
基于动态极坐标参数化的遥感影像匹配方法
|
孙嘉玉(1993-),男,吉林白山人,硕士生,主要从事遥感数字图像处理、三维重建等研究。E-mail: sunjiayu@pku.edu.cn |
收稿日期: 2019-02-27
要求修回日期: 2019-05-23
网络出版日期: 2019-10-29
基金资助
国家重点研发计划项目(2017YFB0503000)
国家自然科学基金项目(61841101)
版权
A Remote Sensing Image Matching Method based on Dynamic Polar Coordinate Parame-terization
Received date: 2019-02-27
Request revised date: 2019-05-23
Online published: 2019-10-29
Supported by
National Key Research and Development Program of China(2017YFB0503000)
National Natural Science Foundation of China(61841101)
Copyright
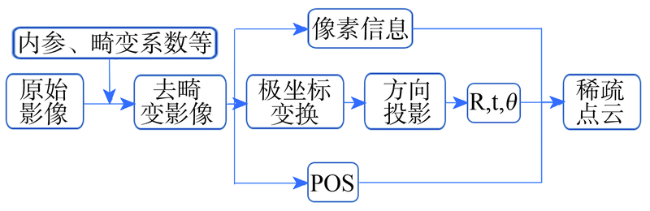
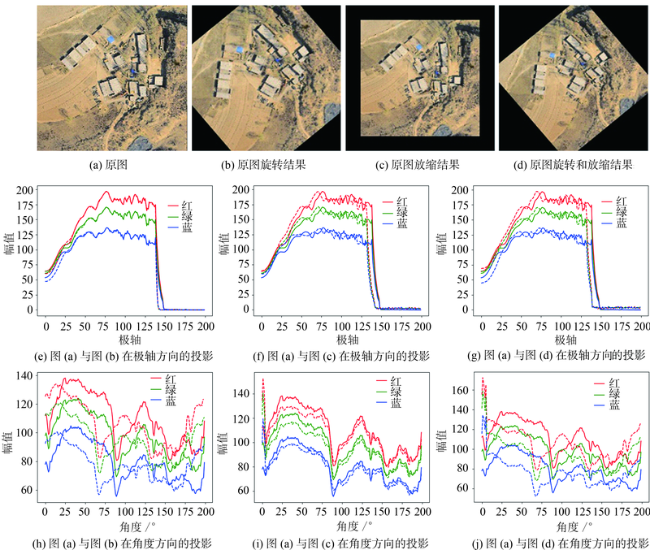
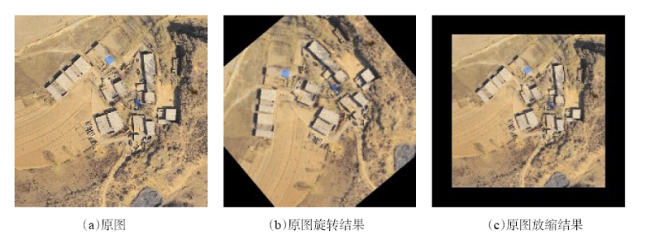
图像匹配作为三维重建至关重要的环节,其精度直接影响了平差优化、正射校正等模块的精度。对于城镇、农场等特征密集型区域,特征距离小,相似性强,易于匹配图像;而针对草地、沙漠等特征不明显区域,特征距离大,如果使用特征点匹配的方法,严格阈值下难以获得足够数量的匹配对,放宽阈值又将引入较多误匹配对,这也是导致稀疏点云不够均匀的原因之一。在此场景下,本文提出了基于动态极坐标参数化的无人机正视影像匹配算法,首先对图像做极坐标参数变化,采用动态策略解决极轴方向采样不均匀的问题,使用最小二乘法对得到的极坐标影像对做位移方向上的匹配,匹配后得到的旋转量和平移量,将该结果和SIFT算法的结果做比较。本文设计了2组实验,即参数已知的解算实验和参数未知的解算实验,且每组实验进行3次。在同等配置的计算机上,对两张7360像素×5400像素,32位的影像,本文方法的位姿解算时间相比SIFT的时间减少约57%,二者求得的位姿差通常小于1%。结论表明二者的结果在精度上表现相当,在时间上明显优于SIFT算法,具有实际的应用价值。
孙嘉玉 , 左正康 , 孙逸渊 , SanaUllah , 张瑞华 , 赵海盟 . 基于动态极坐标参数化的遥感影像匹配方法[J]. 地球信息科学学报, 2019 , 21(10) : 1586 -1593 . DOI: 10.12082/dqxxkx.2019.190081
With the promotion of 3D reconstruction technology in various scenarios, especially in 3D reconstruction from remote sensing images, the demand for accurate 3D point clouds are becoming more and more intense. Image matching is an important procedure in 3D reconstruction, and its result directly affects the accuracy of subsequent procedures such as bundle adjustment and orthore.pngication. In feature-intensive areas such as towns and farms, the feature distance is small enough to match well. Based on high confidence, the precision of image matching is high. However, in featureless areas such as grassland and desert, the large feature distance may cause mismatch between images. If the feature point matching method is used, it is difficult to obtain correct pose under high thresholds. If a sufficient number of matching pairs is promoted, the matching pairs will contain many mismatching ones, which will cause failure to image matching, and the sparse point cloud will not be evenly distributed. In this scenario, a forward-looking image matching algorithm based on dynamic polar coordinate parameterization was presented. First, a polar transform was designed to a pair of normal images, a dynamic strategy was designed to solve the problem of uneven sampling in the polar axis direction. The obtained polar coordinate image pair was matched with the least squares method in the rotation and translation directions. After the rotation and translation parameters were calculated, we used the result to compared with the result of the SIFT algorithm. In this paper, two sets of experiments were designed to obtain poses between images: one is to use simulation datasets with known rotation and translation parameters; the other is to use true scene datasets with unknown rotation and translation parameters. In each set of the experiments, we used 3 different pair of images, and 3 different known rotation and translation parameters in the first set. With the same computer hardware, and with two images with a resolution of 7360 pixels * 5400 pixels and depth of 32 bit, the proposed method took about 57% less than the time took by the SIFT algorithm, and the rotation and translation error in the two methods was usually less than 1%. Our findings suggest that the proposed algorithm gets image poses with an accuracy similar to that of the SIFT algorithm, but its time consumption is significantly less. Our algorithm shows good practical application value.
表1 只存在旋转时的匹配结果Tab. 1 Matching results with rotation |
| 操作 | 旋转角度/° | 差异度 | ||
|---|---|---|---|---|
| 实际变换值 | 本文实验结果 | SIFT实验结果 | ||
| 1 | 40 | 41.25 | 41.05 | 0.20 |
| 2 | 60 | 59.50 | 58.00 | 1.50 |
| 3 | 120 | 121.12 | 120.45 | 0.67 |
表2 只存在放缩变换的匹配结果Tab. 2 Matching results with scaling |
| 操作 | 放缩因子/倍 | 差异度 | ||
|---|---|---|---|---|
| 实际变换值 | 本文实验结果 | SIFT实验结果 | ||
| 1 | 1.1 | 1.082 | 1.079 | <0.01 |
| 2 | 1.2 | 1.124 | 1.163 | 0.04 |
| 3 | 0.9 | 0.937 | 0.945 | <0.01 |
表4 3次实验的匹配结果Tab. 4 Image matching results in the three experiments |
| 实验记录 | 本文实验结果 | SIFT实验结果 | 差异度 | |||||
|---|---|---|---|---|---|---|---|---|
| 放缩因子/倍 | 旋转角度/° | 放缩因子/倍 | 旋转角度/° | 放缩因子 | 旋转角度 | |||
| 1 | 1.026 | 5.44 | 1.002 | 4.38 | 0.024 | 0.242 | ||
| 2 | 0.958 | 8.02 | 0.978 | 9.15 | 0.020 | 0.123 | ||
| 3 | 1.034 | 4.69 | 1.056 | 4.92 | 0.021 | 0.146 | ||
表5 3次实验的耗时情况Tab. 5 Time consumption in the three experiments |
| 实验记录 | 本文实验耗时/s | SIFT耗时/s | 节约率/% |
|---|---|---|---|
| 1 | 0.832 | 2.235 | 62.8 |
| 2 | 0.904 | 2.127 | 57.5 |
| 3 | 0.866 | 2.165 | 60.3 |
| [1] |
廖小罕, 周成虎, 苏奋振 , 等. 无人机遥感众创时代[J]. 地球信息科学学报, 2016,18(11):1439-1447.
[
|
| [2] |
郭倩茜 . 图像匹配的主要方法分析[J]. 科技创新与应用, 2016(20):81-81.
[
|
| [3] |
Yitzhaki, Shlomo. "Gini's mean difference: A superior measure of variability for non-normal distributions"[J]. Metron International Journal of Statistics. Springer Verlag, 2003,61(2):285-316.
|
| [4] |
|
| [5] |
陈宁江, 李介谷 . 用归一化灰度组合法进行图像匹配[J]. 红外与激光工程, 2000(5):1-1.
[
|
| [6] |
山海涛, 郭建星, 耿则勋 . 影像匹配中几种相似性测度的分析[J]. 测绘信息与工程, 2003,28(4):11-13.
[
|
| [7] |
|
| [8] |
Harris,
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
Morel, Jean-Michel, and Guoshen Yu. ASIFT: A new framework for fully affine invariant image comparison[J]. SIAM journal on imaging sciences 2. 2(2009):438-469.
|
| [15] |
|
| [16] |
杨佳宾, 姜永涛, 杨幸彬 , 等. 基于Dense SIFT特征的无人机影像快速拼接方法[J]. 地球信息科学学报, 2019,21(4):588-599.
[
|
| [17] |
宫阿都, 何孝莹, 雷添杰 , 等. 无控制点数据的无人机影像快速处理[J]. 地球信息科学学报, 2011,12(2):254-260.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}