
无人机影像的面向对象水稻种植面积快速提取
作者简介:吴方明(1984-),男,湖北汉川人,硕士,工程师,主要从事无人机遥感研究。E-mail: wufm@radi.ac.cn
收稿日期: 2018-08-29
要求修回日期: 2019-02-20
网络出版日期: 2019-05-25
基金资助
中国科学院科技服务网络计划(STS计划)项目(KFJ-STS-ZDTP-009)
国家自然科学基金项目(41561144013、41861144019、41701496)
Object-oriented Rapid Estimation of Rice Acreage from UAV Imagery
Received date: 2018-08-29
Request revised date: 2019-02-20
Online published: 2019-05-25
Supported by
Science and Technology Service Network Initiative (STS), No.KFJ-STS-ZDTP-009
National Natural Science Foundation of China, No. 41561144013, 41861144019, 41701496.
Copyright
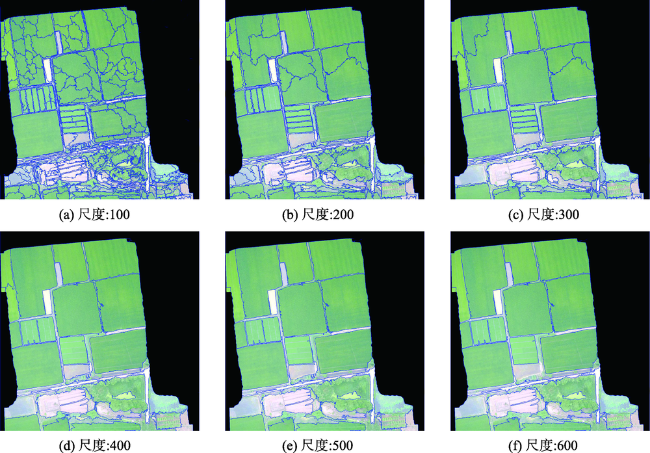
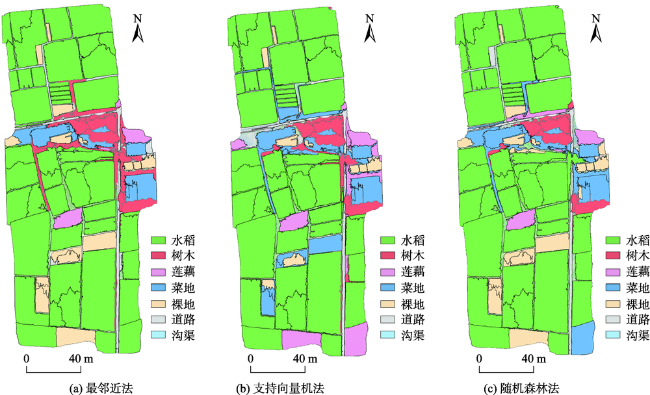
基于抽样技术的地面调查与遥感影像分类相结合的方法在大范围作物种植面积提取中得到广泛使用。无人机影像具有低成本、高时效、高分辨率的一系列优点,可以快速实现特定区域范围内的农情采样任务。本文以水稻样地为研究对象,采用便携式无人机Mavic Pro进行航拍。对所获取无人机影像进行预处理生成分辨率为3.95cm/pix的正射影像,采用面向对象的思想,目视评价和ESP工具相结合快速选择了最优分割尺度为300,应用了支持向量机、随机森林和最邻近监督分类方法对影像进行了地物分类和水稻面积快速提取。采用目视解译分类结果进行分类结果和面积精度评价,总体精度最高的方法为最邻近分类法,此时水稻分类用户精度为95%,面积一致性精度为99%。研究结果说明了无人机遥感和自动分类能够在平原水稻种植区快速获取样方内高分辨率影像并提取水稻种植面积,弥补了农田被遮挡时地面调查数据的缺失,为大范围水稻种植面积、产量等信息的计算提供样本和验证依据。
吴方明 , 张淼 , 吴炳方 . 无人机影像的面向对象水稻种植面积快速提取[J]. 地球信息科学学报, 2019 , 21(5) : 789 -798 . DOI: 10.12082/dqxxkx.2019.180418
The methodology of combining sampling-based ground survey and satellite imagery classification has been widely used in estimating crop acreage on large scales. Use of unmanned aerial vehicle (UAV) imagery has a series of merits including low cost, high efficiency, and high resolution, which make it possible to quickly monitor the agricultural conditions over a specific area. With a research focus on rice sample plots, this study used a portable UAV Mavic Pro to obtain aerial imagery. The UAV imagery were preprocessed to generate an orthophoto with a resolution of 3.95 cm/pix. By adopting the object-oriented classification philosophy, visual assessment, and the Estimation of Scale Parameter (ESP) tool, the optimal segmentation scale was determined to be 300. The support vector machine, random forest, and nearest neighborhood classifiers were employed and contrasted for imagery classification and the extraction of rice acreage; visual interpretation was used for assessing the accuracy of the classification results. The best automatic classification method turned out to be nearest neighborhood classification, with its user accuracy of rice being 95% and the area consistency accuracy 99%. The findings show that use of UAV imagery and automatic classification can quickly acquire high-resolution imagery and extract rice acreage in rice growing areas on plains. Moreover, high-resolution UAV imagery can be used as ground truth data when cropland is in shadow. The proposed approach helps provide validation samples for estimating rice acreage and production on large scales.
Tab. 1 Core specifications of the Mavic Pro UAV表1 Mavic Pro 无人机飞主要参数 |
| 飞行器 | 相机 | ||
|---|---|---|---|
| 参数名称 | 参数指标 | 参数名称 | 参数指标 |
| 重量 | 743 g(包含云台保护罩) | 影像传感器 | 1/2.3 英寸CMOS;有效像素1235万(总像素1271万) |
| 最大水平飞行速度 | 65 km/h(运动模式,海平面附近无风环境) | 镜头 | FOV 78.8° 28 mm(35 mm 格式等效)f/2.2 对焦点:0.5 m至无穷远;畸变<1.5% |
| 飞行时间 | 27min(无风环境 25 km/h 匀速飞行) | ISO 范围 | 100~1600(照片) |
| 综合续航 | 21 min(普通机动,剩余15%电量) | 电子快门速度 | 8~1/8000 s |
| 最远续航里程 | 13 km(无风环境) | 照片最大分辨率 | 4000×3000 |
Fig. 1 Orthophoto of the experimental UAV图1 实验样地无人机正射影像 |
Fig. 2 Comparison of the imagery segmentation results on multi-scales图2 多个尺度影像分割对比 |
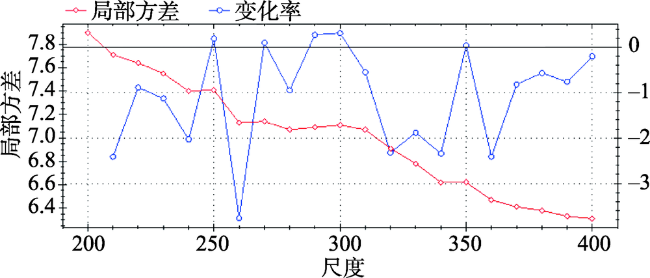
Fig. 3 Optimal scale parameter determined by the ESP tool图3 ESP工具计算得到的最优分割尺度 |
Fig. 4 Segmentation result of the UAV Image with the scale parameter set to 300图4 无人机影像在尺度为300时的分割结果 |
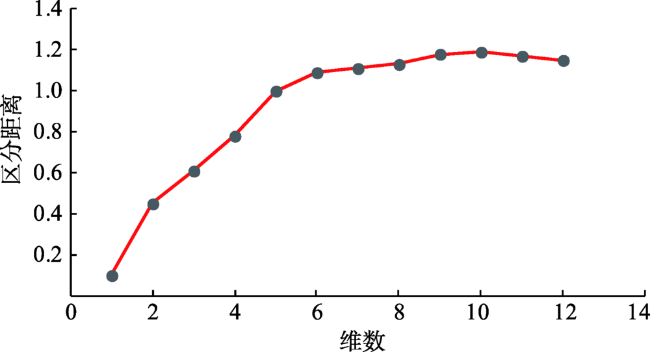
Fig. 5 The relationship between class separability and the number of image features used for classification图5 类间可分性(区分距离)与用于分类的特征数量的关系 |
Fig. 6 UAV imagery classification results by different supervised classification methods图6 不同监督方法的无人机影像分类结果对比 |
Tab. 2 Landuse classification obfuscation matrix of verification samples表2 验证样本地物分类混淆矩阵 |
| 分类方法 | 地物类别 | 水稻 | 莲藕 | 树木 | 裸地 | 菜地 | 道路 | 沟渠 | 用户精度/% |
|---|---|---|---|---|---|---|---|---|---|
| 最邻近法 | 水稻 | 42 | 1 | 1 | 95 | ||||
| 莲藕 | 2 | 1 | 67 | ||||||
| 树木 | 9 | 2 | 1 | 75 | |||||
| 裸地 | 12 | 1 | 92 | ||||||
| 菜地 | 6 | 100 | |||||||
| 道路 | 1 | 1 | 5 | 71 | |||||
| 沟渠 | 1 | 3 | 75 | ||||||
| 制图精度/% | 100 | 100 | 90 | 92 | 55 | 83 | 60 | ||
| 总体精度/% | 89 | ||||||||
| kappa系数 | 0.84 | ||||||||
| 支持向量机法 | 水稻 | 42 | 100 | ||||||
| 莲藕 | 2 | 1 | 2 | 40 | |||||
| 树木 | 9 | 2 | 1 | 100 | |||||
| 裸地 | 12 | 1 | 88 | ||||||
| 菜地 | 6 | 43 | |||||||
| 道路 | 1 | 1 | 5 | 100 | |||||
| 沟渠 | 1 | 3 | 42 | ||||||
| 制图精度/% | 100 | 100 | 90 | 54 | 55 | 67 | 60 | ||
| 总体精度/% | 82 | ||||||||
| kappa系数 | 0.75 | ||||||||
| 随机森林法 | 水稻 | 42 | 1 | 98 | |||||
| 莲藕 | 2 | 1 | 67 | ||||||
| 树木 | 8 | 1 | 100 | ||||||
| 裸地 | 12 | 3 | 80 | ||||||
| 菜地 | 7 | 2 | 78 | ||||||
| 道路 | 1 | 4 | 80 | ||||||
| 沟渠 | 1 | 2 | 3 | 50 | |||||
| 制图精度/% | 100 | 100 | 80 | 92 | 64 | 67 | 60 | ||
| 总体精度/% | 88 | ||||||||
| kappa系数 | 0.73 | ||||||||
Tab. 3 Accuracy assessment for land surface acreage表3 地物面积一致性精度 |
| 类别 | 实测面积/m2 | 最邻近法 | 支持向量机法 | 随机森林法 | |||||
|---|---|---|---|---|---|---|---|---|---|
| 预测面积/m2 | 相对误差/% | 预测面积/m2 | 相对误差/% | 预测面积/m2 | 相对误差/% | ||||
| 水稻 | 16 508 | 16 385 | 0.75 | 15 876 | 3.83 | 16 112 | 2.40 | ||
| 裸地 | 1612 | 1597 | 0.93 | 531 | 67.06 | 1699 | 5.40 | ||
| 菜地 | 1242 | 1179 | 5.07 | 1980 | 59.42 | 1962 | 57.97 | ||
| 沟渠 | 1077 | 1067 | 0.93 | 1695 | 57.38 | 1385 | 28.60 | ||
| 莲藕 | 482 | 427 | 11.41 | 1410 | 192.53 | 567 | 17.63 | ||
| 树木 | 1628 | 1817 | 11.61 | 1157 | 28.93 | 866 | 46.81 | ||
| 道路 | 483 | 561 | 16.15 | 384 | 20.50 | 442 | 8.49 | ||
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
|
| [11] |
[
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
|
| [22] |
[
|
| [23] |
全国绿化委员会办公室. 2017年中国国土绿化状况公报[N].人民日报,2018-03-13(017).
[ National Aflorestation Environmental Protection Commission. Bulletins on aflorestation environmental situations of China in2017[N]. People's Daily, 2018-03-13(017). ]
|
| [24] |
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}