
群组目标空间方向关系建模
作者简介:禄小敏(1982-),女,博士生,主要从事空间关系及地图综合研究。E-mail: longxi06@126.com
收稿日期: 2017-12-05
要求修回日期: 2018-03-05
网络出版日期: 2018-06-20
基金资助
国家重点研发计划项目(2017YFB0504203)
国家自然科学基金项目(41371435、41561090、41761088)
The Modeling of Spatial Direction Relationship between Object Groups
Received date: 2017-12-05
Request revised date: 2018-03-05
Online published: 2018-06-20
Supported by
National Key Research and Development Program of China, No.2017YFB0504203
National Natural Science Foundation of China, No.41371435, 41561090, 41761088
Copyright
已有的空间方向关系描述模型大都针对空间单个目标,对于群组目标空间方向关系计算模型却鲜有研究和论著。为此,提出适用于群组目标空间方向关系的定性描述与定量计算模型。首先,群组目标空间方向关系定性描述模型利用带约束的Delaunay三角剖分与动态阈值“剥皮”法求得了源目标群分布边界多边形;然后,以方向关系矩阵模型为依据对其方向关系进行了定性描述与建模;其次,运用数学形态变换理论对参考目标群进行“膨胀”,求解“膨胀”后的参考目标群与源目标群的交集;最后,在此基础上结合地学信息图谱相关理论实现了群组目标空间方向关系的定量计算与建模。实验表明,群组目标空间方向关系定性描述模型较好地顾及了群组目标的空间形态对空间方向关系的影响,能够对空间方向关系做出较为准确的定性判断;群组目标空间方向关系定量计算模型实现了群组目标空间方向关系的精确定量描述,且能够以形象直观的方式对群组目标空间方向关系进行可视化表达。2种模型较好地解决了群组目标空间方向关系的描述与计算问题。
禄小敏 , 闫浩文 , 王中辉 . 群组目标空间方向关系建模[J]. 地球信息科学学报, 2018 , 20(6) : 721 -729 . DOI: 10.12082/dqxxkx.2018.170589
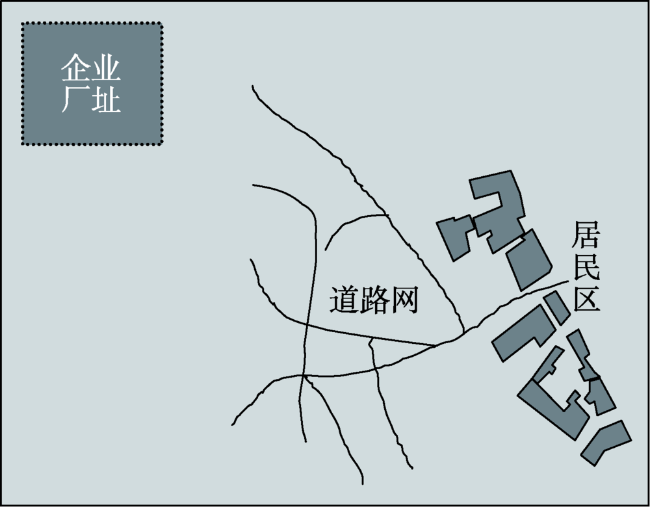
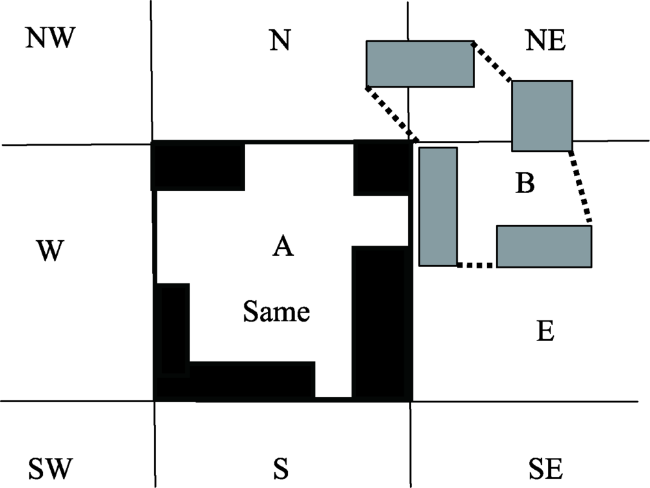
In geographic space, many objects appear in forms of groups, such as settlements, islands, roads, rivers and so on. The direction relation between object groups usually need to be identified in addition to single object's direction relation. For example, when exploring a site for a petrochemical enterprise, the direction relation between it and nearby settlements, rivers, railways need to be identified in order to reduce pollution and improve profits. But most of the existing models for spatial direction relation description aim at single spatial objects. The researches on models for object groups are rare and primitive. Therefore a qualitative description and a quantitative computation models for spatial direction relation description between object groups are proposed. The methods for qualitative description modeling are as follows. First, the minimum boundary rectangle for subject object group is constructed and its direction relation matrix is built, which consists of 9 directional regions. Secondly, the boundary polygon of source object group is computed by methods of constraint Delaunay triangulation and "stripping" with dynamic threshold. Finally, the boundary polygon is set in the direction relation matrix, the intersections of boundary polygon and 9 directional regions are computed, and the qualitative description is represented as the direction relation matrix. The main steps of quantitative computation modeling are as follows. First, the minimum boundary rectangle of subject object group is constructed. Secondly, theory of mathematical morphologic transformation is introduced to "expend" the minimum boundary rectangle of subject object group. The "expanding" starts from due north and finally end up in due north too, which translates the source object group in a series of angles with an angle increment of 5º. The intersection of the "expanded" subject object group and the source object group is computed. Finally, the spectrum density is computed and the average value as well as variance of the corresponding spectrum density are calculated. The distribution figures of spectral vector are drawn to represent the direction relation between object groups visually and vividly. Experiments were conducted respectively to illustrate the soundness and universality of the models. The experiments shows that the qualitative description model has taken the influence of spatial form on spatial direction relation into account and an accurate qualitative judgment between object groups can be made. The quantitative computation model realizes the quantitative computation of spatial direction relation which can visually represent the spatial direction relation between object groups by means of geo-information spectrum. The description and computation of spatial direction relation between object groups can be finely resolved by these two models.
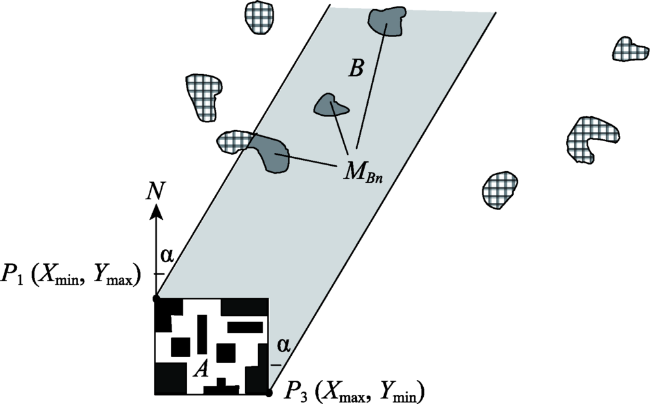
Fig. 1 Spatial direction relation among petrochemical enterprise planning area, nearby residential areas and road networks图1 石化企业规划区与附近居民区及道路网之间的空间方向关系 |
Fig. 2 Fundamentals of the model图2 模型的基本原理 |
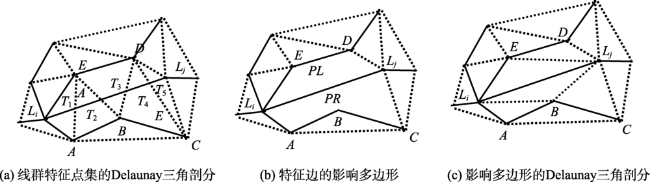
Fig. 3 Constraint Delaunay triangulation of linear group图3 线群的约束Delaunay三角剖分 |
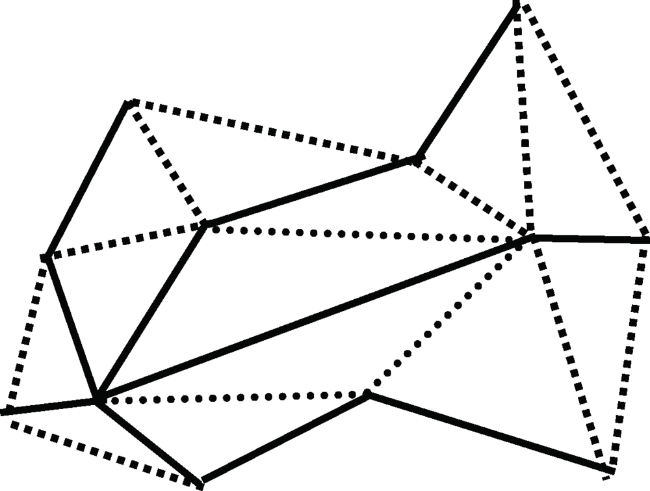
Fig. 4 Result of "stripping"图4 线群的“剥皮”结果 |
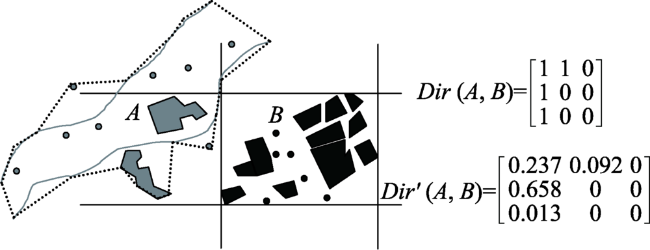
Fig. 5 The method of describing the spatial direction relations of group objects图5 群组目标空间方向关系图谱描述方法原理 |
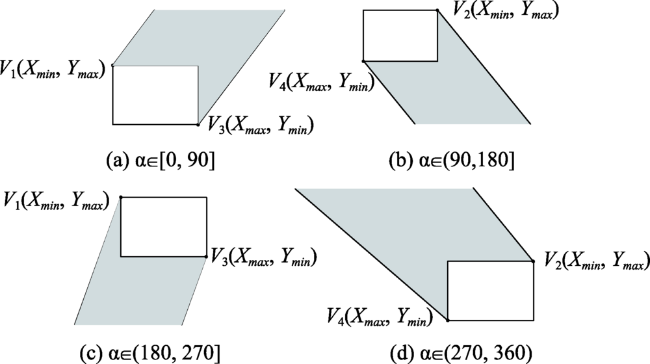
Fig. 6 Vertex selection of morphological transform图6 形态变换顶点选择 |
Tab. 1 Table of spectrum density表1 谱密度表 |
| 数目 | α | 数目 | α | ||
|---|---|---|---|---|---|
| 1 | 0 | 0.0779 | 10 | 45 | 0.0150 |
| 2 | 5 | 0.0809 | 11 | 50 | 0 |
| 3 | 10 | 0.0760 | 12 | 55 | 0.00540 |
| 4 | 15 | 0.0489 | 13 | 60 | 0.0251 |
| 5 | 20 | 0.0529 | 14 | 65 | 0.071 |
| 6 | 25 | 0.0501 | 15 | 70 | 0.072 |
| 7 | 30 | 0.0459 | 16 | 75 | 0.060 |
| 8 | 35 | 0.0380 | 17 | 80 | 0.0128 |
| 9 | 40 | 0.0335 | 18 | 85 | 0 |
| … | … | … |
Tab. 2 Spectrum characteristics of direction relation between object A and B表2 群组目标A与B的方向关系图谱特征 |
| 源目 标群 | 参考目 标群 | 方向关系 | 谱密度 均值 | 谱密度 方差 |
|---|---|---|---|---|
| B | A | Dir(B,A)=[0°,50°)∪[55°,85°) | 0.0452 | 0.02630 |
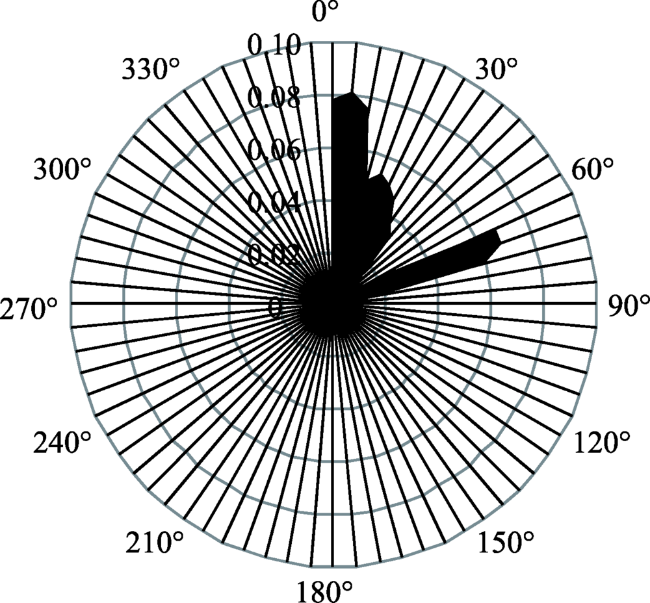
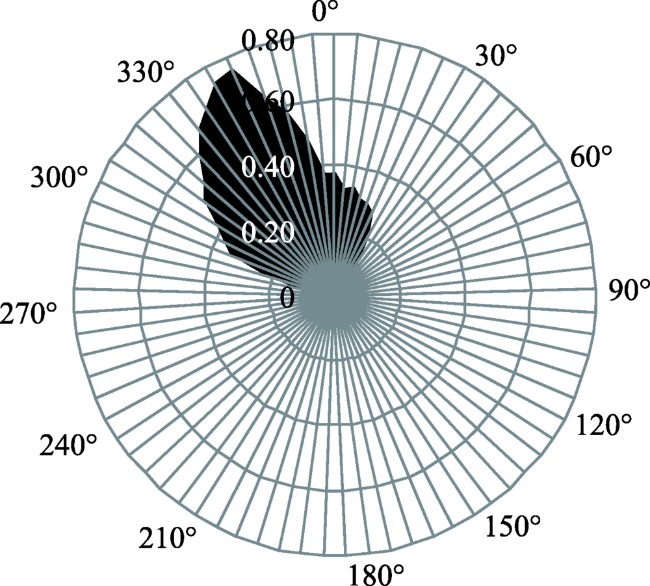
Fig. 7 Distribution of spectral vector of object group A to B图7 群组目标A相对于B的谱向量分布 |
Fig. 8 Spatial direction relation between linear group and point group图8 线群与点群之间的空间方向关系 |
Fig. 9 Spatial direction relation between linear group and polygonal group图9 线群与面群之间的空间方向关系 |
Fig. 10 Spatial direction relation between mixed group and mixed group图10 混合群与混合群之间的空间方向关系 |
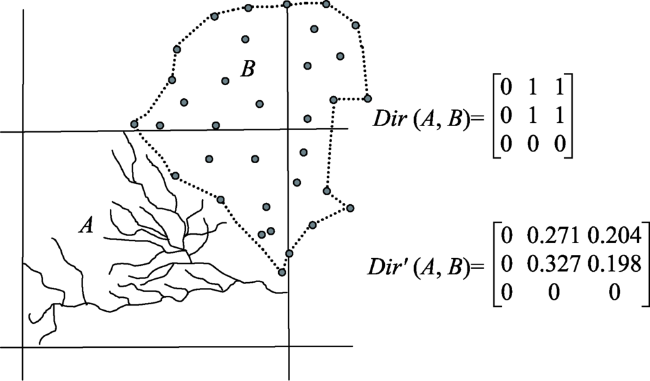
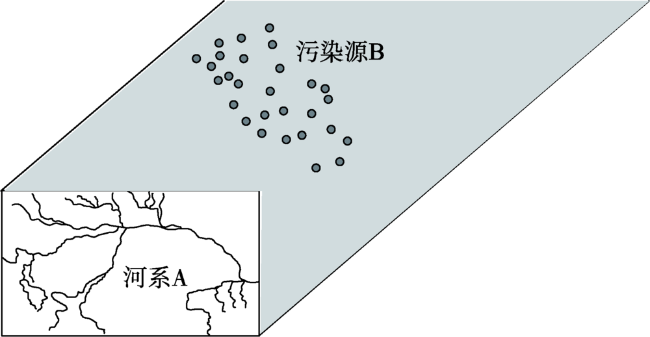
Fig. 11 Spatial direction relation between industrial river A and pollution sources B图11 河系A与污染源B的空间方向关系 |
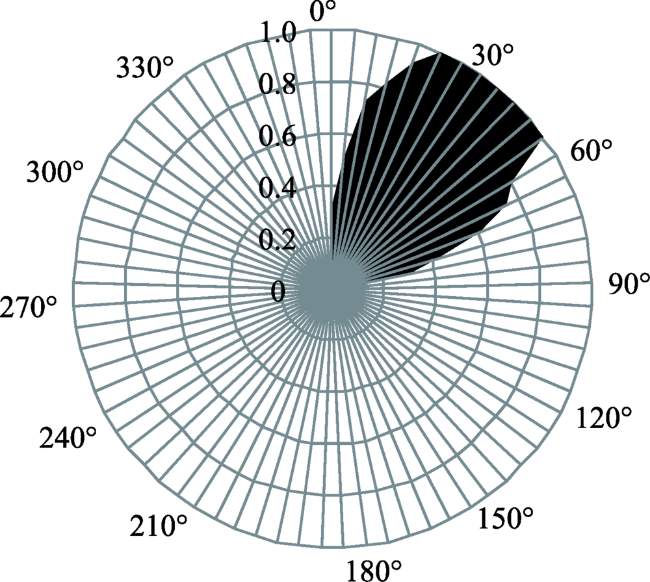
Fig. 12 Distribution of spectral vector of river A and pollution sources B图12 河系A与污染源B之间空间方向关系谱密度分布 |
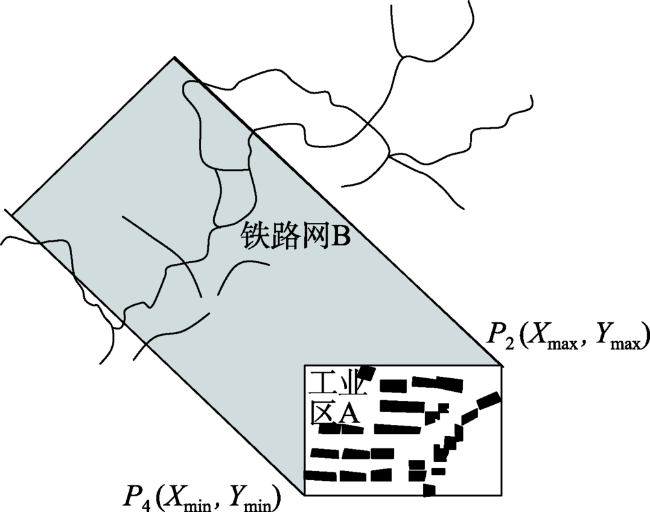
Fig. 13 Spatial direction relation between industrial area A and railway B图13 工业区A与其附近铁路网B空间方向关系 |
Fig. 14 Distribution of spectral vector of industrial area A and railway B图14 工业区A与铁路网B之间空间方向关系谱密度分布 |
Tab. 4 Spectrum characteristics of direction relation between river A and pollution sources B表4 河系A与污染源B的方向关系图谱特征 |
| 源目标群 | 参考目标群 | 方向分布 | 均值 | 方差 |
|---|---|---|---|---|
| B | A | Dir(A, B)=[0°, 90°) | 0.7378 | 0.2853 |
Tab. 5 Spectrum characteristics of direction relation between industrial area A and railway B表5 工业区A与铁路网B的方向关系图谱特征 |
| 源目 标群 | 参考目 标群 | 方向关系 | 谱密度 均值 | 谱密度 方差 |
|---|---|---|---|---|
| B | A | Dir(A, B)=[0°,40°]∪[275°, 360°) | 0.3829 | 0.2027 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
[
|
| [9] |
|
| [10] |
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
|
| [20] |
[
|
| [21] |
[
|
| [22] |
[
|
| [23] |
[
|
| [24] |
[
|
| [25] |
[
|
| [26] |
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}