
中国浮空器遥感遥测应用现状与展望
作者简介:彭桂林(1979-),男,江西宜春人,博士,研究员,主要从事浮空器综合信息系统研究。E-mail: bsipeng@126.com
收稿日期: 2018-08-24
要求修回日期: 2019-03-05
网络出版日期: 2019-04-24
基金资助
国家重点研发计划项目(2017YFB0503002)
The Present Situation and Prospect of Aerostat Applied to Remote Sensing and Remote Survey in China
Received date: 2018-08-24
Request revised date: 2019-03-05
Online published: 2019-04-24
Supported by
National Key Research and Development Program of China, No.2017YFB0503500
Copyright
浮空器是一种新型的航空遥感遥测平台,适合于中小面积高分辨率的遥感遥测,尤其是中低空小型遥控飞艇,可依靠动力推进与操纵系统实现可操作飞行,具有飞行时间长、覆盖面积大、载重能力强、效费比高等特点,与其他几种航空平台相比,飞艇平台具有综合优势,在基础地理数据采集、国土资源勘查、环境监测、农业植被监测等各个领域具有广泛的应用前景。本文分析了中国有人飞机、无人机和中低空飞艇、平流层飞艇平台在遥感遥测中应用案例,以及各个航空平台的性能特点、工作方式、技术难点等,对比了各种平台的技术特点;探讨了中小型遥控飞艇平台在遥感遥测中应用的优势,研究了平流层飞艇的发展现状与关键技术;并结合国际相关领域的研究进展,对未来浮空器遥感应用的前景进行了展望。
彭桂林 , 万志强 . 中国浮空器遥感遥测应用现状与展望[J]. 地球信息科学学报, 2019 , 21(4) : 504 -511 . DOI: 10.12082/dqxxkx.2019.180390
The aerostat is a new airborne remote sensing platform, which is suitable for high resolution remote sensing in a small and medium area. The floating aircraft, especially the medium and low altitude small remote control airship, can be supported by the power propulsion and control system to implement the maneuvering flight. It has the characteristics of long flight time, large coverage area, strong load capacity, and high cost-efficiency. Satellite remote sensing data that lacks high spatial resolution and timeliness is of limited ability to access remote environment at a micro scale. Rotary or fixed-wing unmanned aerial vehicle (UAV) platforms, which is capable of performing unmanned inspection, surveillance, reconnaissance, and mapping of inimical areas with amateur or SLR digital cameras, can fly with manual, semi-automated, and autonomous modes. It is well known that recently UAVs in the geomatics field became a common platform for data acquisition, but the platforms have a low payload capacity and its flight was too short to be a valid complementary solution to data acquisitions. Compared with several other aviation platforms, the airship platform has a comprehensive advantage, which meets the comprehensive urgent needs and precision large scale mapping requirement for the areas with complex terrains. It has a wide application prospect in various fields, such as basic geographic data collection, land resources exploration, environmental monitoring, and agricultural vegetation monitoring. As its height superiority,the airship can effectively overcome the influence of earth curvature and the environment which helps to enhance the detection performance. Near space aircraft is the fundamental infrastructure platform in breaking down the natural barriers between the aviation region and the outer space. The stratosphere airship, which is one of the quasi-static aircrafts within the near space, has unique platform advantages. It is equipped with laser scanner, VIS camera (one for vertical capturing or more for slope capturing), thermo camera, and INS/GPS as an exterior orientation (pose) determination in undertaking tasks of aviation thermometric mapping and environmental studies. This objectives of this paper are (1) to analyze the application cases of the remote sensing telemetry of China's human aircraft, UAV, middle and low altitude airship and stratospheric airship platform; (2) to analyze the performance characteristics, working methods, and technical difficulties of each aviation platform; (3) to compare the technical features of various platforms; (4) to discusse the advantages of the application of the small and medium remote control airship platform in remote sensing telemetry, and (5) to explore the development status and key technology of the stratospheric airship. In the end, the future application of the remote aerostat is prospected in the light of the research progress in the international related fields.
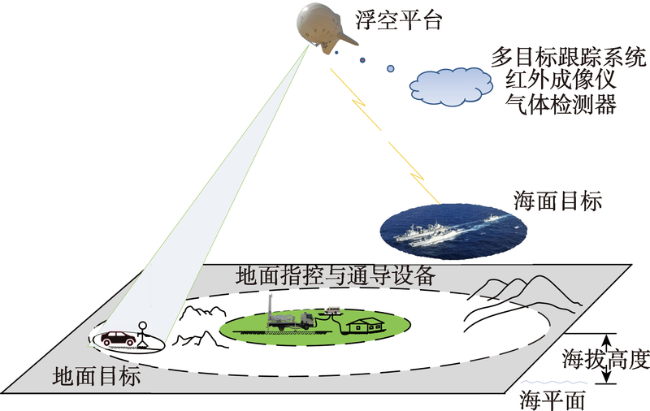
Fig. 1 Typical application scenario of a floating aerostat图1 浮空器典型应用场景 |
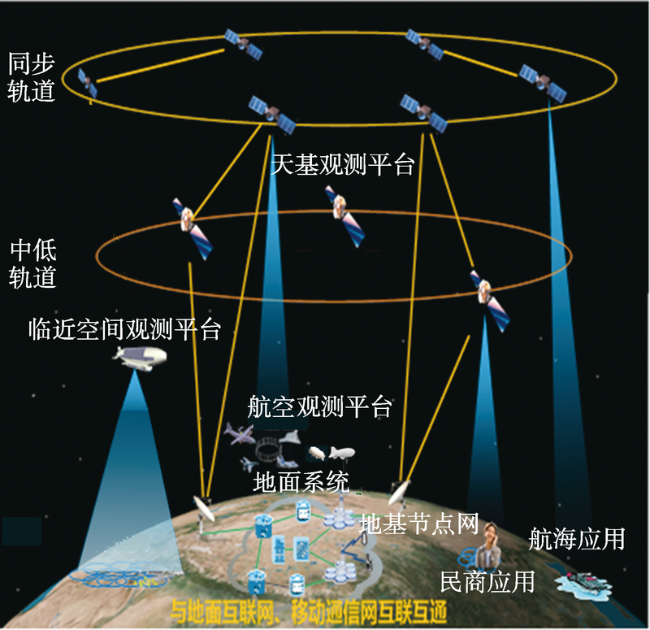
Fig. 2 Various kinds of remote sensing platforms图2 各类遥感平台 |
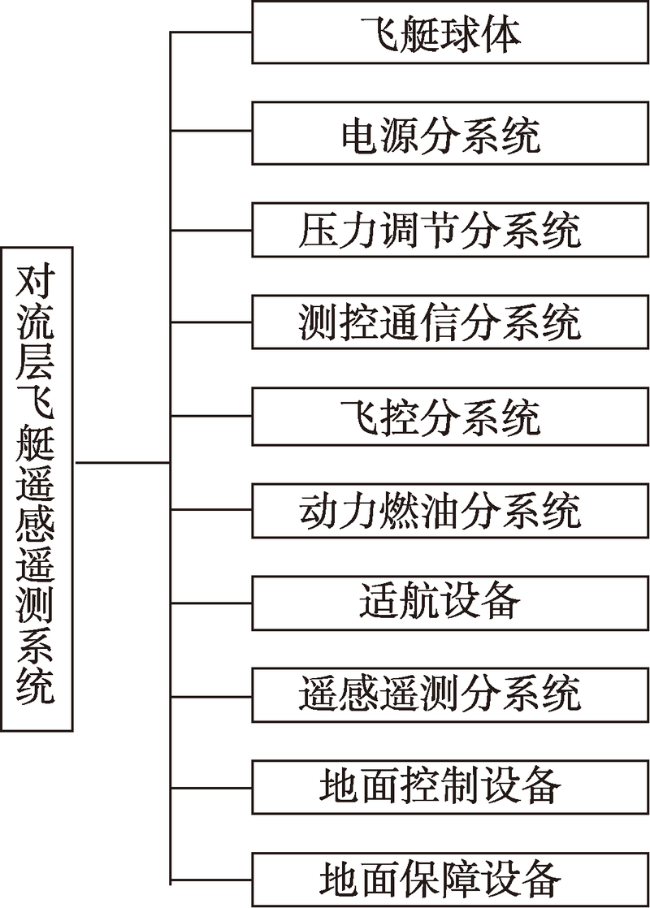
Fig. 3 Composition of tropospheric airship remote sensing system图3 对流层飞艇遥感遥测系统组成 |
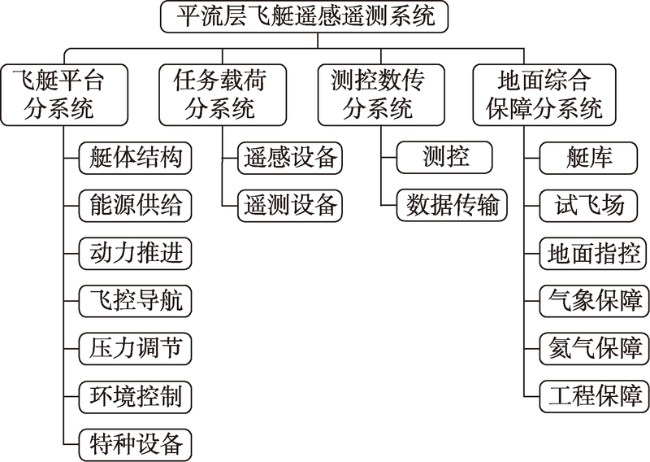
Fig. 4 Composition of stratospheric airship remote sensing system图4 平流层飞艇遥感遥测系统组成 |
Tab. 1 The performance parameters of unmanned airship platform work表1 无人飞艇平台性能参数 |
| 指标名称 | FKC-1飞艇 | 华南理工飞艇 | 38所飞艇 |
|---|---|---|---|
| 艇体体积/m3 | 180 | 120 | 300 |
| 任务载重能力/kg | 不小于15 | 不小于10 | 不小于50 |
| 控制飞行半径/km | 1 | 10 | 20 |
| 最大升限/m | 2000 | 1500 | 3000 |
| 巡航时间/h | 不小于2 | 不小于3 | 不小于3 |
| 巡航速度/(km/h) | 40 | 20~60 | 50~70 |
Fig. 5 Schematic diagram of the 38th research institute unmanned airship platform work图5 38所飞艇平台工作示意 |
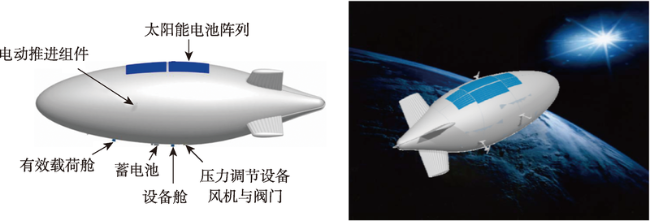
Fig. 6 Overall layout of the stratospheric airship图6 平流层飞艇总体布局 |
Tab. 2 Development of stratospheric airships around the world表2 世界各国平流层飞艇发展情况 |
| 项目名称 | 国家/部门 | 主要用途 | 进展情况 |
|---|---|---|---|
| HAA高空飞艇 | 美国导弹防御局,后转移到海军空间与导弹防御司令部 | 导弹预警 | 2003年开始论证,仍处于样机研制阶段 |
| “高空哨兵”飞艇 | SwRI研究所 | 高空监视、通信中继 | 2005年11月进行飞行试验,飞行高度达22 km,留空时间达5 h |
| ISIS项目 | 美国国防高级计划研究局(DARPA) | 预警、通信等 | 正在进行缩比尺寸验证艇的研制 |
| 平流层卫星 | Sanswire Networks公司 | 军事/民用通信 | 2005年5月,Sanswire Networks宣称已经按预定计划完成军用飞艇原型的演示验证 |
| JPaerospace公司系列飞艇 | 美国空军天战实验室/JP公司 | 高空侦察监视、 中继通信 | “攀登者”高空飞艇:进行了部分低空试验,准备进行高空试验时被损毁。 “天腾”飞艇:飞行高度达28 981 m,(95,085 ft)打破了由美军“高空哨兵”保持的22 555 m记录 |
| HALE平流层飞艇 | 欧洲航空局 | 对地观测、通信中继 | 处于概念设计阶段 |
| 日本平流层飞艇 | 日本航空航天技术研究所 | 对地观测、通信中继 | 2003年8月,发射了一艘无动力平流层试验艇,升空高度达16.4 km,现处于关键技术攻关阶段 |
Tab. 3 Performance comparison of various aerial remote sensing platforms表3 各种航空遥感遥测平台性能对比 |
| 遥感平台 | 有人飞机 | 固定翼无人机 | 旋翼无人机 | 中低空飞艇 | 平流层飞艇 |
|---|---|---|---|---|---|
| 载重能力 | 大 | 较大 | 较小 | 大 | 大 |
| 飞行高度 | 高 | 低 | 低 | 低 | 高 |
| 飞行速度 | 快 | 较快 | 慢 | 较慢 | 较慢 |
| 操纵简便性 | 难 | 一般 | 简单 | 一般 | 一般 |
| 垂直/重复起降 | 一般 | 较差 | 优良 | 优良 | 优良 |
| 定点运行能力 | 差 | 差 | 优良 | 优良 | 优良 |
| 驻空时间 | 一般 | 短 | 较短 | 长 | 长 |
| 抗风能力 | 强 | 强 | 一般 | 强 | 一般 |
| 技术成熟度 | 高 | 高 | 高 | 高 | 低 |
| 使用成本 | 高 | 低 | 低 | 较低 | 较低 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
|
| [4] |
[
|
| [5] |
|
| [6] |
[
|
| [7] |
|
| [8] |
新舟60遥感飞机首飞,航空遥感用的飞机不再姓“美”[EB/OL]..
[Xinzhou 60 is the first remote sensing aircraft to fly, aircraft used in aerial remote sensing is no longer named "USA" [EB/OL]. ]
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
[
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
|
| [21] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}