
中国无人机遥感技术突破与产业发展综述
作者简介:晏 磊(1956-),男,湖北武汉人,教授,研究方向为高分辨率成像与遥感定标。E-mail: lyan@pku.edu.cn
收稿日期: 2018-11-16
要求修回日期: 2018-12-28
网络出版日期: 2019-04-24
基金资助
国家重点研发计划项目(2017YFB0503003、2017YFB0503004)
国家“863”计划重点项目(2013AA122100、2008AA121800)
国家科技支撑计划项目(2011BAH12B00)
国家发改委发改办高技([2005]1534)
科技部科技型中小企业创新基金(02C26215200750)
The Impact of UAV Remote Sensing Technology on the Industrial Development of China: A Review
Received date: 2018-11-16
Request revised date: 2018-12-28
Online published: 2019-04-24
Supported by
National Key Research and Development Program of China, No.2017YFB0503003, 2017YFB0503004
National High-tech R&D Program of China (863 Program), No.2013AA122100, 2008AA121800
National Key Technology Research and Development Program of the Ministry of Sciences and Technology of China, No.2011BAH12B00
National Development and Reform Commission (NDRC) Development and Reform of High-tech Enterprises, No.[2005]1534
Ministry of Science and Technology Innovation Fund for Small and Medium-sized Technological Enterprises, No.02C26215200750
Copyright
无人机是未来网络环境下一种数据驱动的空中移动智能体,而无人机遥感则是无人机应用最重要的引领性产业。本文首先以国内外无人机遥感发展现状为背景,重点概述了中国无人机遥感21世纪以来“十五”到“十三五”所获得的具有代表性的国家支持与推动的发展历程,阐述了无人机遥感定标场,航空航天定标场的建立以及应用验证,包括无人机遥感系统的载荷与系统技术发展;然后,进一步阐述了以遥感定标场、地物参量引导载荷性能、系统模型为代表的中国无人机遥感的相关技术跨越;接着,概略介绍了无人机遥感在国防反恐安全以及跨国应急救援,国土测绘与海洋岛礁测绘应用,地质灾害应用以及国家应急救援等领域的产业应用;最后,介绍了中国在无人航空遥感领域展开的跨越性的工作,包括组网智能控制、精度和实时性度量基础、载荷平台自组织冗余容错、遥感大数据云处理技术和无人机遥感组网实用化等内容。未来无人机遥感发展的总体目标是建立起具备迅捷信息获取能力的无人航空器组网观测系统,实现无人航空器组网技术由项目层面跨越到遥感领域,同时也为中国成为世界遥感强国的国家战略跨越奠定基础。
晏磊 , 廖小罕 , 周成虎 , 樊邦奎 , 龚健雅 , 崔鹏 , 郑玉权 , 谭翔 . 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报, 2019 , 21(4) : 476 -495 . DOI: 10.12082/dqxxkx.2019.180589
The drone is a data-driven air mobile agent in the future network environment, UAV remote sensing technology has become one of the leading industries for UAV applications. This paper introduces the development of UAV remote sensing technology within China and internationally, and there is a particular focus on the development of UAV remote sensing technology within China from the "10th Five-Year Plan" to the "13th Five-Year Plan" since the 21st century. It also focuses on the UAV remote sensing calibration field, the establishment of aerospace calibration field and application verification are also described, including the development of load and system technology of UAV remote sensing system. Secondly, it will introduce the industrial application of UAV remote sensing technology in the fields of national defense, land and ocean island reef mapping, geological disaster monitoring, and emergency rescue. At last, China's advancement in UAV remote sensing technology with regards to intelligent control of networking, accuracy and real-time metric basis, self-organizing redundant fault tolerance of load platform, remote sensing big data cloud processing technology, and the practical application of UAV remote sensing networking will also be discussed. The overall goal of the future development of UAV remote sensing is to establish an unmanned aircraft network observation system with rapid information acquisition capability, to realize the unmanned aircraft networking technology from the project level to the remote sensing industry. At the same time, it also lays a foundation for Chinese national strategic leap in becoming a strong power in remote sensing field.
Fig. 1 First flight ceremony of a multi-functional on Aug.8, 2005图1 2005年8月8日多功能无人机遥感系统首飞仪式 |
Fig. 2 First flight of a multi-function UAV remote sensing system图2 多功能无人机遥感系统首飞现场 |
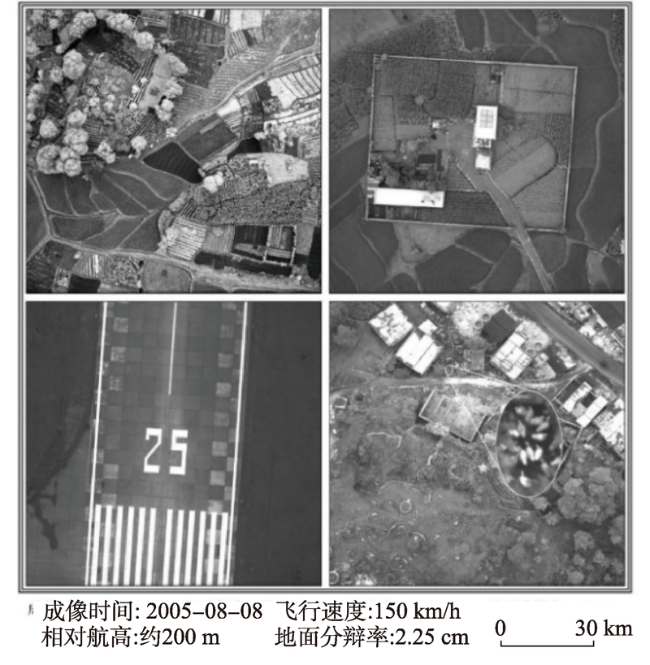
Fig. 3 The UAV remote sensing image of the first flight (resolution of 2.25 cm)图3 分辨率2.25 cm的无人机航空遥感首飞遥感影像 |
Tab. 1 Key projects of earth observation and navigation within the national R&D program from 2016 to 2018 (个)表1 2016-2018年国家重点研发计划“地球观测与导航”重点专项项目统计 |
| 2016年 | 2017年 | 2018年 | |
|---|---|---|---|
| 项目总数 | 26 | 16 | 13 |
| 直接与无人机相关项目数 | 3 | 3 | 1 |
| 间接与无人机相关项目数 | 1 | 2 | 1 |
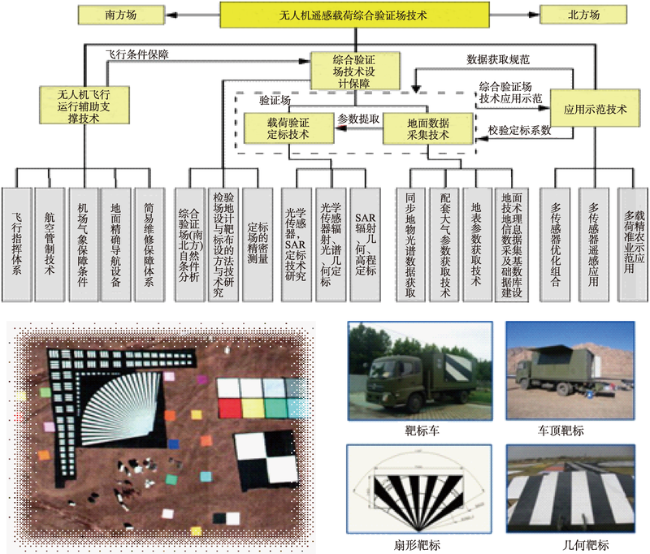
Fig. 4 UAV calibration field design, use, and various target schematics图4 无人机定标场设计、使用及各种靶标示意 |
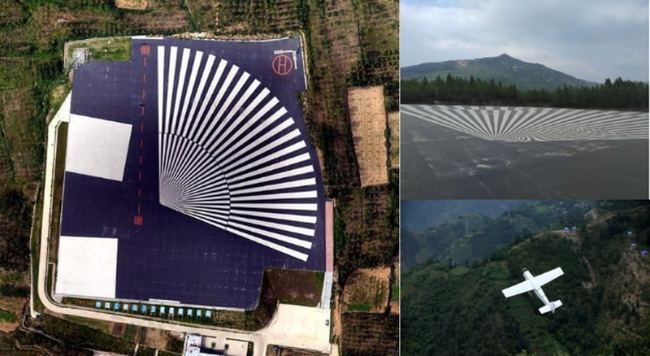
Fig. 5 Songshan calibration field图5 嵩山定标场 |
Fig. 6 Calibration of surface parameters and development of photoelectric parameters of partial remote sensing loading图6 经地表参数校标并完善光电参量的部分遥感载荷 |
Tab. 2 UAV remote sensing flight verification results表2 无人机遥感系统飞行验证结果 |
| 试验飞行条件 | 设备系统制作前 | 设备系统制作后 | 产业化效能 | |
|---|---|---|---|---|
| 安全性 | 风险很大 | 有风险 | 安全可靠性数量级提升 | |
| 科学 合理性 | 飞行次数 | 几十次 | 十几次 | 飞行次数减少5~10倍 |
| 保障人员 | 上百人 | 30人以下 | 参与人员减少5倍 | |
| 延续时间 | 1~2年 | 2月以内 | 时间减少5~10倍 | |
| 性能指标 | 缺乏量化验证依据,性能通过飞行改进 | 指标量化、明确,性能通过地面实验改进 | 指标改进有依据,性能显著提高 | |
| 经济性 | 飞行实验成本为产品的1/4~1/3 | 飞行试验成本降低80% | 产品成本降低20%以上 | |
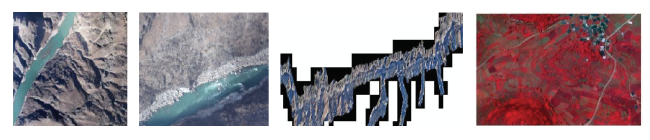
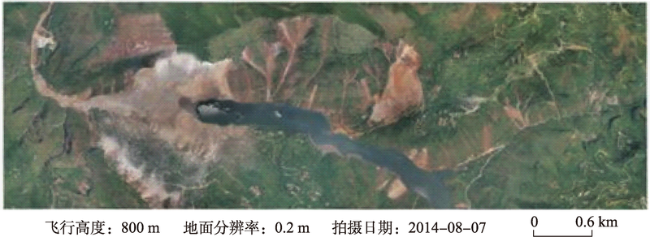
Fig. 7 Jinsha river canyon image and hyperspectral aerial survey image图7 金沙江峡谷影像以及高光谱航测影像(“863”专项成果) |
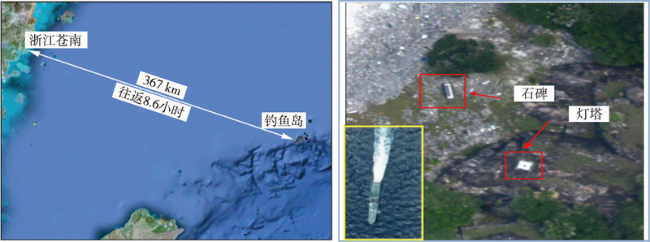
Fig. 8 Diaoyu islands drone monitoring flight route and image results图8 钓鱼岛无人机监测飞行路线与影像成果 |
Fig. 9 Signing of a strategic cooperation agreement between the Armed Police Force and the National Remote Sensing Center and the joint construction of the armed police calibration field图9 武警部队与国家遥感中心签署战略合作协议及武警定标场 |
Fig. 10 Remote sensing image of UAV after the Ludian earthquake near the Niulanjiang River图10 鲁甸地震牛栏江堰塞湖震后无人机遥感影像 |
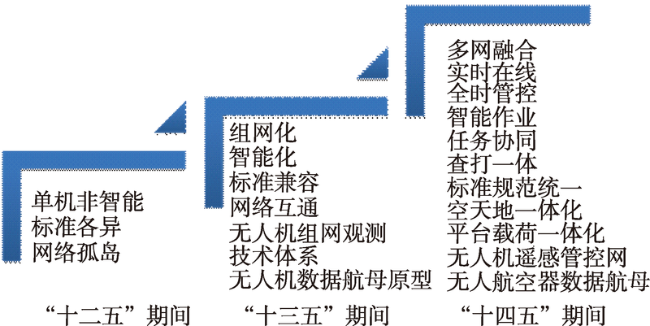
Fig. 11 Development trend of the unmanned aircraft remote sensing system network图11 无人航空器遥感系统组网智能化发展趋势 |
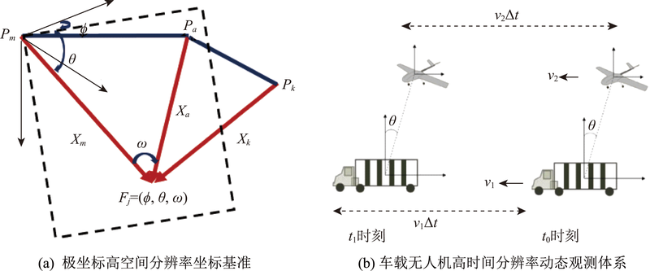
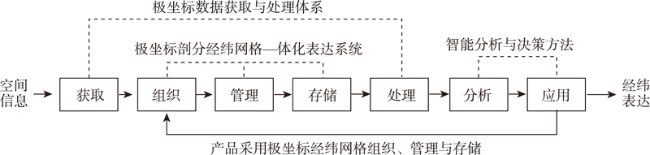
Fig. 12 UAV remote sensing polar coordinates and spatial resolution observation and measurement system图12 无人机遥感极坐标高时空分辨率观测度量体系 |
Fig. 13 UAV high-resolution remote sensing spatial information chain图13 无人机高分遥感空间信息链 |
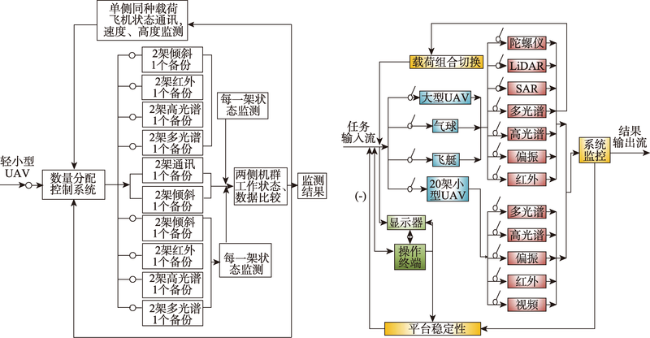
Fig. 14 Redundant fault-tolerant earth observation system of UAV group and the redundant fault tolerant system with multiple sensor components图14 无人机群组冗余容错对地观测系统以及多传感器件的冗余容错系统 |
Fig. 15 Zhongtian skynet unmanned aircraft resource scheduling and remote sensing observation and control network platform图15 中科天网无人航空器资源调度与组网遥感观测管控平台 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
[
|
| [22] |
|
| [23] |
[
|
| [24] |
[
|
| [25] |
|
| [26] |
[
|
| [27] |
[
|
| [28] |
[
|
| [29] |
[
|
| [30] |
[
|
| [31] |
[
|
| [32] |
[
|
| [33] |
|
| [34] |
[
|
| [35] |
[
|
| [36] |
[
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
[
|
| [41] |
[
|
| [42] |
|
| [43] |
[
|
| [44] |
[
|
| [45] |
[
|
| [46] |
[
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
[
|
| [52] |
|
| [53] |
[
|
| [54] |
[
|
| [55] |
[
|
| [56] |
[
|
| [57] |
|
| [58] |
[
|
| [59] |
[
|
| [60] |
[
|
| [61] |
[
|
| [62] |
[
|
| [63] |
[
|
| [64] |
|
| [65] |
|
| [66] |
[
|
| [67] |
[
|
| [68] |
[
|
| [69] |
[
|
| [70] |
[
|
| [71] |
[
|
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}