
海上目标多源轨迹数据关联综述
作者简介:鹿 强(1989-),男,硕士生,主要从事数据关联研究。E-mail: luqiang@ict.ac.cn
收稿日期: 2017-12-30
要求修回日期: 2018-03-26
网络出版日期: 2018-05-20
基金资助
中国科学院重点部署项目(ZDRW-ZS-2016-6-3)
广东省大数据分析与处理重点实验室开放基金项目(201804)
A Review of Multi-source Trajectory Data Association for Marine Targets
Received date: 2017-12-30
Request revised date: 2018-03-26
Online published: 2018-05-20
Supported by
Key Project of the Chinese Academy of Sciences, No.ZDRW-ZS-2016-6-3
Opening Project of Guangdong Key Laboratory of Big Data Analysis and Processing, No.201804.
Copyright
船舶自动识别系统、船舶远程识别与跟踪系统、卫星导航定位系统、导航雷达、星载雷达等海上目标监控系统互相补充,极大地增加了海上移动目标监控的广度和质量。然而,同一个移动目标在不同系统中具有不同的标识和轨迹,需要进行有效的数据融合,关联多源轨迹数据,建立各系统中移动目标的对应关系,才能形成统一的海上态势,为移动目标跟踪、轨迹数据挖掘等提供支持。本文介绍和总结了海上目标多源轨迹的常见数据源;剖析与比较了可用于移动轨迹数据关联的最近邻、概率数据关联、联合概率数据关联和多假设跟踪4种量测/航迹关联方法,和基于统计方法或模糊数学的2类航迹/航迹关联方法,以及相关工作进展;总结了常见的算法评估方式;最后讨论了现有方法适用场景问题,及其进一步的研究方向。
鹿强 , 吴琳 , 陈昭 , 王琪 , 徐勇军 , 阚荣才 . 海上目标多源轨迹数据关联综述[J]. 地球信息科学学报, 2018 , 20(5) : 571 -581 . DOI: 10.12082/dqxxkx.2018.180024
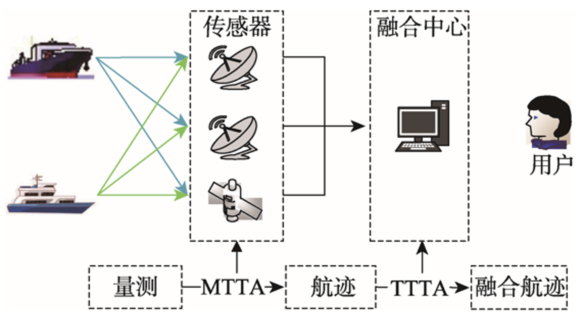
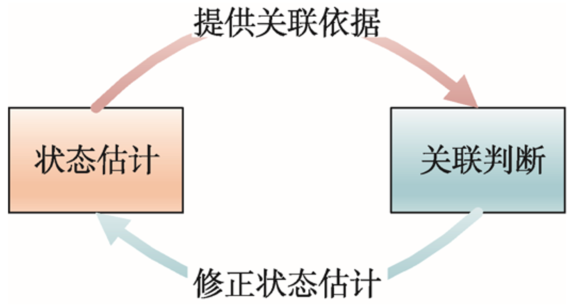
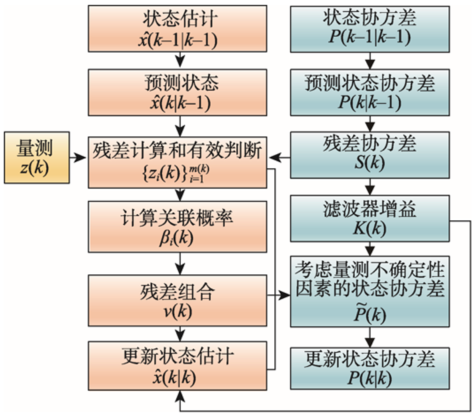
With the globalization of the Belt and Road national strategy, the volume of shipping trade is increasing rapidly. As a result, the problem of the safety of maritime navigation and monitoring has become increasingly prominent. The real-time monitoring of large-scale ships, based on the spatio-temporal data, through target tracking and information fusion is an effective method, but it also faces great challenges. Data association, as the basis and a key step of target tracking and information fusion, has important application value in military and civil fields. This paper summarizes the problems related to data association. Firstly, the data sources for trajectories of the marine targets were introduced and compared, showing its necessity and feasibility. Then two kinds of problems in data association, i.e., measurement-to-track association (MTTA) and track-to-track association (TTTA), were described. Based on the data association methods in MTTA, we abstracted a data association model consisting of state estimation and association judgment, and described the Kalman filter used generally in state estimation. After that, the basic principles and improvements of nearest neighbor (NN), probabilistic data association (PDA), joint probabilistic data association (JPDA) and multiple hypothesis tracking (MHT) were introduced. NN implements the data association using the distance between the measured and predicted values. PDA, considering only a single target, calculates the association probability of each measurement in the circumstance with presence of clutter and target missing, and associates the measurement with the maximum association probability to the target. JPDA as the extension of PDA, suitable for multiple targets, calculates the joint association probability of measurements and targets by joining all targets, and selects the association event corresponding to the maximum joint association probability as the association result. MHT is a multi-scan multi-hypothesis method and has the characteristics of track creation, maintenance, deletion and false alarm. It achieves the optimum in theory by maintaining multiple possible hypotheses generated by each association cycle. The key to the MHT is how to control the scale of the hypotheses by effective pruning in order to improve the efficiency of time and space of the algorithm. With regard to TTTA, two kinds of methods, based on statistics and fuzzy mathematics, were introduced respectively. The statistics methods consist of NN/K-NN/MK-NN, double threshold track correlation, sequential track correlation, etc. The key of fuzzy methods is the construction of fuzzy factor set and membership function. We also introduced the evaluation methods for data association. Finally, the problems in the existing methods, e.g., the application scenarios, and further researches were explained.
Tab. 1 Comparison of sensors表1 传感器类型对比表 |
| 传感器类型 | 数据信息 | 定位精度 | 覆盖区域 | 更新频率 |
|---|---|---|---|---|
| 雷达 | 目标编号、距离、方位、速度、目标大小等 | 1 m | 近海 | 秒级 |
| AIS | 经纬度、航速、航向等动态信息,及MMSI、船舶名称、船舶类型、船舶大小、船舶国籍等静态信息 | 取决于所用GNSS设备(10~100 m) | 全球 | 静态信息6 min,动态信息2 s-3 min |
| 北斗 | 经纬度、航速、航向、终端号 | 10~100 m | 亚太 | 15 min-1 h |
| Argos | 经纬度、终端号 | 250~500 m | 全球 | 小时级 |
| LRIT | 经纬度、MMSI、IMO、船舶名称 | 取决于所用GNSS设备(10~100 m) | 全球 | 6 h |
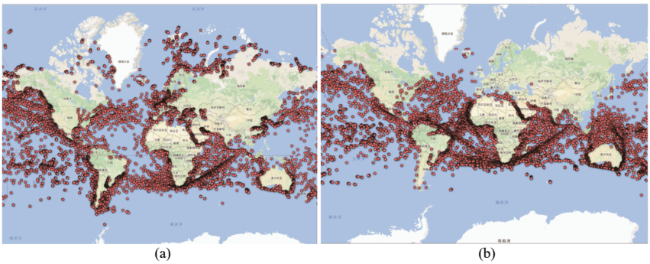
Fig. 1 The global maps of ships from two AIS sources图1 来自不同AIS数据源的全球船舶分布图 |
Fig. 2 The MTTA and TTTA illustration图2 MTTA和TTTA示意图 |
Fig. 3 The data association model图3 数据关联模型 |
Fig. 4 The outline of PDA algorithm图4 PDA算法框架 |
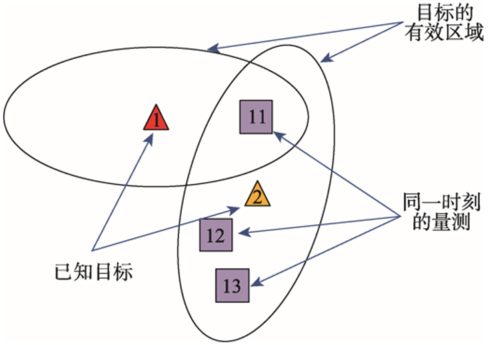
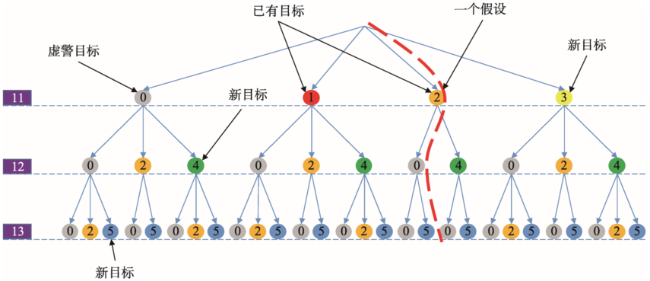
Fig. 5 The scenario for a MHT example图5 MHT示例场景 |
Tab. 2 A statistic of data quality from different AIS sources表2 来自不同AIS数据源的数据质量统计 |
| AIS数据 来源 | 总消息数 /(条/天) | 独立MMSI /(个/月) | 重复率 | 误包率 | 接收速率 平均值/(条/s) | 接收速率 标准差/(条/s) | 接收速率 最大值/(条/s) |
|---|---|---|---|---|---|---|---|
| 1 | 32 544 446 | 271 039 | 0.0432 | 0.0000 | 22 621 | 2254 | 35 365 |
| 2 | 6 781 701 | 217 269 | 0.0799 | 0.0133 | 4789 | 2428 | 33 773 |
| 3 | 7 628 919 | 28 202 | 0.4810 | 0.0040 | 5876 | 777 | 9436 |
| 4 | 19 113 170 | 103 966 | 0.3045 | 0.0113 | 13 794 | 2063 | 21 696 |
| 5 | 2 802 507 | 43 212 | 0.2291 | 0.0140 | 1953 | 562 | 30 266 |
| 6 | 3 656 542 | 37 428 | 0.1608 | 0.0017 | 2549 | 991 | 6769 |
| 7 | 8 704 245 | 58 736 | 0.0588 | 0.0053 | 6061 | 2893 | 22 326 |
| 8 | 874 060 | 6334 | 0.0885 | 0.0016 | 609 | 241 | 1457 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
MSC.1/Circ.1259/Rev.4 Long-range identification and tracking system technical documentation (part i)[S]. 2011.
|
| [6] |
MSC.1/Circ.1294/Rev.2 Long-range identification and tracking system technical documentation (part ii)[S]. 2011.
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
[
|
| [32] |
[
|
| [33] |
[
|
| [34] |
[
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
[
|
| [43] |
|
| [44] |
[ Gao Y, Chen X, Wang Y T, et al. Improved ant colony solution algorithm accelerated by GPU in track correlation[J]. Northwestern Polytechnical University, 2016,34(3):514-519. ]
|
| [45] |
[
|
| [46] |
[
|
| [47] |
[
|
| [48] |
[
|
| [49] |
[
|
| [50] |
Kazimierski, W, Stateczny A. Radar and automatic identification system track fusion in an electronic chart display and information system[J]. Journal of Navigation, 2015,68(6):1141-1154.
|
| [51] |
|
| [52] |
|
| [53] |
[
|
| [54] |
|
| [55] |
[ Zhang H, Liu Y X, Zhang J, et al. Target point tracks optimal association algorithm with surface wave radar and automatic identification system[J].Journal of Electronics & Information Technology, 2015,37(3):619-624. ]
|
| [56] |
[
|
| [57] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}