
基于区域特征分割的密集匹配点云渐进形态学滤波
作者简介:张 刚(1974-),男,吉林长春人,高级工程师,主要从事摄影测量及应用研究。E-mail: 43131904@qq.com
收稿日期: 2018-09-10
要求修回日期: 2019-03-25
网络出版日期: 2019-04-24
基金资助
国家重点研发计划项目(2017YFB0503004)
高分辨率对地观测系统重大专项(42-Y2-0A14-9001-17/18)
Progressive Morphological Filtering Method of Dense Matching Point Cloud based on Region Feature Segmentation
Received date: 2018-09-10
Request revised date: 2019-03-25
Online published: 2019-04-24
Supported by
National Key Research and Development Program of China, No.2017YFB0503004
National S&T Major Project for High-resolution Earth Observation System, No.42-Y2-0A14-9001-17/18
Copyright
随着计算机视觉和遥感技术的进步,基于遥感影像的密集匹配也成为目前获取高精度点云的重要手段之一。与LiDAR点云类似,点云数据处理的基础步骤就是点云滤波。在数据特征上,密集匹配生成的点云与LiDAR获取的点云既类似但又有区别。本文在渐进形态学滤波算法上添加了特征条件,将点云和图像结合成深度图像,并对深度图像按典型地物类型进行语义分割,从而对与图像平面坐标一致的点云进行标记和首次滤波;然后按几何特征将场景简单分类,按分类结果对应的参数滤波构建地面点三角网;最后综合初滤波结果和语义分割类型标记对特征相似的区域进行优化确认,得到最终的滤波结果,并与布料模拟滤波(CSF)算法进行了对比验证实验。结果表明,基于特征的渐进形态学滤波其I类误差在1.98%以内,Ⅱ类误差在2.33%以内,较适宜对精度要求较高的应用,尤其是混合地形的滤波。
张刚 , 刘文彬 , 张男 . 基于区域特征分割的密集匹配点云渐进形态学滤波[J]. 地球信息科学学报, 2019 , 21(4) : 615 -622 . DOI: 10.12082/dqxxkx.2018.0452
With the progress of computer vision and RS, dense matching based on remote sensing images has also become one of the important means to obtain high-precision point clouds. Like point clouds of LiDAR, filtering is the fundamental step. Dense matching point cloud is similar with LiDAR point cloud, but have different feature. In this paper, the feature condition is added to the progressive morphological filtering algorithm, point clouds and images are combined into RGB-Depth images, and depth images are semantically segmented according to typical object types, so that point clouds which coordinate correspond with image coordinate are marked and filtered for the first time. Then divide point clouds by grid, then do simply classified according to geometric features, and the improved irregular triangular network of ground points is constructed by filter parameters corresponding to the classification results. Finally, use and intergraded the pre-filtering results and the semantic segmentation results, the regions with similar features are optimized and confirmed by predefined parameter, and the final filtering results are obtained. The results are compared with results of the Cloth Simulated Filtering algorithm. The test result was show that type I error less than 1.98%, type II error less than 2.33% of the progressive morphological filtering algorithm, that algorithm is suitable for higher precision application, especially mixed terrain points cloud filtering.
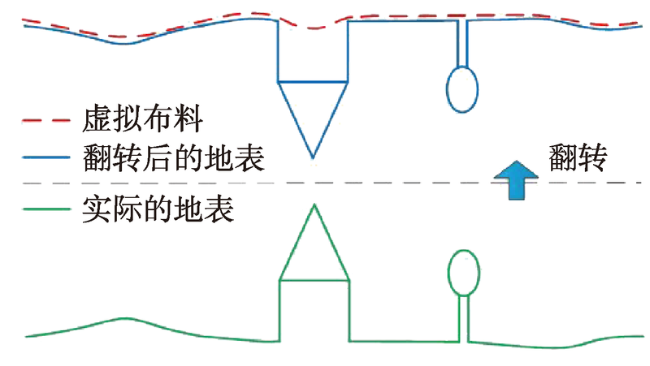
Fig. 1 Schema of CSF filtering algorithm图1 CSF滤波算法示意 |
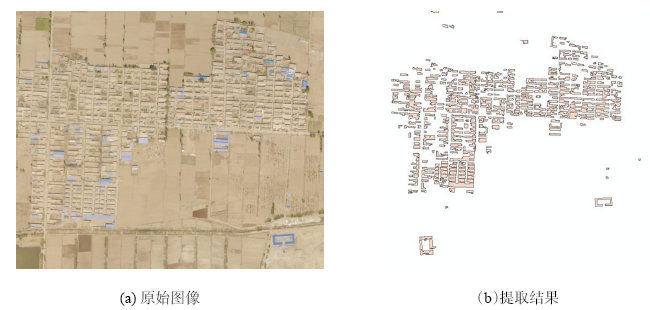
Fig. 2 Building boundary extraction from remote sensing images based on deep learning图2 基于深度学习的遥感影像建筑物边界提取 |
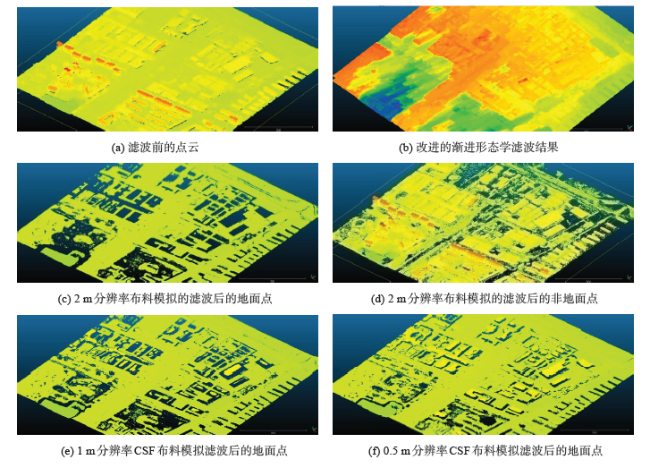
Fig. 3 Comparisons of improved asymptotic morphological filtering and CSF filtering for point clouds (example 1)图3 实例1点云改进的渐进形态学滤波与CSF滤波滤波对比 |
Tab. 1 Comparing and analyzing the error and efficiency of point cloud modified asymptotic morphological filtering with CSF (example 1)表1 实例1点云改进的渐进形态学滤波与CSF滤波误差和效率对比分析 |
| 滤波算法 | 用时/s | 第I类误差点占比/% | 第Ⅱ类误差点占比/% |
|---|---|---|---|
| 改进的渐进形态学滤波 | 320 | 1.07 | 1.22 |
| 2 m分辨率CSF滤波 | 10 | 3.11 | 1.73 |
| 1 m分辨率CSF滤波 | 30 | 1.32 | 3.14 |
| 0.5 m分辨率CSF滤波 | 90 | 0.85 | 6.98 |
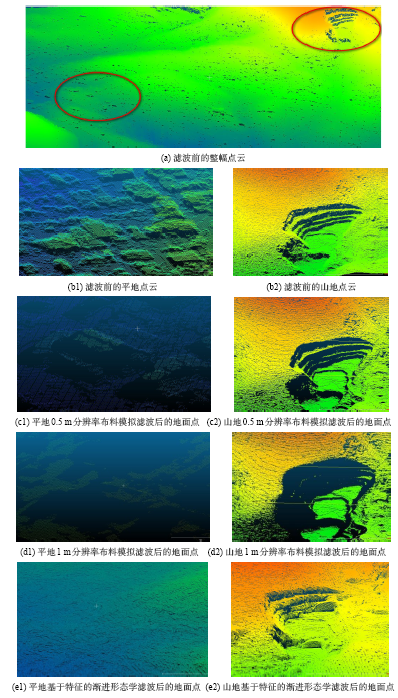
Fig. 4 Comparisons of improved asymptotic morphological filtering and CSF filtering for point clouds (example 2)图4 实例2点云改进的渐进形态学滤波与CSF滤波对比图 |
Tab. 2 Comparing and analyzing the error and efficiency of point cloud modified asymptotic morphological filtering with CSF (example 2)表2 实例2点云改进的渐进形态学滤波与CSF误差和效率对比分析 |
| 算法 | 用时/min | 第I类误差点占比/% | 第Ⅱ类误差点占比/% |
|---|---|---|---|
| 改进的渐进形态学滤波 | 20 | 1.98 | 2.33 |
| 1 m分辨率CSF滤波 | 5 | 6.63 | 3.24 |
| 0.5 m分辨率CSF滤波 | 15 | 3.89 | 4.98 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
|
| [20] |
|
| [21] |
011003.
[
|
| [22] |
|
| [23] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}