
基于滑模和ESO的四旋翼飞行器遥感机动观测姿态控制
作者简介:龙诗科(1991-),男,湖南衡阳人,硕士,助教,主要从事无人机智能控制、遥感图像处理等研究。 E-mail:longshike2010@163.com
收稿日期: 2018-10-09
要求修回日期: 2019-03-12
网络出版日期: 2019-04-24
基金资助
广西科技重大专项(桂科AA17204086)
国家自然科学基金项目(61841101)
广西自然科学基金重点项目 (2016GXNSFDA380031)
国家重点研发计划项目(2017YFB0503004-4)
Remote Sensing Maneuvering Observation Attitude Control of Quadrotor Aircraft based on Sliding-mode and ESO
Received date: 2018-10-09
Request revised date: 2019-03-12
Online published: 2019-04-24
Supported by
Key Science and Technology Project of Guangxi, No.AA17204086
National Natural Science Foundation of China, No.61841101
Key National Natural Science Foundation of Guangxi, No.2016GXNSFDA380031
National Key Research and Development Plan, No.2017YFB0503004-4
Copyright
随着无人机(UAV)在民用各个行业应用领域的推广,对精准遥感的需求越来越强烈。旋翼飞行器作为无人机的一种,近年来发展迅速,已成为小范围精准遥感测绘的首选,然而其本身飞行的稳定性与遥感成像效果有着直接联系,因此姿态控制器也成为无人机稳定性能研究的基础问题。针对四旋翼飞行器运动的欠驱动、强耦合和非线性特性,本文提出一种基于滑模和扩张状态观测器(ESO)的姿态控制器,设计了可一系列实验方法来获取模型参数(转动惯量、升力系数、扭矩系数和电机时间常数),并建立四旋翼各个模块的数学模型。在此模型基础上,采用滑模控制器实现四旋翼飞行器姿态解耦鲁棒控制,通过sat函数替换符号函数改进滑模控制器结构,减缓颤振现象。同时,结合ESO实现对四旋翼姿态回路的系统干扰总和进行实时估计,其中干扰总和包括建模状态间耦合项、未建模动态以及外部干扰,从而对滑模控制器的输出进行实时干扰补偿,实现高品质的四旋翼姿态控制。本文设计2组实验:实际操纵指令跟踪实验;外界实际挂载重物干扰实验。通过实验对这2种四旋翼无人机姿态控制器(基于滑模和ESO的控制器、单独滑模控制器)进行仿真和实际试飞对比。实验结果表明,同等情况下,基于滑模和ESO的控制器能够实现姿态稳定且跟踪误差减少约20%,同时该控制方法增强了四旋翼的抗干扰能力,悬停时姿态角度波动幅度减少约50%,具有实际应用的价值。
龙诗科 , 孙山林 , 赵海盟 . 基于滑模和ESO的四旋翼飞行器遥感机动观测姿态控制[J]. 地球信息科学学报, 2019 , 21(4) : 532 -541 . DOI: 10.12082/dqxxkx.2019.180503
With the promotion of UAVs in the application fields of various industries, especially in remote sensing, the demand for precision remote sensing is becoming more and more intense. As a kind of UAV, quad-rotor has developed rapidly in recent years and has become the first choice for small-scale accurate remote sensing mapping. However, its own flight stability is directly related to the remote sensing imaging effect, and the attitude controller therefore becomes the basic problem of the research on the stability of UAVs. For the under-actuated,strong coupling and nonlinear characteristics of quad-rotor aircraft movement, a method of attitude controller based on sliding mode and extended state observer (ESO) was presented. A series of experiments methods were designed to obtain the model parameters: inertia, lift coefficient, torque coefficient and time constant of the motor, and establish a mathematical model of each module of the four rotors. The sliding mode controller was used to achieve quad-rotor aircraft attitude decoupling robust control, the symbol function was replaced by sat function to improve sliding mode controller structure and slow down flutter phenomenon. Combined with extended state observer (ESO), the sum of quad-rotor attitude loop system interference can be estimated at real-time. The sum of interference includes states coupling terms, un-modeled dynamics and external disturbances. Thus the disturbance compensation was added into sliding mode control output in real-time to achieve high quality quad-rotor attitude control. Two sets of experiments were designed. One set of experiments was the actual manipulation command tracking experiment, and the other set was the actual external load interference experiment. The two quad-rotor UAV attitude controllers (sliding mode controller based ESO&individual sliding mode controller) are compared with the simulation and the actual test flight based on experiments. The experimental results show that, under the same conditions, the controller based on sliding mode and extended state observer (ESO) can achieve stable attitude control and reduce tracking error by about 20%, and the control method can enhanced the anti-interference ability of the quad-rotor. while quad-rotor hovering, it can reduces the fluctuation of the attitude angle by about 50%, which has practical application value.
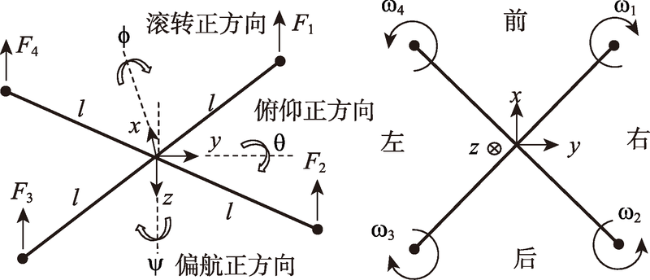
Fig. 1 Four-rotor system structure and force diagram图1 四旋翼系统结构与受力 |
Fig. 2 Quad-rotor structure and flight control hardware board structure图2 四旋翼无人机结构和飞控硬件板 |
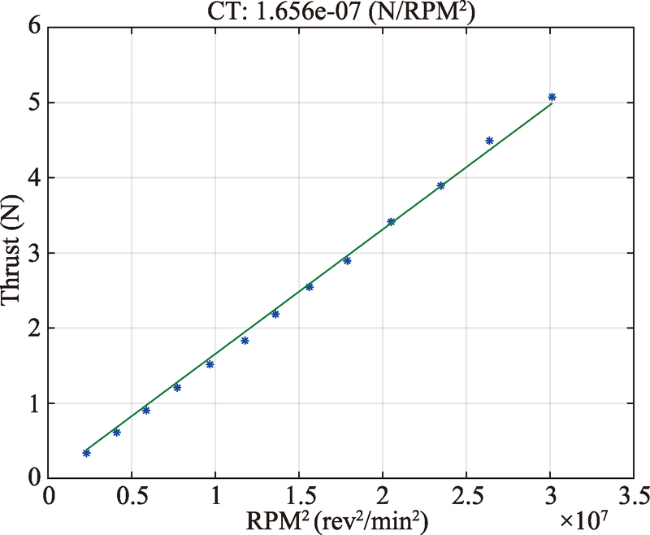
Fig. 3 Asingle propeller thrust coefficient results图3 单个螺旋桨的推力系数结果 |
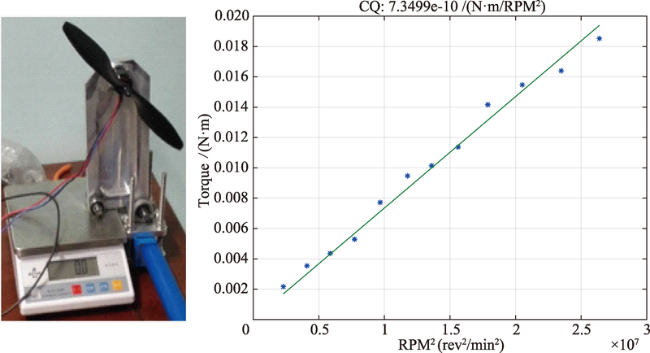
Fig. 4 Motor torque test device and a single propeller torque factor result图4 电机扭矩测试装置与单个螺旋桨的扭矩系数结果 |
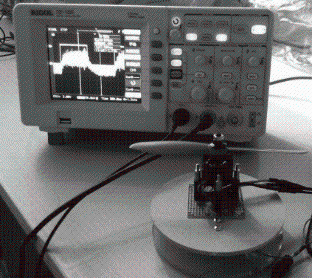
Fig. 5 Motor time constant measuring device图5 电机时间常数测量装置 |
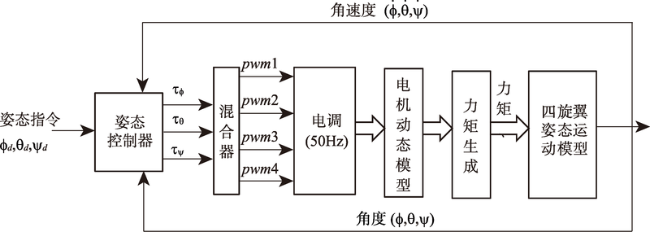
Fig. 6 Four-rotor attitude control architecture图6 四旋翼姿态控制架构 |
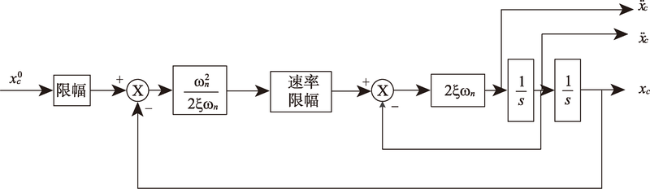
Fig. 7 Second-order low-pass filter structure图7 二阶低通滤波器结构 |
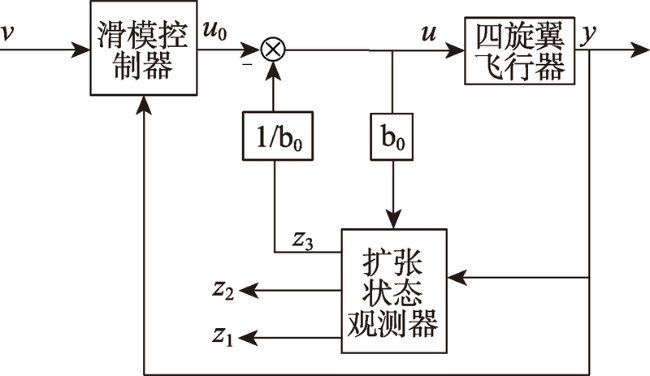
Fig. 8 Sliding mode control combined with ESO structure图8 滑模控制与ESO结合架构 |
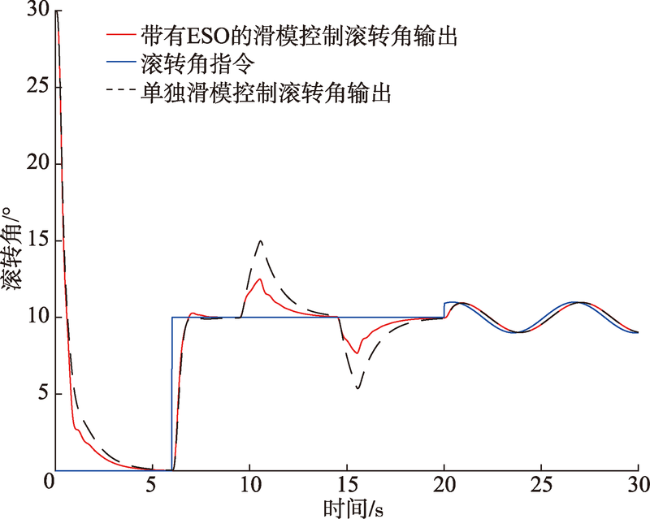
Fig. 9 Comparison of the four-rotor roll angle response curve图9 四旋翼滚转角响应曲线对比 |
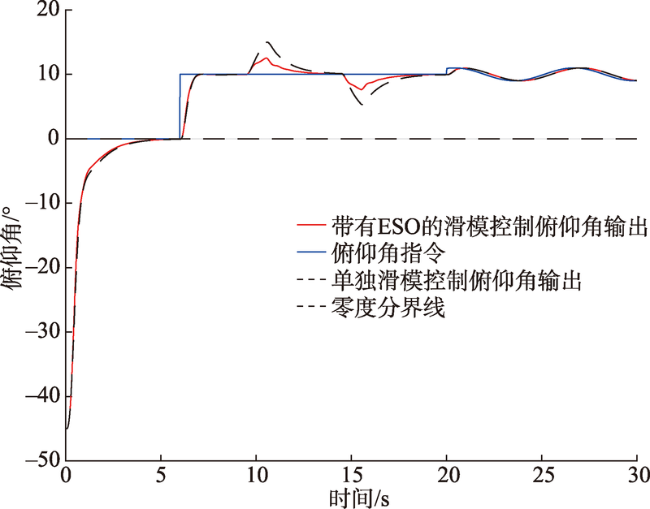
Fig. 10 Comparison of the four-rotor pitch angle response curve图10 四旋翼俯仰角响应曲线对比 |
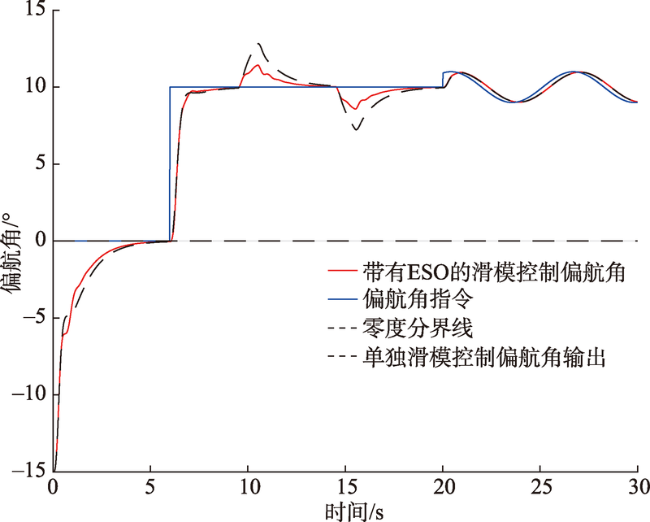
Fig. 11 Comparison of four-rotor yaw angle response curves图11 四旋翼偏航角响应曲线对比 |
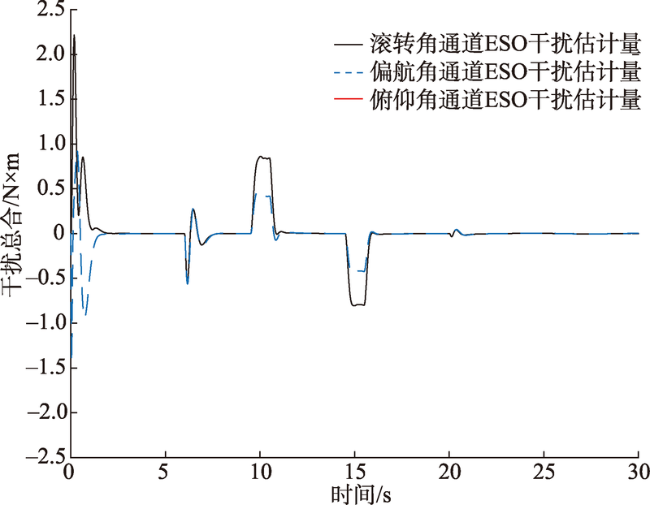
Fig. 12 ESO interference estimator for each loop of the pose图12 姿态各回路ESO干扰估计量 |
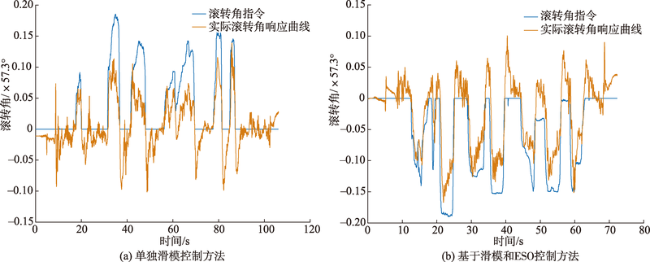
Fig. 13 Comparison of actual roll angles of the two control methods图13 2种控制方法的滚转角实际响应曲线对比 |
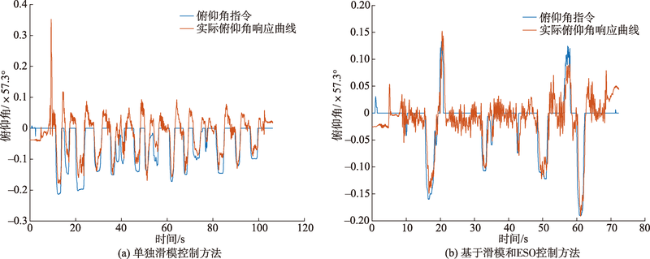
Fig. 14 Comparison of the actual curves of the pitch angles of the two control methods图14 2种控制方法的俯仰角实际响应曲线对比 |
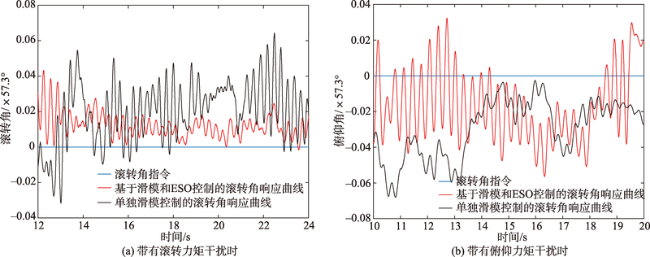
Fig. 15 Comparison of the actual curve of the attitude angles of the two control methods under external disturbance图15 外扰下的2种控制方法姿态角实际曲线对比 |
Tab. 1 Partial data under the condition of rolling torque interference表1 部分滚转力矩干扰情况下的数据 |
| 时间 /s | 滚转角 指令/º | 单独滑模控制 滚转角度值/º | 基于ESO和滑模的 滚转角度值/º |
|---|---|---|---|
| 16 | 0 | 1.146 | 0.573 |
| 17 | 0 | 1.720 | 0.974 |
| 18 | 0 | 2.580 | 0.570 |
| 18.5 | 0 | 0.860 | 0.115 |
| 19 | 0 | 2.408 | 0.572 |
| 20 | 0 | 1.834 | 0.287 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
[
|
| [5] |
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}