
高精度室内地图辅助VLC与PDR融合定位
|
尤承增(1993-),男,山东枣庄人,硕士生,主要研究方向为室内定位技术、地理信息系统。E-mail: youcz@radi.ac.cn |
收稿日期: 2019-01-30
要求修回日期: 2019-05-13
网络出版日期: 2019-09-24
基金资助
国家科技支撑计划项目(2015BAJ02B03)
版权
VLC and PDR Fusion Positioning by Incorporating High-Precision Indoor Map
Received date: 2019-01-30
Request revised date: 2019-05-13
Online published: 2019-09-24
Supported by
National Key Technology Research and Development Program(2015BAJ02B03)
Copyright
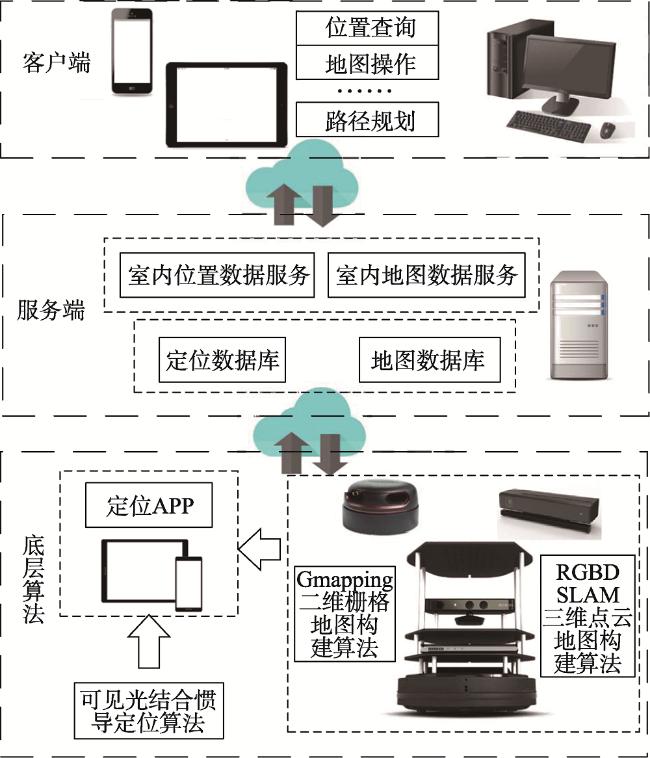
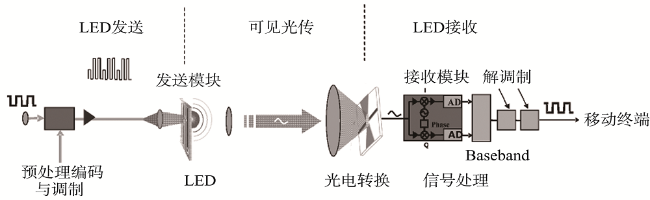
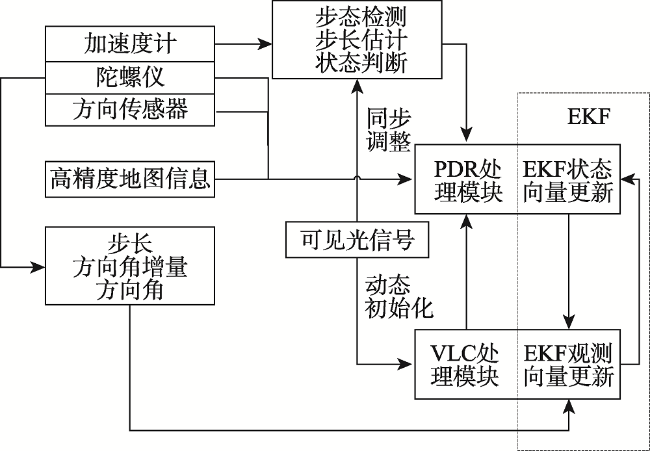
针对传统室内定位方式存在的忽略地图精度对于整体定位精度的支撑性作用、需要额外的辅助设施和附加模块以协助定位系统实现目标点定位、定位信标的保密性差、定位信号源与辅助基站等具有较强的信号辐射等问题,本研究引入高精度室内地图辅助,提出了一种VLC与PDR融合的室内定位算法。首先,本研究摒弃了传统人工勾绘方式,在室内扫描机器人turtlrbot平台上(装载有二维激光扫描雷达),利用Gmapping二维栅格地图构建算法,生成高精度室内地图。在此基础上,采用扩展卡尔曼滤波算法结合高精度地图信息实现VLC与PDR融合定位。该融合定位算法较好地结合了VLC定位与PDR定位各自的技术优势,实现了VLC定位结合高精度地图信息对PDR定位自适应动态纠偏,对于进一步实现新型低成本、无信号辐射、保密性强、附加模块少的高精度室内定位提供了较好的理论与技术支撑。实验结果表明:在高精度室内扫描地图构建过程中,其测距分辨率<0.5 mm,VLC与PDR融合定位算法的整体定位精度为1.33 m,平均定位响应时间为0.58 s。
尤承增 , 彭玲 , 王建辉 , 文聪聪 , 陈若男 . 高精度室内地图辅助VLC与PDR融合定位[J]. 地球信息科学学报, 2019 , 21(9) : 1402 -1410 . DOI: 10.12082/dqxxkx.2019.190061
In traditional indoor positioning field, there are many technical difficulties need to be solved. For instance, it is true that most researchers in their studies have neglected the accuracy of base map which is an indispensable factor and essential foundation of the overall accuracy of indoor positioning. On top of that, current indoor positioning system needs auxiliary facilities and multiple additional modules to assist the whole system to achieve positioning. Furthermore, beacons which are used to locate where the user is have the disadvantages of poor confidentiality while radiating strong signals at the same time. Aiming at those problems, this article proposed a fusion indoor positioning algorithm which was based on Visual Light Communication technology and Pedestrian Dead Reckoning algorithm. Particularly, we combined the information of high-precision indoor map and designed a high-precision indoor map-assisted positioning system to improve the accuracy of the positioning results. To be specific, abandoning the traditional mapping method which was generated by manual drawing, we used the Turtlrbot platform (an indoor drawing robot equipped with two-dimensional laser scanning radar) to construct the high-precision indoor map while it was moving in the interior space. In the process of indoor map construction, the Gmapping algorithm in the platform was run to build a two-dimensional grid map in a quite fast speed. Based on this, we used the Extended Kalman Filter algorithm to combine the Visual Light Communication technology with Pedestrian Dead Reckoning algorithm to achieve fusion positioning which was assisted with the high-precision map information. As shown in the experiments, the fusion positioning algorithm actually managed to combine the technical advantages of both Visual Light Communication and Pedestrian Dead Reckoning algorithm. Besides, the fusion algorithm realized a fairly ideal state where VLC positioning was able to combine with the information of high-precision map to provide adaptive and dynamic correction to the positioning results of Pedestrian Dead Reckoning algorithm, thus further providing better theoretical support and technical reference for the new kind of high-precision indoor positioning which had the characteristics of low-cost, no signal radiation, strong confidentiality with a small number of auxiliary facilities and additional modules. The experimental results showed as follows: Firstly, the ranging resolution during map construction was less than 0.5 mm; Secondly, the overall accuracy of fusion positioning was 1.33 m; Lastly, the average positioning response time was 0.58 s.
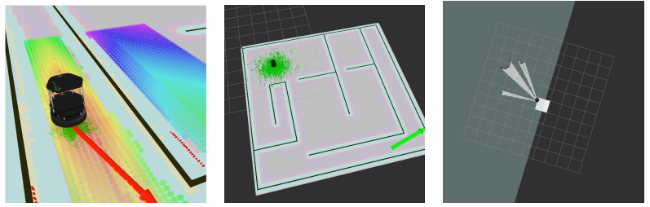
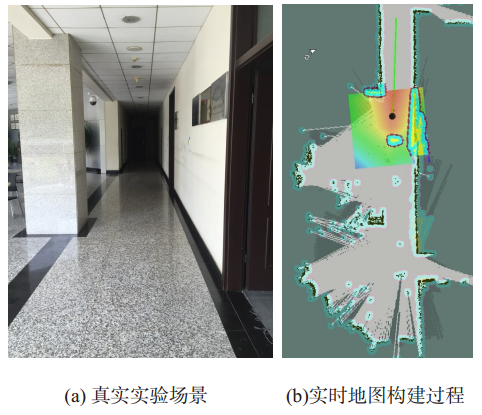
图5 实验场景及Gmapping地图构建过程注:黑色圆点为本研究采用的移动机器人平台,绿色直线为规划扫描路线,方形彩色区域为障碍搜索范围,供机器人及时调节状态并躲避障碍。 Fig. 5 Experimental scene and the Gmapping map construction process |
表1 室内地图构建各指标测量值Tab. 1 Indicator measurements of indoor map construction |
| 项目 | 测量值 |
|---|---|
| 测距范围/m | 0.15~18 |
| 扫描角度/° | 0~360 |
| 角度分辨率/° | 0.9 |
| 单次测距时间/ms | 0.25 |
| 测量频率/hz | 2000~8000 |
| 扫描频率/hz | 5~15 |
| 测距分辨率/ms | <实际距离的1% |
表2 VLC定位各项指标测量值Tab. 2 Indicators measurements of VLC positioning |
| 项目 | 测量值 |
|---|---|
| 整体定位精度/m | 2.64 |
| 定位点误差范围/m | 0.8 |
| 响应时间/s | 平均时间0.32 |
| 定位稳定性 | 定位点零漂移,体验感强 |
| 布设设备成本 | 嵌入式调制模块成本1元以内 |
表3 3种定位结果对比(部分)Tab. 3 Comparison of the three positioning methods (part) |
| 目标位置 | VLC定位 | PDR定位 | VLC-PDR定位 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| x | y | x | y | 误差 | x | y | 误差 | x | y | 误差 |
| 3.30 | 5.97 | 2.80 | 5.60 | 0.62 | 2.67 | 5.46 | 0.81 | 2.27 | 6.85 | 1.36 |
| 4.84 | 3.12 | 2.80 | 2.80 | 2.06 | 8.83 | 6.38 | 5.15 | 4.32 | 2.68 | 0.68 |
| 7.88 | 6.78 | 7.00 | 2.80 | 4.08 | 11.82 | 10.00 | 5.09 | 8.46 | 7.28 | 0.77 |
| 9.90 | 8.54 | 7.00 | 8.40 | 2.90 | 6.41 | 11.39 | 4.50 | 9.03 | 7.80 | 1.14 |
| 6.24 | 7.40 | 4.90 | 7.40 | 1.34 | 9.91 | 4.40 | 4.74 | 6.80 | 7.88 | 0.74 |
| [1] |
|
| [2] |
承达瑜, 秦坤, 裴韬 , 等. 基于室内定位数据的群体时空行为可视化分析[J]. 地球信息科学学报, 2019,21(1):36-45.
[
|
| [3] |
黄华晋, 秦建息 . 基于三角定位算法的WiFi室内定位系统设计[J]. 广西科学院学报, 2016,32(1):59-61.
[
|
| [4] |
张梦丹, 光跃, 王宏刚 , 等. 基于指纹算法的无线室内定位技术[J]. 电信科学, 2016,32(10):77-86.
[
|
| [5] |
阮陵, 张翎, 许越 , 等. 室内定位:分类、方法与应用综述[J]. 地理信息世界, 2015(2):8-14.
[
|
| [6] |
王琦 . 基于RSSI测距的室内定位技术[J]. 电子科技, 2012,25(6):64.
[
|
| [7] |
汪苑, 林锦国 . 几种常用室内定位技术的探讨[J]. 中国仪器仪表, 2011(2):54-57.
[
|
| [8] |
孙大洋, 钱志鸿, 韩梦飞 , 等. 无线传感器网络中多边定位的聚类分析改进算法[J]. 电子学报, 2014,42(8):1601-1607.
[
|
| [9] |
胡斌斌, 倪晓军 . 基于RSSI测距室内定位改进质心算法[J]. 计算机技术与发展, 2017,27(9):133-136.
[
|
| [10] |
周晓军 . 基于室外辅助和惯性导航的室内定位方法的研究与实现[D]. 杭州:杭州电子科技大学, 2014.
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
刘云, 房飞翔 . 多输入融合卡尔曼滤波算法在矿井定位中的优化研究[J]. 传感器与微系统, 2018,37(1):83-86.
[
|
| [17] |
|
| [18] |
曾显彬 . 基于超声波与红外线的室内实时定位系统的研究与实现[D]. 泉州:华侨大学, 2017.
[
|
| [19] |
周群, 沈重, 张鲲 , 等. 基于融合算法的GPS/UWB/MARG协同定位系统研究[J]. 现代电子技术, 2018(6):82-86.
[
|
| [20] |
赵晶亮, 姚金杰, 苏新彦 , 等. 基于射频识别的室内定位系统设计[J]. 计算机测量与控制, 2011,19(11):2848-2850.
[
|
| [21] |
赵延鹏, 时伟, 艾明曦 . 室内行人航迹推算/超声波组合定位融合算法[J]. 中南大学学报(自然科学版), 2016,47(5):1588-1598.
[
|
| [22] |
|
| [23] |
|
| [24] |
华海亮 . 基于WiFi和蓝牙的室内定位技术研究[D]. 吉林:辽宁工业大学, 2016.
[
|
| [25] |
|
| [26] |
|
| [27] |
宋宇, 喻文举, 程超 , 等. 基于WiFi、PDR、地磁相融合的室内定位研究[J]. 微电子学与计算机, 2018,35(6):66-70.
[
|
| [28] |
|
| [29] |
刘涛, 张星, 李清泉 , 等. 一种运动恢复结构和航位推算结合的室内行人视觉定位方法[J]. 地球信息科学学报, 2017,19(6):744-753.
[
|
| [30] |
赵鹏 . 手术导航系统中光学和惯性组合定位方法的研究[D]. 北京:清华大学, 2015.
[
|
| [31] |
刘明伟, 刘太君, 叶焱 , 等. 基于低功耗蓝牙技术的室内定位应用研究[J]. 无线通信技术, 2015,24(3):19-23.
[
|
| [32] |
|
| [33] |
邹倩, 夏玮玮, 张静 , 等. 基于VLC与IMU融合的移动物体跟踪室内定位系统[J]. 东南大学学报(英文版), 2018(4):451-458.
[
|
| [34] |
高文研, 平雪良, 贝旭颖 , 等. 两种基于激光雷达的SLAM算法最优参数分析[J]. 传感器与微系统, 2018,37(4):28-30.
[
|
| [35] |
宫婉婷, 孙作雷, 潘盼 . 基于二维激光的机器人室内构图[J]. 微型机与应用, 2017,36(18):55-58.
[
|
| [36] |
|
| [37] |
赵嘉琦, 迟楠 . 室内LED可见光定位若干关键技术的比较研究[J]. 灯与照明, 2015(1):34-41.
[
|
| [38] |
吴楠, 杨爱英, 冯立辉 , 等. 可见光定位关键技术的研究与展望[J]. 南京信息工程大学学报(自然科学版), 2017,9(2):159-167.
[
|
| [39] |
宋敏, 申闫春 . 室内定位航位推测算法的研究与实现[J]. 计算机工程, 2013,39(7):293-297.
[
|
| [40] |
陈国良, 张言哲, 汪云甲 , 等. WiFi-PDR室内组合定位的无迹卡尔曼滤波算法[J]. 测绘学报, 2015,44(12):1314-1321.
[
|
| [41] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}