
虚拟地理环境中基于多模式的多人动作捕捉方法
作者简介:易超(1993- ),男,江西高安人,硕士生,主要从事虚拟地理环境研究。E-mail: yichaopku@pku.edu.cn
收稿日期: 2018-09-10
要求修回日期: 2018-12-31
网络出版日期: 2019-03-15
基金资助
装备发展部预研项目(315050501)
国家自然科学基金项目(41771442、41271402)
A Method for Multi-Person Motion Capture based on Multi-Mode in Virtual Geographic Environments
Received date: 2018-09-10
Request revised date: 2018-12-31
Online published: 2019-03-15
Supported by
Pre-research Project of Equipment Development Department, No.315050501
National Natural Science Foundation of China, No.41771442, 41271402.
Copyright
虚拟地理环境对人类理解、探索地理现象以及发现地理现象之间的联系起到很重要的作用。在基于VR技术的虚拟地理环境中更高效,更自然的交互对虚拟地理环境系统的可用性以及理解、探索地理现象的效率至关重要。当前,人机交互中更自然便捷的交互依赖于动作捕捉技术,而现有的基于单种捕捉模式的动作捕捉方式,易受到遮挡、定位漂移等的影响,捕捉精度受到限制,并只能捕捉单个人的动作,不能满足虚拟地理环境对动作捕捉技术提出的特殊需求。针对单种模式的动作捕捉设备应用于虚拟地理环境受到的限制,本文分析了虚拟地理环境系统中的交互需求以及其对动作捕捉技术提出的特殊需求,创新性的提出了一种基于多种动作捕捉模式以捕捉多人动作的方法。本文方法集中于如何融合基于多种模式的多台设备的动作数据,描述了多人动作捕捉框架及其涉及到的技术,在动作捕捉效果上具有明显提升,能够捕捉多人动作,并开发了原型系统对此方法进行了验证。
关键词: 虚拟地理环境(VGE); 人机交互; 动作捕捉; 多人动作捕捉; 虚拟地球系统
易超 , 陈斌 , 袁帅 , 徐丙立 . 虚拟地理环境中基于多模式的多人动作捕捉方法[J]. 地球信息科学学报, 2019 , 21(3) : 305 -314 . DOI: 10.12082/dqxxkx.2019.180460
As the next generation of geographic language, virtual geographic environments (VGE) play an important role in understanding and exploring geographic phenomenon and in discovering associations between geographic phenomena. The development of virtual reality (VR) technology has enhanced VGE, as it provides users with a more immersive experience. However, this new technology carries problems within the human-computer interaction because the traditional methods of interaction (such as a mouse and keyboard) are no longer deemed as efficient. Greater efficiency and natural interaction is critical to the accessibility of VGE systems which rely heavily on VR technology and the efficiency of understanding and exploring geographic phenomenon. In order to interact with VGE systems more efficiently and naturally, users are required to rely less on the traditional input devices and turn to more advanced motion capture technology. This technology can provide the VGE system with more detailed information about the users. It is indisputable that motion capture technology is more advantageous than traditional input technology in many aspects. However, there are some issues with motion capture technology when applied to a VGE system, which usually has several people using the system at the same time and conversing with each other. The problems that have arisen include occlusion (caused by other people blocking the signal), positioning drift, and limited capture accuracy. In general, existing motion capture devices have failed to solve these issues because they are based on the single mode which has some limitations. Motion capture devices usually capture the actions of only a single person; therefore it cannot satisfy the demands of VGE systems. To overcome this device limitation when applied in VGE, interaction requirements within the VGE system and its special motion capture requirements were analyzed in this study. A method was proposed based on using multi-mode to enable the capture of multi-person motion. The method used in this paper has a focus on how to merge motion data from several devices in different modes, for example merging devices based on inertial positioning technology with those based on optical location tracking technology. By doing this, it is possible to solve the current issues through integrating the advantages of devices in various motion capture modes. The motion capture framework is deliberately designed to make the motion capture system more accessible, providing opportunity to develop related technologies that can merge the various real-time data streams. Through this method, significant improvements were obtained in most aspects of motion capture and a prototype system was then developed to verify the viability and efficiency of this method.
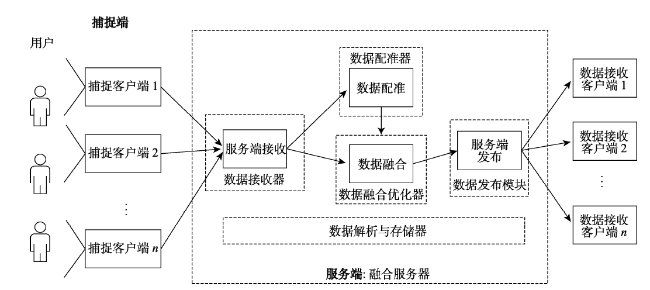
Fig. 1 Software and hardware framework for multi-person motion capture图1 多人动作捕捉软硬件框架 |
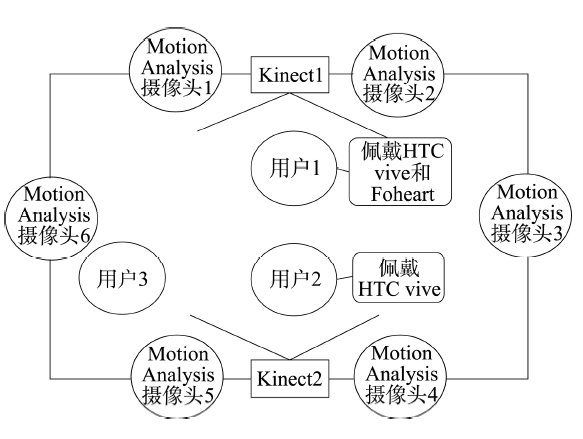
Fig. 2 Layout of experimental environment图2 实验场地布置 |
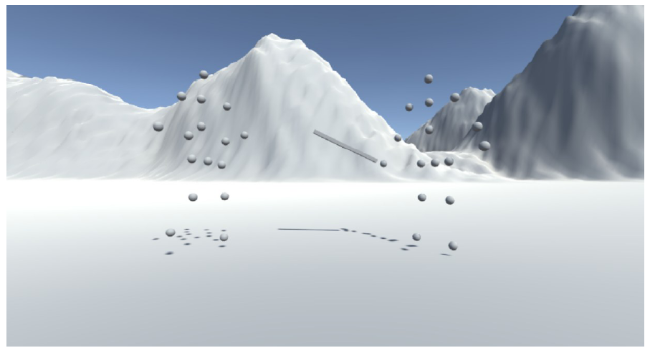
Fig. 3 Visual of motion capture results showing a discussion between users图3 动作捕捉结果可视化(用户讨论) |
Tab. 1 Result of motion capture表1 动作捕捉测试结果 |
| 动作(类型) | 延迟(不明显、 稍微、明显) | 动作丢失(不明显、 稍微、丢失严重) | 动作一致性(一致、 中等、不一致) | 多人动作协调性(协调、 一般、不协调) |
|---|---|---|---|---|
| 转向(用户与用户) | 不明显 | 不明显 | 一致 | 协调 |
| 蹲下(用户与用户) | 不明显 | 不明显 | 一致 | 协调 |
| 起立(用户与用户) | 不明显 | 不明显 | 一致 | 协调 |
| 传递(用户与用户) | 不明显 | 不明显 | 一致 | 协调 |
| 握手(用户与用户) | 不明显 | 稍微 | 中等 | 协调 |
| 研讨(用户与用户) | 不明显 | 不明显 | 一致 | 协调 |
| 指点(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 拾取(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 移动(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 放置(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 增加(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 删除(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 放大(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 缩小(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
| 漫游(用户与VGE) | 不明显 | 不明显 | 一致 | 无 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}