
基于移动对象轨迹的室内导航网络构建方法
作者简介:傅梦颖(1993-),女,安徽六安人,硕士生,研究方向为地理信息服务。E-mail: 1429137226@qq.com
收稿日期: 2019-01-16
要求修回日期: 2019-03-11
网络出版日期: 2019-05-25
基金资助
国家自然科学基金项目(41771436)
国家重点研发计划项目(2016YFB0502104、2017YFB0503500)
数字福建建设项目(闽发改网数字函[2016]23号)
A Method for Constructing Indoor Navigation Networks based on Moving Object Trajectory
Received date: 2019-01-16
Request revised date: 2019-03-11
Online published: 2019-05-25
Supported by
National Natural Science Foundation of China, No.41771436
National Key Research and Development Program of China, No.2016YFB0502104, 2017YFB0503500
Digital Fujian Program, No.2016-23.
Copyright
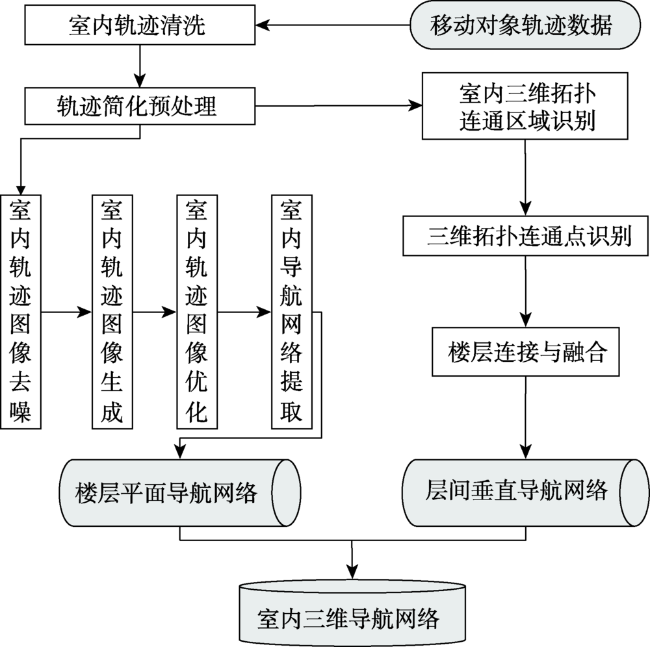
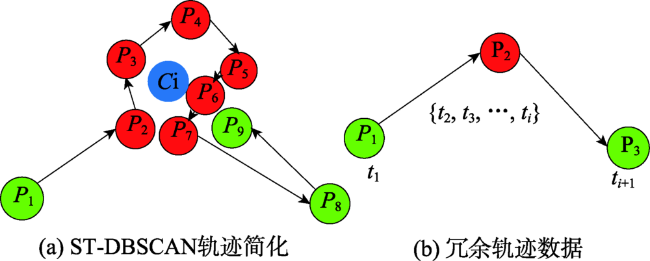
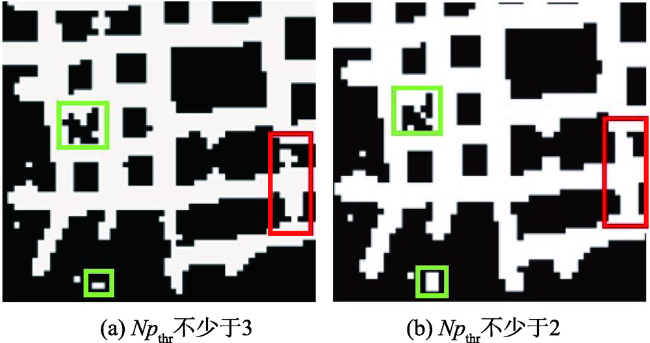
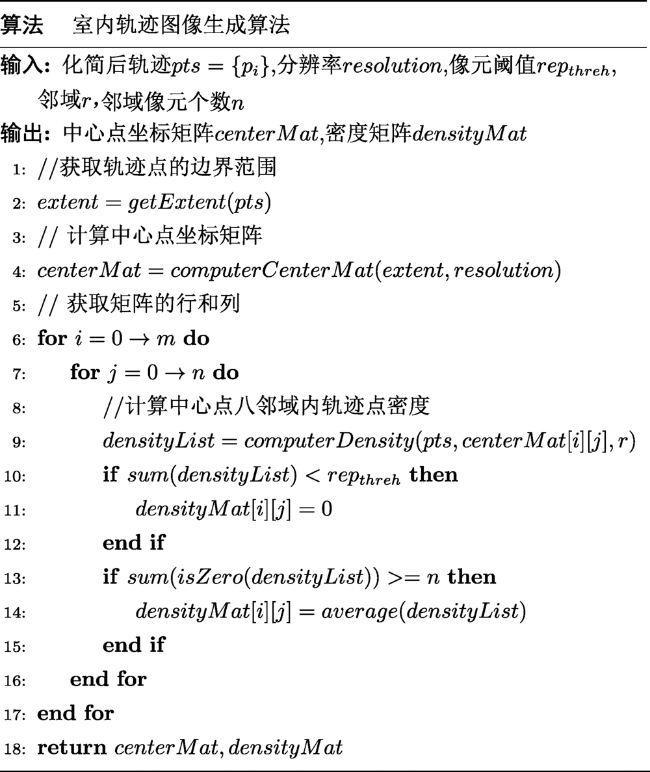
室内导航网络是行人导航、信息推荐和商业分析的基础。传统人工测绘或半自动提取的室内三维导航网络无法满足复杂室内空间结构高频变化需求。随着室内定位技术的不断发展,室内移动对象轨迹数据爆发式增长,为室内导航网络快速构建与变化监测更新提供了可能。本文提出一种基于移动对象轨迹的室内导航网络构建方法,在基于ST-DBSCAN的轨迹简化预处理基础上,提出了室内轨迹自适应栅格化算法,减弱栅格图像分辨率对导航网络提取的影响,有效避免廊道轨迹密度差异造成的导航网络拓扑连通失效,并通过CFSFDP自适应聚类算法自动识别楼层之间连通点,实现室内导航网络的快速构建。实验数据来源于上海图聚智能科技股份有限公司提供的某商城真实的室内移动对象轨迹数据,实验结果表明,与普适栅格化方法相比,本文提出的方法将导航网络构建准确率平均提高2.43%,拓扑正确度提高12.8%。
傅梦颖 , 张恒才 , 王培晓 , 吴升 , 陆锋 . 基于移动对象轨迹的室内导航网络构建方法[J]. 地球信息科学学报, 2019 , 21(5) : 631 -640 . DOI: 10.12082/dqxxkx.2019.190024
The indoor navigation network is the basis for pedestrian navigation, information recommendation, and business analysis. The traditional method of manual mapping or semiautomatic extraction of three-dimensional indoor navigation network cannot meet the requirement of high-frequency change of complex indoor space structures. With the continuous development of indoor positioning technology, there is an explosion of trajectory data of indoor moving objects, which provides a possibility for rapid construction and change monitoring of indoor navigation networks. This paper proposes a method of crowdsourcing construction of indoor navigation network based on the trajectory of moving objects. Based on trajectory simplification preprocessing using ST-DBSCAN, an indoor trajectory adaptive rasterization algorithm is proposed to reduce the influence of raster image resolution on the extraction of navigation networks. This approach effectively avoids the failure of navigation networks' topological connection that is caused by the difference of track trajectory density. Moreover, it automatically identifies the connection points between floors by the CFSFDP adaptive clustering algorithm to realize the rapid construction of indoor navigation networks. The experimental data is derived from the real indoor moving object trajectory data provided by Shanghai Palmap Science & Technology Co., Ltd. The experimental results show that, compared with the universal rasterization method, the proposed method improves the accuracy of navigation network construction by an average of 2.43% and improves the accuracy of topology by 12.8%.
Fig. 1 Method for constructing indoor navigation networks based on moving object trajectory图1 基于移动对象轨迹的室内导航网络构建方法 |
Fig. 2 Indoor trajectory preprocessing图2 室内轨迹预处理 |
Fig. 3 Adaptive rasterization results under different thresholds图3 不同阈值下的自适应栅格化结果 |
Fig. 4 Algorithmfor generating indoor trajectory images图4 室内轨迹图像生成算法 |
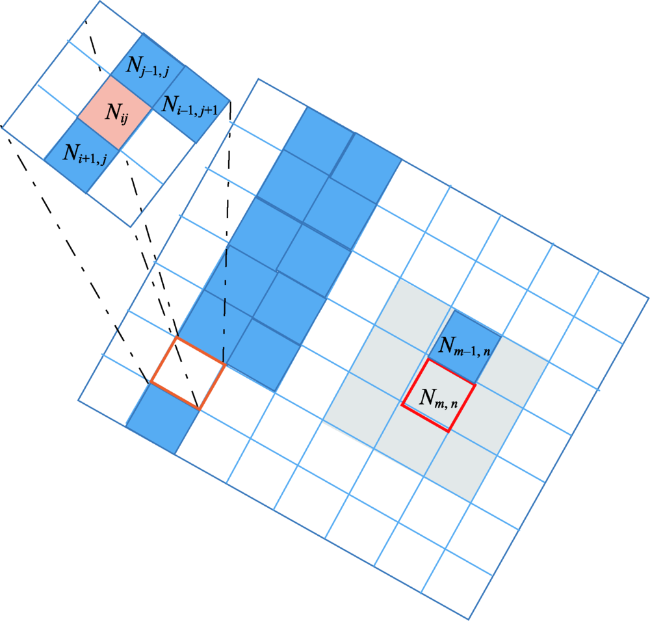
Fig. 5 Schematic diagram of the adaptive rasterization algorithm图5 自适应栅格化算法示意 |
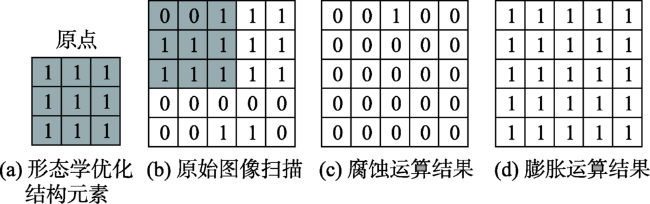
Fig. 6 Morphological optimization processes图6 形态学优化过程 |
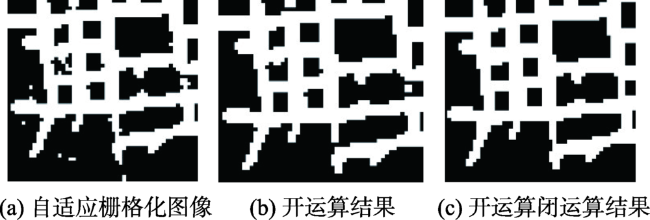
Fig. 7 Optimization of indoor trajectory images图7 室内轨迹图像优化 |
Fig. 8 Sequences of structural elements used in morphological refinement图8 形态学细化采用的结构元素序列 |
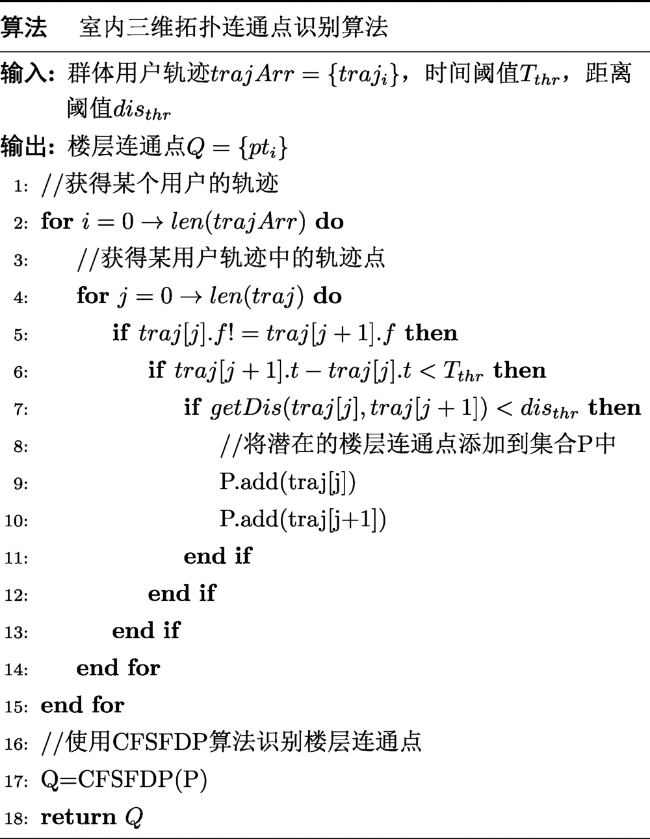
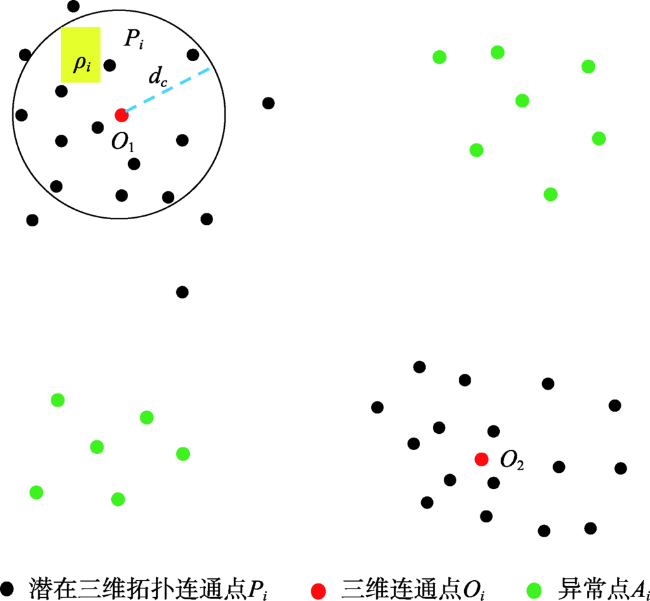
Fig. 9 Algorithm for identifying3-D "indoortypological connections图9 室内三维拓扑连通点识别算法 |
Fig. 10 Identification of 3-D topological connections图10 三维拓扑连通点识别 |
Tab. 1 Samples of user records表1 移动用户轨迹实例 |
| mac | Time | x | y | Floor |
|---|---|---|---|---|
| 000C437*** | 2017/11/910:00:01 | 135946*** | 45097*** | 1 |
| 000C437*** | 2017/11/910:00:03 | 135946*** | 45097*** | 1 |
| 000C437*** | 2017/11/910:00:04 | 135946*** | 45097*** | 1 |
| …… | …… | …… | …… | …… |
| 000C437*** | 2017/11/912:20:44 | 135946*** | 45097*** | 2 |
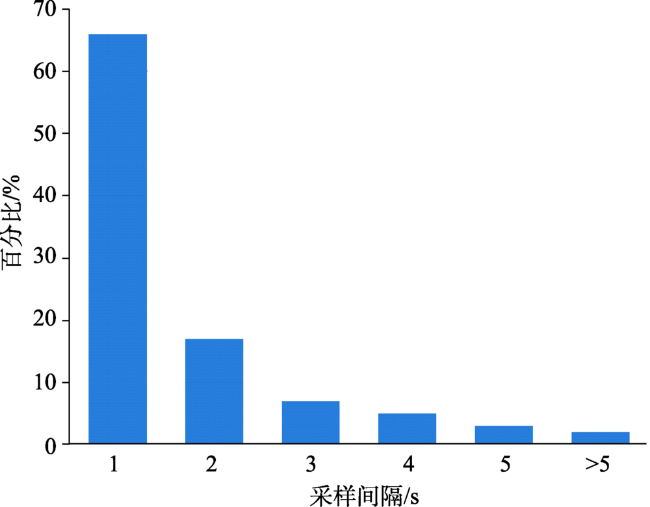
Fig. 11 Sampling interval of trajectory data of moving objects in a shopping mall图11 某商城移动对象轨迹数据采样间隔 |
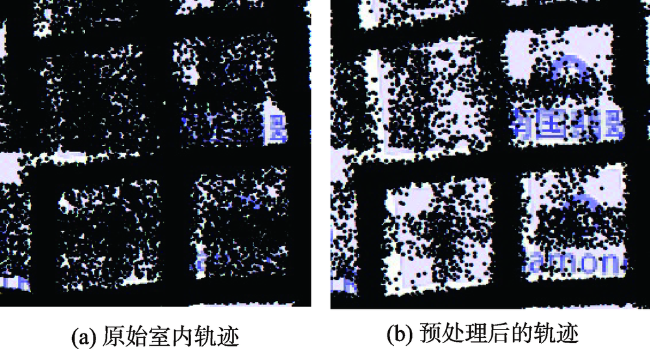
Fig. 12 Pretreatment results of indoor trajectory图12 室内轨迹预处理结果 |
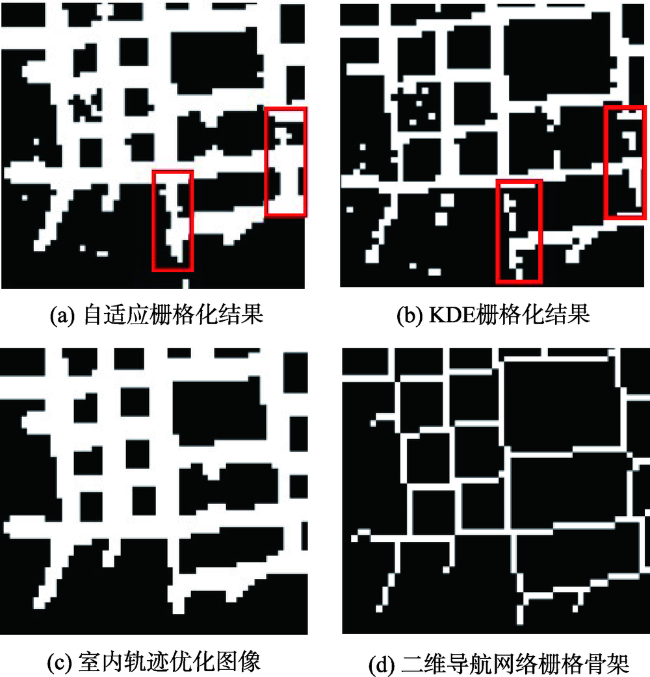
Fig. 13 Processes of extracting a 2-Dindoor navigation network图13 室内二维导航网络提取过程 |
Fig. 14 Extraction resultof a 2-Dindoor navigation network图14 室内二维导航网络提取结果 |
Tab. 2 Evaluation of the experiment result (%)表2 实验结果评价 |
| 导航网络缓冲区 | 拓扑 正确性 | ||||||
|---|---|---|---|---|---|---|---|
| P(0.2 m) | R(0.2 m) | P(0.5 m) | R(0.5 m) | P(0.7 m) | R(0.7 m) | ||
| 核密度估计法 | 27 | 24.8 | 61 | 56.1 | 77.8 | 71.6 | 76.7 |
| 本文方法 | 28.2 | 25.7 | 64.4 | 58.7 | 80.5 | 73.3 | 89.5 |
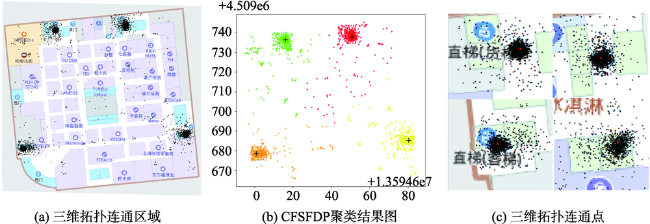
Fig. 15 Identification of floor connections, and clustering result图15 楼层连通点识别及聚类结果 |
Fig. 16 Extraction result of a 3-D indoor navigation network图16 室内三维导航网络提取结果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}