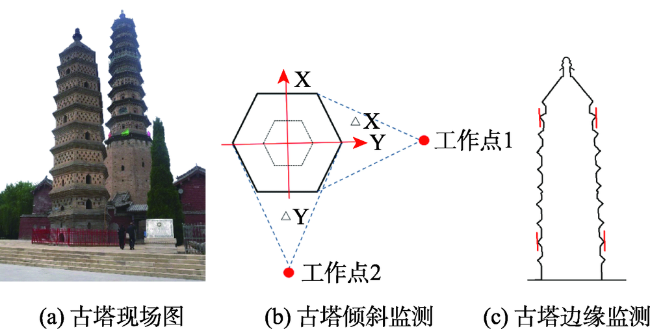
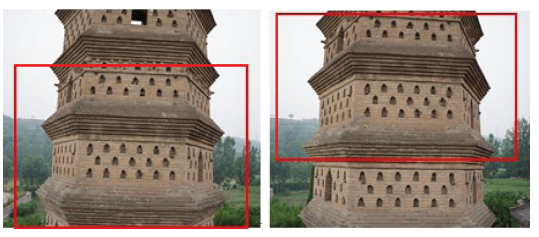
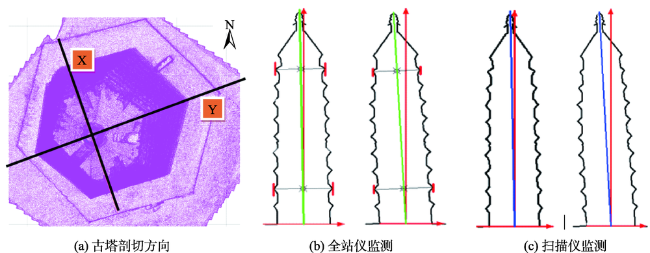
Fig. 1 Deformation monitoring of ancient pagoda图1 古塔变形监测 |
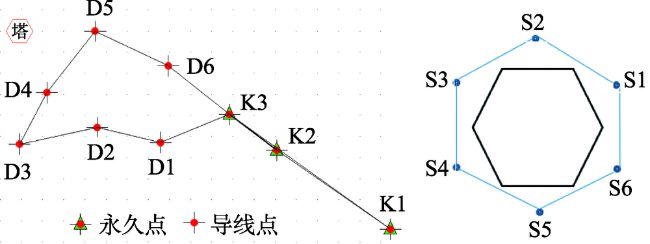
Fig. 2 Layout of transverse control network and monitoring points图2 导线控制网与水准监测点布设 |
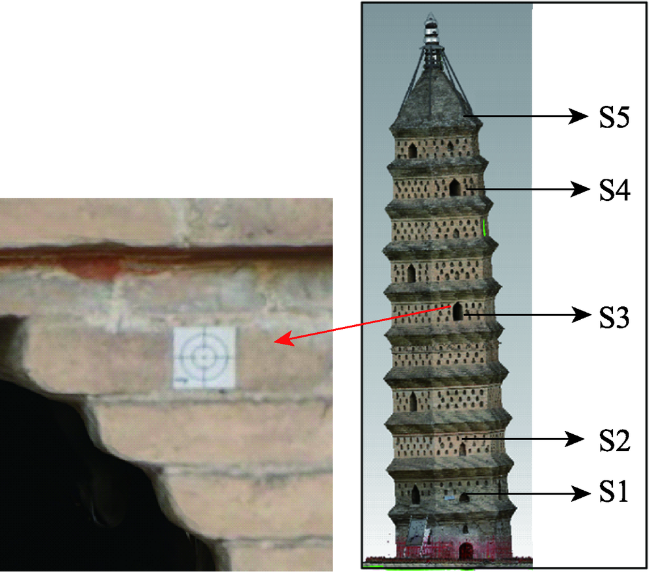
Fig. 3 Distribution of reflectors图3 反射片分布示意图 |
Tab.1 Parameters of Faro Focus3D X130表1 Faro Focus3D X130扫描仪及主要技术指标 |
| 配置 | Faro Focus3D X130 | |
|---|---|---|
| 测程/m | 0.5 ~130 | |
| 距离精度指标 | 0.6 mm/10 m | |
| 扫描视角 | 360°×120° | |
| 扫描分辨率 | 0.1mm/50m | |
| 数据获取速率 | 120万点/s |
Tab. 2 Parameters of AscTec Falcon 8表2 AscTec Falcon 8无人机及参数 |
| 飞行器类型 | V字形飞行器 | |
|---|---|---|
| 机身自重/g | 940 | |
| 任务荷载/g | ≤1200 | |
| 机身尺寸/mm | 770×820×125 | |
| 最大巡航速度/(m/s) | 15 |
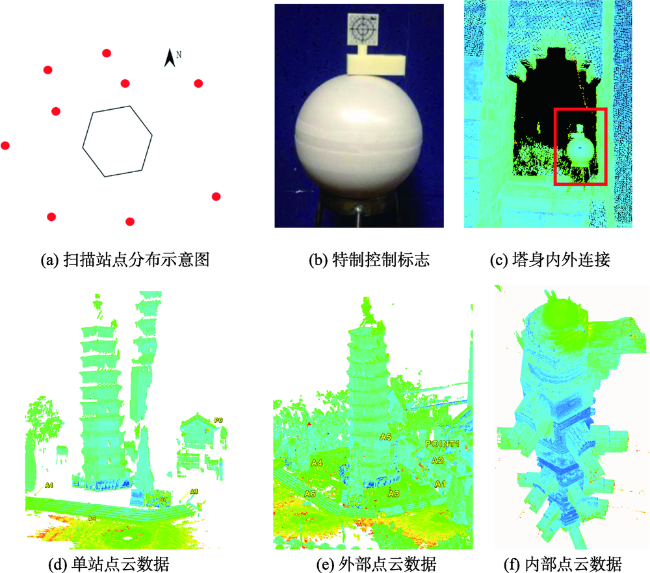
Fig. 4 Data collection of ancient pagoda图4 古塔现场数据采集 |
Fig. 5 Overlap region of adjacent images图5 相邻两张影像重叠区域示意图 |
Tab.3 Comparison for targets of TS30 and photogrammetry表3 TS30与摄影测量模型标靶点对比 |
| 层数 | 控制点 | 水平坐标 | 全站仪数据/m | 近景摄影测量数据/m | 误差/mm | 测试点 | 水平 坐标 | 全站仪数据/m | 近景摄影测量数据/m | 误差/mm |
|---|---|---|---|---|---|---|---|---|---|---|
| 第2层 | S1 | X | 525.3303 | 525.3332 | 2.9 | T1 | X | 525.7066 | 525.7093 | -2.7 |
| Y | 391.5596 | 391.5578 | -1.8 | Y | 391.7824 | 391.7813 | 1.1 | |||
| 第3层 | S2 | X | 525.7796 | 525.778 | -1.6 | T2 | X | 524.5897 | 524.5889 | 0.8 |
| Y | 391.6463 | 391.6451 | -1.2 | Y | 387.5715 | 387.5693 | 2.2 | |||
| 第6层 | S3 | X | 527.7860 | 527.7874 | 1.4 | T3 | X | 523.9101 | 523.9099 | 0.2 |
| Y | 390.2925 | 390.2936 | 1.1 | Y | 389.8885 | 389.8865 | 2.0 | |||
| 第9层 | S4 | X | 527.5651 | 527.5679 | 2.8 | T4 | X | 524.2115 | 524.2136 | -2.1 |
| Y | 389.8459 | 389.8447 | -1.2 | Y | 389.5765 | 389.5772 | -0.7 | |||
| 第10层 | S5 | X | 525.3883 | 525.3861 | -2.2 | T5 | X | 524.4872 | 524.4853 | 1.9 |
| Y | 390.0110 | 390.0132 | 2.2 | Y | 387.5796 | 387.5790 | 0.6 |
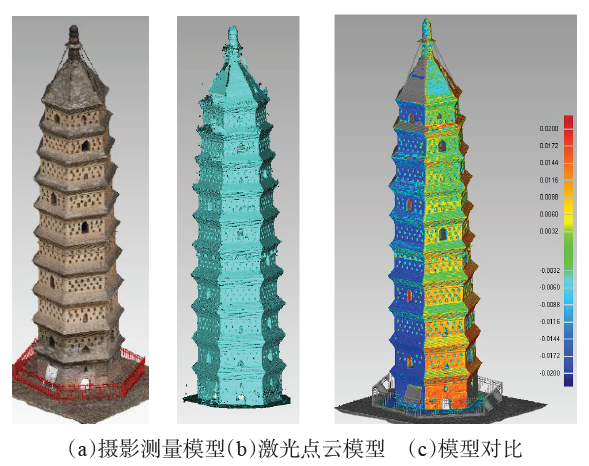
Fig.6 Comparison and analysis of 3D model by photogrammetry and LiDAR图6 摄影测量与激光点云三维模型及其对比分析 |
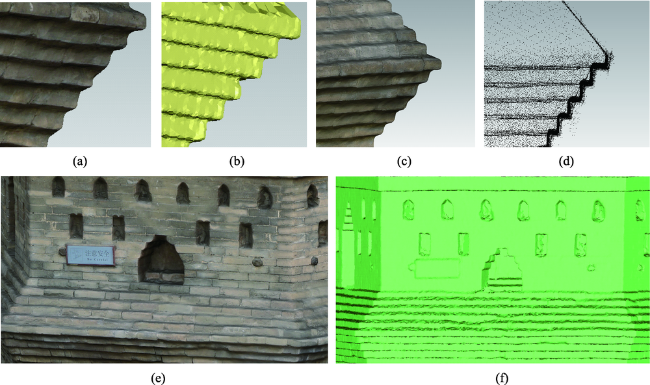
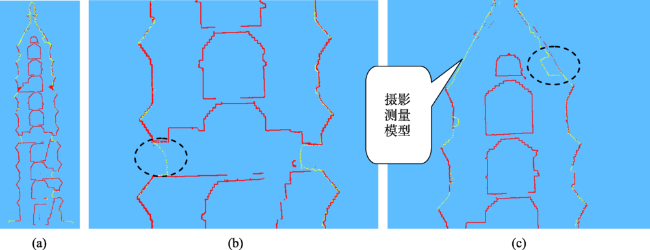
Fig. 7 Comparison of photogrammetry model and LiDAR model图7 摄影测量(图a,c,e)与激光雷达模型(图b,d,f)对比 |
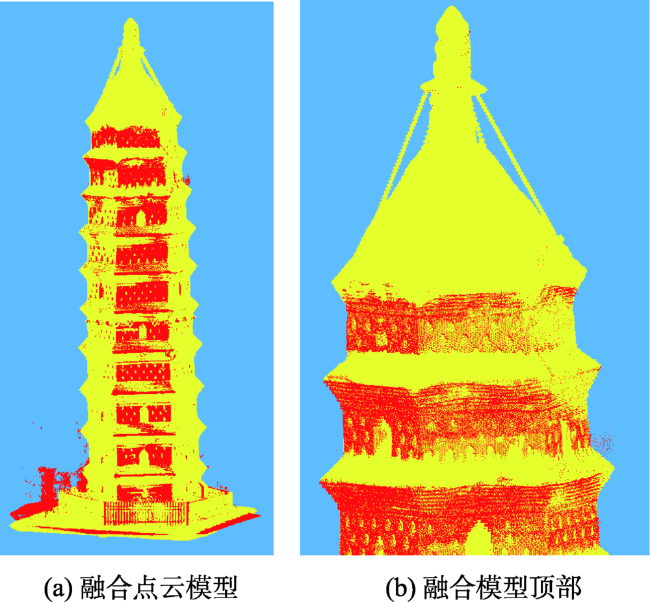
Fig. 8 Data fusion of photogrammetry model andLiDAR model 图8 摄影测量与激光雷达点云融合 |
Fig. 9 Tilt analysis of ancient pagoda图9 古塔倾斜分析示意图 |
Tab. 4 Tilt angle of Pagoda in Direction X&Y表4 古塔X&Y方向倾斜角度(°) |
| 监测周期 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 全站仪X | 0.8572 | 0.8594 | 0.8577 | 0.858 | 0.8589 |
| 扫描仪X | 0.8561 | 0.8583 | 0.8568 | 0.8572 | 0.8592 |
| 全站仪Y | 2.6886 | 2.6872 | 2.6890 | 2.6873 | 2.6895 |
| 扫描仪T | 2.6899 | 2.6875 | 2.6892 | 2.6867 | 2.6888 |
Fig. 10 Crossection of ancient pagoda and details图10 古塔结构剖面及其细部 |
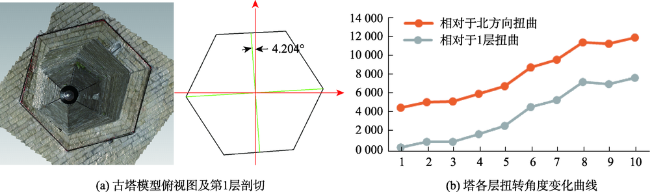
Fig. 11 Twisting analysis of pagoda图11 古塔扭转分析 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
[
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
[
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}