
基于改进蚁群算法的无人机低空公共航路构建方法
作者简介:徐晨晨(1991-),女,安徽安庆人,博士生,从事无人机航路规划、无人机遥感等研究。E-mail: xucc.14s@igsnrr.ac.cn
收稿日期: 2018-08-20
要求修回日期: 2019-03-04
网络出版日期: 2019-04-24
基金资助
国家重点研发计划项目(2017YFB0503005)
国家自然科学基金项目(41771388)
Construction of a UAV Low-altitude Public Air Route based on an Improved Ant Colony Algorithm
Received date: 2018-08-20
Request revised date: 2019-03-04
Online published: 2019-04-24
Supported by
National Key Research and Development Program of China, No.2017YFB0503005
National Natural Science Foundation of China, No.41771388
Copyright
日益增加的无人机数量和飞手自由规划航线给航空安全带来极大隐患。构建一个安全、高效的航空飞行环境,可以为无人机活动设立隔离空域,并在隔离空域内规划无人机低空公共航路,以提高低空空域利用率,为无人机交通管理提供决策依据。本研究充分考虑无人机近地表飞行及其即时通讯等特点,以天津市为例,基于地理信息技术构建以多源地理空间数据为基础的无人机低空飞行环境,包括低空蜂窝网络环境、大气环境和政策空域环境等,并改进传统蚁群算法以搜索无人机最优路径,得到该区无人机低空公共航路网。研究结果表明,改进的蚁群算法大大提高了路径搜索效率,满足无人机航路规划的高时效性、动态更新等要求;并且天津市航路长度符合市场上现有的无人机最远航程要求,基本满足现有的无人机运输要求。本研究描述的无人机低空公共航路研究的核心算法和关键技术,可以为无人机管控系统提供核心技术支撑。
徐晨晨 , 廖小罕 , 岳焕印 , 鹿明 , 陈西旺 . 基于改进蚁群算法的无人机低空公共航路构建方法[J]. 地球信息科学学报, 2019 , 21(4) : 570 -579 . DOI: 10.12082/dqxxkx.2019.180392
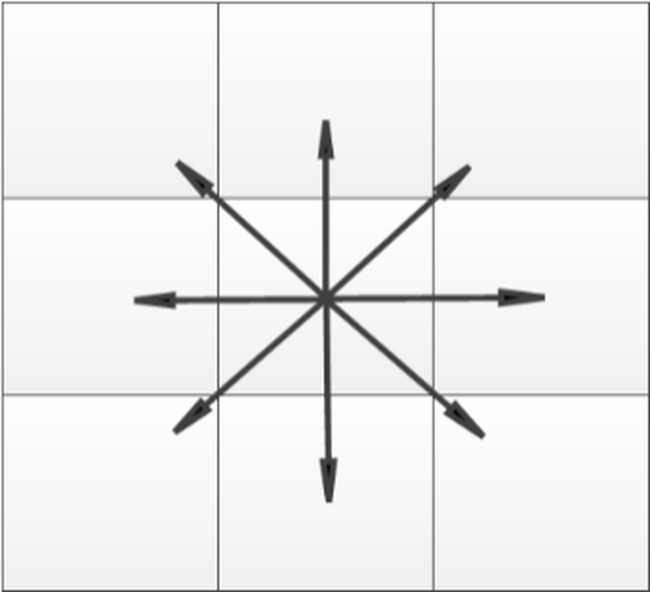
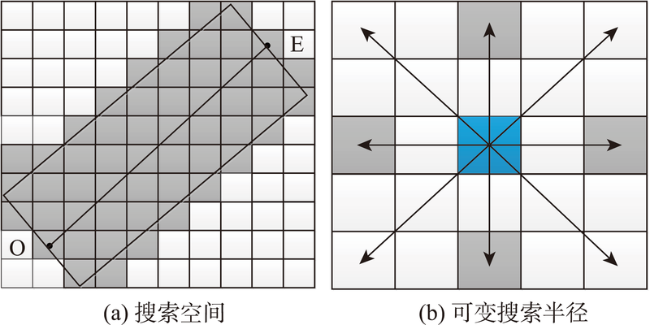
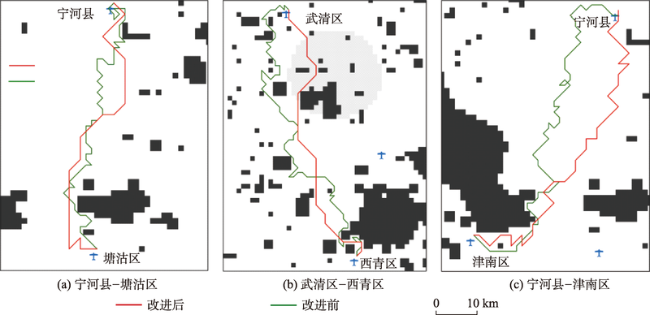
The ever-increasing numbers of UAVs and their free-flying route planning have brought great challenges to national aviation safety. In order to build a safe and efficient aviation flight environment, it is possible to establish an isolated airspace for the UAV activities, and also plan UAV low-altitude public air routes within it. If established, this would increase safe airspace utilization and provide a decision-basis for UAV traffic management. Taking full account of the geographic characteristics of near-surface flight and the near-instant messaging capabilities of UAVs, this study built a low-altitude flight environment for UAVs in Tianjin, China based on multi-source geospatial data using geographic information technologies, and constructed a low-altitude public air route network using an improved Ant Colony Optimization (ACO) algorithm. The study had five major components. Firstly, we developed a path-searching model by improving the traditional ACO algorithm from search space and local target selection. The improved algorithm can be used to search paths in eight directions along a line between the start and end points in order to shorten the search time, and the search radium was determined by an obstacles ratio. Then, local target selection was optimized by introducing evaluation function of A* algorithm and random roulette method. Secondly, we compared the calculating efficiency and path length between the traditional algorithm and the improved one, and found that the improved algorithm was three times more efficient and shorter than the traditional one. Thirdly, the low-altitude flight environment for UAVs included a cellular network, and climatological condition and airspace-policy can be taken into account. The cellular network environment was determined by the distribution of mobile communication base stations and signal attenuation principles. Climatological conditions included wind shear, thunderstorms, glaciation, and low-visibility weather events, and all of which have a significant impact on UAV flight safety. The airspace-policy factors included populated areas, key buildings, and civil airport clearances. Fourthly, we constructed a digital low-altitude airspace by establishing UAV flight principles within air routes and quantifying a grid cost for each kind of constraint. Lastly, the fifth component is verifying the outcomes’ reliability by comparing air-route length with the most realistic distance that the UAV currently exhibits. In summary, we found that the improved algorithm greatly shortened search time, and reduced path redundancy. The air-route lengths also comply with the farthest-distance requirement for UAVs currently on the markets. The study described basic ideas and key technologies of the UAV's low-altitude public air route research and can provide the core technical support for the UAV control systems.
Fig. 1 Diagram of path search direction图1 路径搜索方向示意 |
Fig. 2 Diagram of search space and variable search radius图2 搜索空间和可变搜索半径示意 |
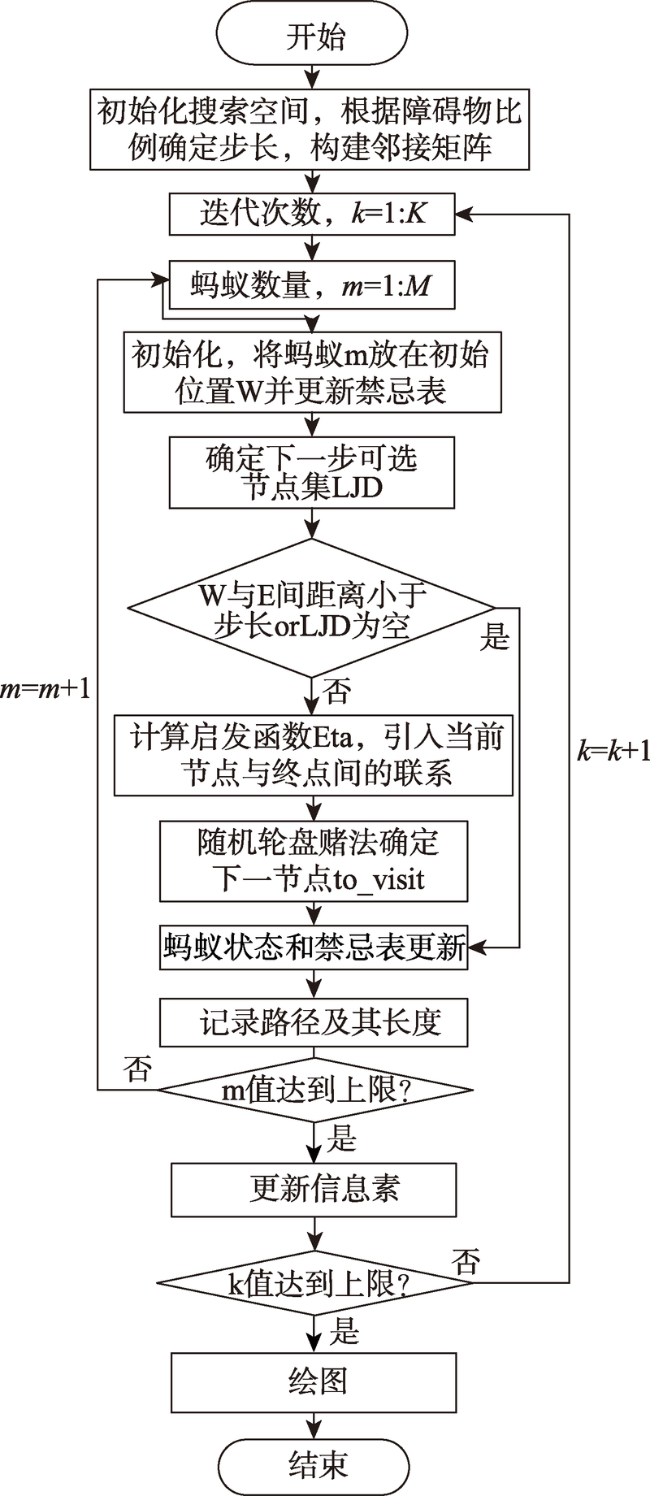
Fig. 3 Flowchart of the improved ACO algorithm图3 改进后的蚁群算法流程 |
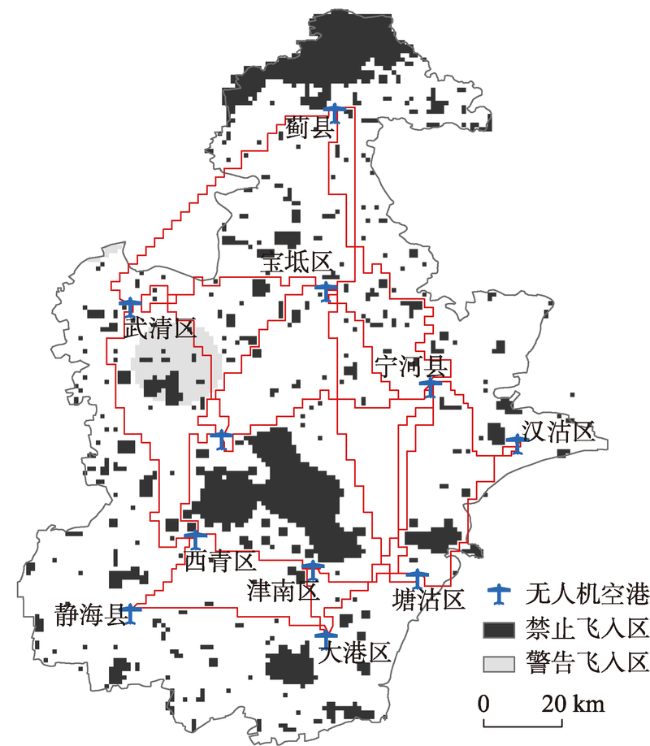
Fig. 4 The drone-port layout and part of the grid cost of low-altitude airspace environment in Tianjin图4 天津市无人机空港布局及其低空空域环境的部分网格成本代价示意(截至2018年) |
Tab. 1 The grid cost and access principle for each constraint表1 各约束条件网格成本代价及飞行准入原则 |
| 类型 | 网格成本代价 | 遵循原则 | 限制高度/m |
|---|---|---|---|
| 通信盲区 | 1 | 禁止飞入 | 120 |
| 政策限制区 | 1 | 禁止飞入 | 120 |
| 机场净空保护区 | 1 | 禁止飞入 | 120 |
| 地形 | 1 | 地形跟随 | 实际高度 |
| 低空气候 | 0.2~0.8 | 警告飞入 | 120 |
| 其他 | 0 | 可飞 | 0 |
Tab. 2 Comparison of performance before and after ACO algorithm improvement表2 蚁群算法改进前后性能对比 |
| 支线航路 | 算法类型 | 格网搜索空间 大小/格网数量 | 达到最优时迭代次数 | 搜索步长 | 搜索时长/s | 路径网格成本代价 | 最短路径长度/步长 | 路径长度/步长 | 迂回次数 |
|---|---|---|---|---|---|---|---|---|---|
| 宁河县-塘沽区 | 改进后 | 14×51 | 8/200 | 2 | 130 | 0 | 54 | 64 | 1 |
| 改进前 | 14×51 | 120/200 | 1 | 205 | 0 | 54 | 75 | 5 | |
| 武清区-西青区 | 改进后 | 26×60 | 10/200 | 2 | 332 | 3 | 93 | 93 | 0 |
| 改进前 | 26×60 | 75/200 | 1 | 452 | 0 | 81 | 105 | 10 | |
| 宁河县-津南区 | 改进后 | 38×49 | 10/200 | 2 | 667 | 0 | 76 | 82 | 5 |
| 改进前 | 38×49 | 80/200 | 1 | 795 | 0 | 76 | 89 | 9 |
Fig. 5 Comparison of results before and after algorithm improvement图5 算法改进结果对比 |
Fig. 6 Diagram of the layout of low-altitude feeder air routes in Tianjin图6 天津市无人机低空支线航路分布示意 |
Tab. 3 Length for each UAV low-altitude public air route in Tianjin表3 天津市各无人机低空公共路航段长度 |
| 序号 | 航段起点 | 起点经纬度 | 航段终点 | 终点经纬度 | 航段实际长度/km | 直线距离/km |
|---|---|---|---|---|---|---|
| 1 | 蓟县 | (117°26' E,40°01' N) | 宝坻区 | (117°25' E,39°36' N) | 56.58 | 45.54 |
| 2 | 蓟县 | (117°26' E,40°01' N) | 武清区 | (116°58' E,39°34' N) | 97.08 | 63.80 |
| 3 | 蓟县 | (117°26' E,40°01' N) | 宁河县 | (117°39' E,39°23' N) | 114.16 | 72.42 |
| 4 | 武清区 | (116°58' E,39°34' N) | 宝坻区 | (117°25' E,39°36' N) | 59.97 | 38.85 |
| 5 | 武清区 | (116°58' E,39°34' N) | 北辰区 | (117°10' E,39°16' N) | 64.68 | 38.28 |
| 6 | 武清区 | (116°58' E,39°34' N) | 西青区 | (117°07' E,39°02' N) | 91.67 | 60.66 |
| 7 | 宝坻区 | (117°25' E,39°36' N) | 宁河县 | (117°39' E,39°23' N) | 52.81 | 31.97 |
| 8 | 宝坻区 | (117°25' E,39°36' N) | 北辰区 | (117°10' E,39°16' N) | 67.84 | 43.02 |
| 9 | 宝坻区 | (117°25' E,39°36' N) | 塘沽区 | (117°37' E,38°56' N) | 102.01 | 75.45 |
| 10 | 宁河县 | (117°39' E,39°23' N) | 北辰区 | (117°10' E,39°16' N) | 72.61 | 43.47 |
| 11 | 宁河县 | (117°39' E,39°23' N) | 汉沽区 | (117°51' E,39°15' N) | 41.42 | 22.48 |
| 12 | 宁河县 | (117°39' E,39°23' N) | 塘沽区 | (117°37' E,38°56' N) | 63.52 | 48.90 |
| 13 | 宁河县 | (117°39' E,39°23' N) | 津南区 | (117°23' E,38°58' N) | 78.16 | 52.12 |
| 14 | 北辰区 | (117°10' E,39°16' N) | 西青区 | (117°07' E,39°02' N) | 42.05 | 26.05 |
| 15 | 西青区 | (117°07' E,39°02' N) | 静海县 | (116°58' E,38°52' N) | 31.30 | 22.91 |
| 16 | 西青区 | (117°07' E,39°02' N) | 津南区 | (117°23' E,38°58' N) | 32.80 | 24.64 |
| 17 | 汉沽区 | (117°51' E,39°15' N) | 塘沽区 | (117°37' E,38°56' N) | 60.39 | 39.74 |
| 18 | 津南区 | (117°23' E,38°58' N) | 大港区 | (117°25' E,38°48' N) | 26.91 | 17.94 |
| 19 | 静海县 | (116°58' E,38°52' N) | 大港区 | (117°25' E,38°48' N) | 45.00 | 39.63 |
| 20 | 塘沽区 | (117°37' E,38°56' N) | 大港区 | (117°25' E,38°48' N) | 36.51 | 23.94 |
| 合计 | 1237.48 | |||||
Tab. 4 Values of assessment indexes for UAV air routes network in Tianjin表4 天津市无人机航网络评价指标数值 |
| 指标 | 作用 | 公式 | 参数说明 | 计算值 |
|---|---|---|---|---|
| 网络连接度 | 衡量航路网的成熟度,连接度越高,网络越成熟 | N为航路网中的节点数量,Mi为第i节点邻接的边数,M为网络总边数 | 3.64 | |
| 非直线系数 | 两点间航路距离与其直线距离的比值,越接近1连接越便捷 | Lij表示节点ij间航段实际长度,Sij表示节点ij间直线距离 | 1.49 |
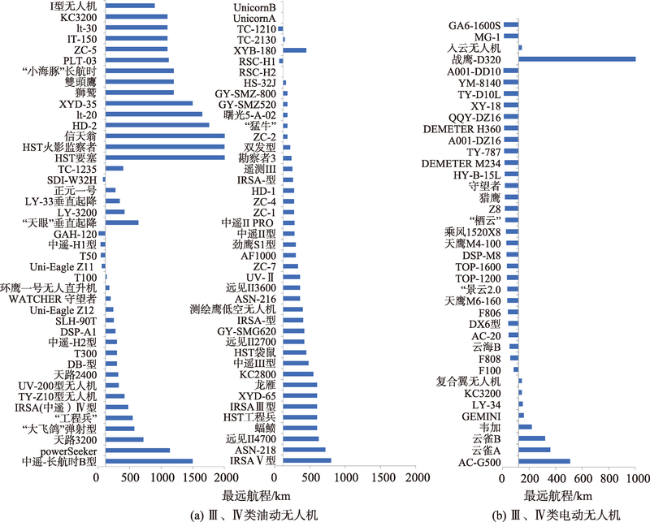
Fig. 7 Chart of the farthest distance for Ⅲ and Ⅳ UAVs图7 Ⅲ、Ⅳ类无人机最远航程统计 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[National Bureau of Statistics. Statistical communique of the People's Republic of China on 2017 national economic and social development [EB/OL]. ]
|
| [4] |
[
|
| [5] |
中国民用航空局. 2017年中国民用无人机驾驶航空器运行管理年报[R].北京:2018-03-22.
[Civil Aviation Administration of China (CAAC). Unmanned aircraft operation management of CAAC annual report 2017[R]. Beijing: 2018-03-22. ]
|
| [6] |
Unicefstories. Africa's first humanitarian drone testing corridor launched in Malawi by government and UNICEF.2017[EB/OL]. .
|
| [7] |
|
| [8] |
Zazulia N. Airbus testing unmanned package delivery in Singapore.2018[EB/OL]. .
|
| [9] |
[
|
| [10] |
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
[
|
| [20] |
|
| [21] |
|
| [22] |
[
|
| [23] |
|
| [24] |
[
|
| [25] |
[
|
| [26] |
[
|
| [27] |
[Resources and Environment Data Cloud Platform, Gridded dataset of Chinese population spatial distribution at 1kilometer resolution. [EB/OL].DOI:10.12078/2017121101]
|
| [28] |
[
|
| [29] |
[
|
| [30] |
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}