
局部点、线仿射不变性约束的近景影像直线段匹配
作者简介:王竞雪(1981-),女,河南淮阳人,博士,副教授,研究方向为影像匹配与三维建模。E-mail: xiaoxue1861@163.com
收稿日期: 2018-07-25
要求修回日期: 2018-12-06
网络出版日期: 2019-01-30
基金资助
国家自然科学基金项目(41871379)
地球观测与时空信息科学国家测绘地理信息局重点实验室经费资助项目(201801)
Line Segment Matching based on Local Point-Line Affine Invariance Constraints for Close-Range Image
Received date: 2018-07-25
Request revised date: 2018-12-06
Online published: 2019-01-30
Supported by
National Natural Science Foundation of China No.41871379
Key Laboratory of Earth Observation and Geospatial Information Science of NASG, No.201801
Copyright
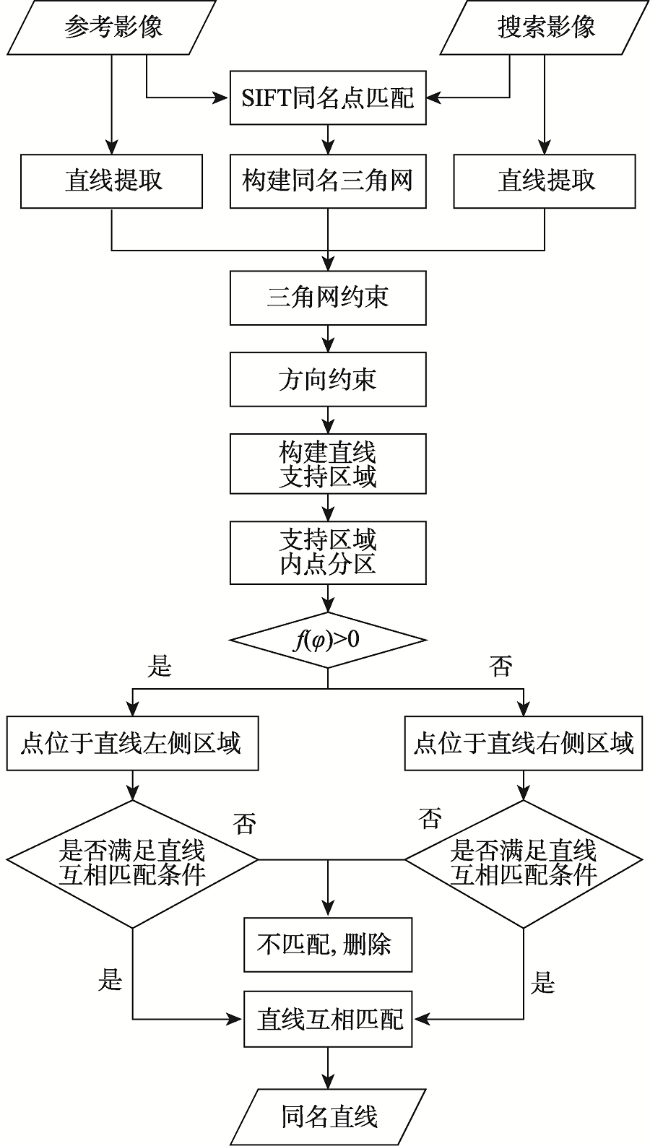
针对直线匹配过程中存在直线提取断裂、影像尺度不一、纹理断裂处灰度相似性约束可靠性弱的问题,本文提出了一种基于局部点、线仿射不变性约束的直线段匹配算法。该算法首先利用SIFT匹配得到的同名点构建参考影像、搜索影像同名三角网,并采用三角网约束直线匹配的搜索范围获得初始候选直线;然后利用方向约束对候选直线进行二次筛选,滤掉明显的错误候选直线;最后分别建立参考直线与候选直线的支持区域,搜索并确定位于直线支持区域内的匹配点并以直线为基准对其进行区域划分,并根据点、线仿射不变性原理分区域约束确定同名直线。通过选取网上公开影像数据库中典型影像对进行直线匹配实验,结果表明本文算法具有较好的鲁棒性,并能获取可靠的直线匹配结果。
王竞雪 , 崔昊 . 局部点、线仿射不变性约束的近景影像直线段匹配[J]. 地球信息科学学报, 2019 , 21(2) : 137 -146 . DOI: 10.12082/dqxxkx.2019.180339
We proposed the line-segment-matching approach with the constraint of local point-line affine invariance, to seek the solution to the fracture in straight lines extraction, the inconsistency of image scale, and the weakness of the gray similarity constraint in the texture fracture. Firstly, the corresponding triangulation network is established by the corresponding points which are obtained using SIFT(Scale-Invariant Feature Transform) matching algorithm in the references and searching images, at the same time, the candidate straight lines are obtained by triangulation network which searching range is constrained in the process of straight lines matching; Secondly, the direction constraint is used to perform secondary screening for the candidate straight lines in order to filter the candidate straight lines with obvious error. It can not only get further filter results of triangulation network constraint, but also provide a solution for angle transformation which caused by image rotation in the process of straight lines matching. The direction angles of each characteristic point of the reference image and the searching image are calculated separately, and the angle histogram is established according to the statistical results. Angle difference corresponding to the maximum peak of two histograms is called rotation angle. Finally, the support regions with the center of target straight line segment in the reference image and the corresponding support region with the center of candidate straight line segment in the searching image are both determined, and then the matching points in the support region are determined, after that the matching points are divided based on the straight line, meanwhile the corresponding straight line is determined according to subregional constraint by the principle of point-straight line affine invariance. Using proposed algorithm to perform straight line matching experiments in the typical image pairs which are selected from the online public image database, and the experiment results show that the proposed algorithm has better robustness and it can obtain reliable straight line matching results. What's more, instability problems caused by many factors exist in other algorithms of straight lines matching are improved by our algorithm.
Fig. 1 Flowchart of line matching图1 本文算法整体流程 |
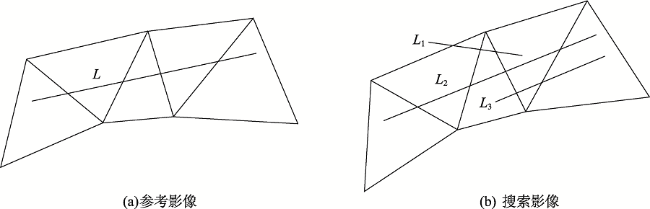
Fig. 2 Triangulation network constraint图2 三角网约束 |
Tab. 1 The value of α、β表1 α、β取值 |
| 参数 | 第1组 | 第2组 | 第3组 | 第4组 |
|---|---|---|---|---|
| α | 0.5 | 0.5 | 0.75 | 0.75 |
| β | 0.5 | 0.75 | 0.5 | 0.75 |
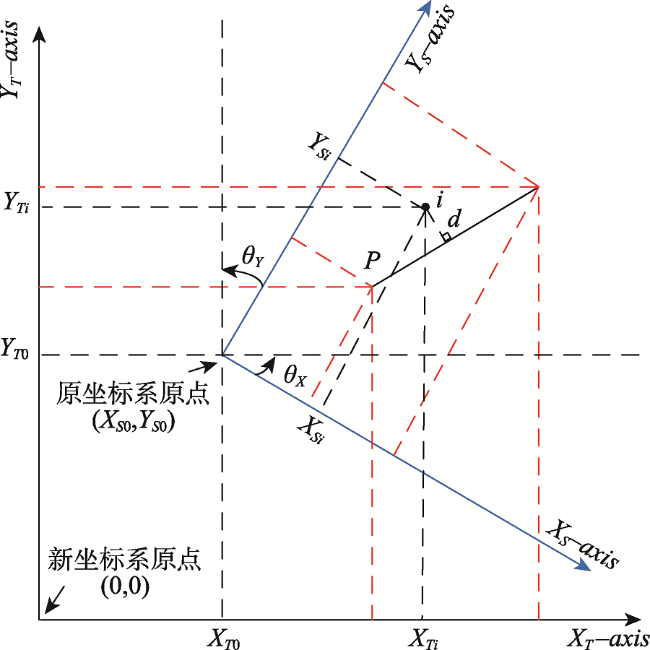
Fig. 3 Line-point affine invariance图3 点、线仿射不变性 |
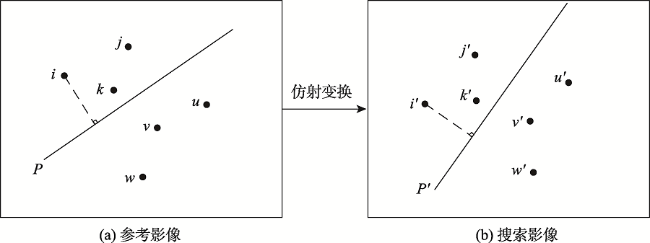
Fig. 4 The affine invariance of point and line图4 点和线的仿射不变性 |
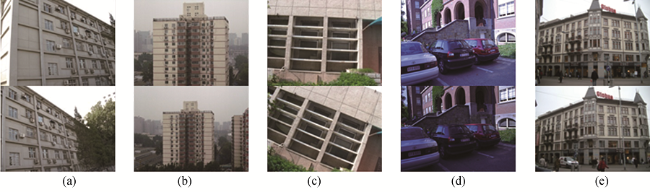
Fig. 5 Experimental image pairs图5 实验图像 |
Tab. 2 The results of matching experiments表2 匹配实验结果 |
| 实验影像 | 两影像上线提取数目/条 | α、β | MN/对 | MC/对 | MR/% |
|---|---|---|---|---|---|
| 图5(a) | (1011, 948) | 0.50、0.50 | 529 | 526 | 99.43 |
| 0.50、0.75 | 598 | 594 | 99.33 | ||
| 0.75、0.50 | 567 | 563 | 99.29 | ||
| 0.75、0.75 | 641 | 635 | 99.06 | ||
| 图5(b) | (874, 686) | 0.50、0.50 | 213 | 207 | 97.18 |
| 0.50、0.75 | 238 | 232 | 97.48 | ||
| 0.75、0.50 | 250 | 244 | 97.60 | ||
| 0.75、0.75 | 270 | 262 | 97.04 | ||
| 图5(c) | (488, 526) | 0.50、0.50 | 143 | 142 | 99.30 |
| 0.50、0.75 | 168 | 167 | 99.40 | ||
| 0.75、0.50 | 161 | 161 | 100.00 | ||
| 0.75、0.75 | 176 | 175 | 99.43 | ||
| 图5(d) | (572, 427) | 0.50、0.50 | 194 | 194 | 100.00 |
| 0.50、0.75 | 229 | 226 | 98.69 | ||
| 0.75、0.50 | 221 | 218 | 98.64 | ||
| 0.75、0.75 | 254 | 250 | 98.43 | ||
| 图5(e) | (996, 1017) | 0.50、0.50 | 234 | 225 | 96.15 |
| 0.50、0.75 | 296 | 286 | 96.62 | ||
| 0.75、0.50 | 262 | 252 | 96.18 | ||
| 0.75、0.75 | 323 | 307 | 95.05 |
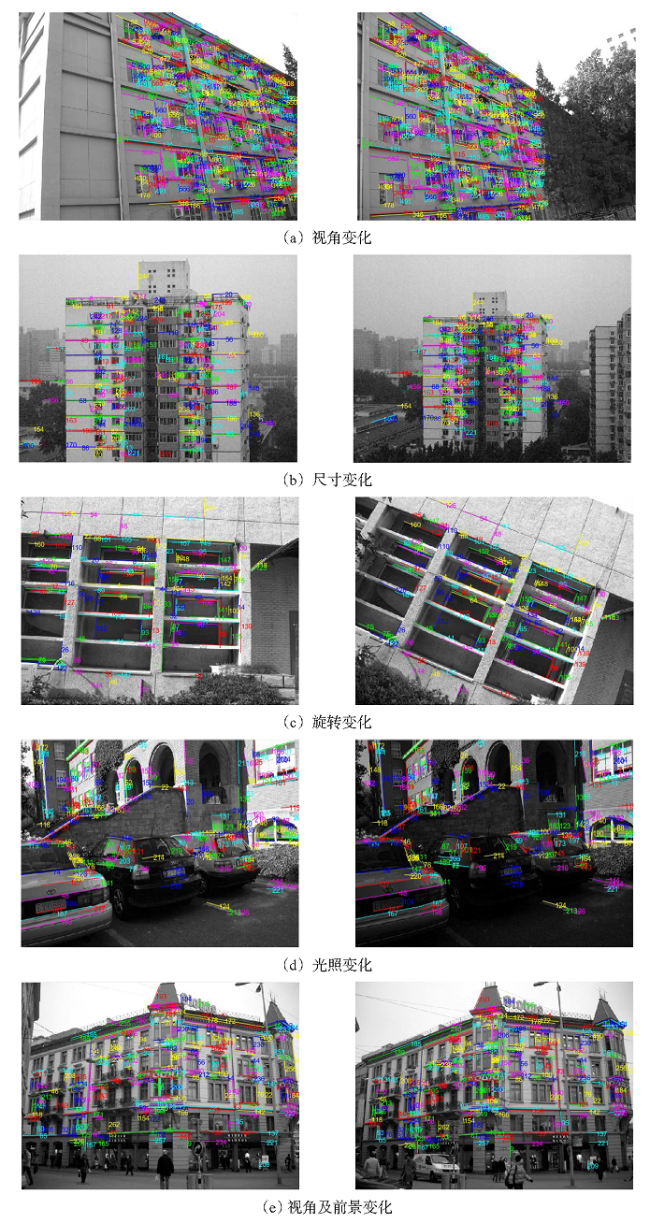
Fig. 6 The results of straight line matching图6 直线匹配结果 |
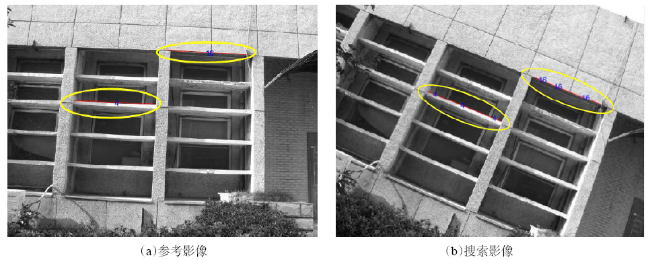
Fig. 7 Fracture line matching图7 断裂直线匹配情况 |
Tab. 3 Line matching results of different algorithms表3 不同算法的匹配结果 |
| 实验影像 | 不同算法 | MN/对 | MP/对 | MC/% |
|---|---|---|---|---|
| 图5(a) | 文献[15] | 554 | 522 | 94.2 |
| 文献[23] | 223 | 220 | 98.7 | |
| 本文算法 | 567 | 563 | 99.3 | |
| 图5(b) | 文献[15] | 24 | 9 | 37.5 |
| 文献[23] | 54 | 54 | 100 | |
| 本文算法 | 250 | 244 | 97.6 | |
| 图5(c) | 文献[15] | 148 | 115 | 77.7 |
| 文献[23] | 101 | 99 | 98.1 | |
| 本文算法 | 161 | 161 | 100 | |
| 图5(d) | 文献[15] | 271 | 250 | 92.2 |
| 文献[23] | 80 | 77 | 96.3 | |
| 本文算法 | 221 | 218 | 98.6 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
|
| [22] |
[
|
| [23] |
[
|
| [24] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}