
卫星对地覆盖时间窗口实时计算方法
|
卢万杰(1991-),男,河南焦作人,博士生,主要从事空间目标态势分析与服务研究。 E-mail: lwj285149763@163.com |
收稿日期: 2019-05-30
要求修回日期: 2019-08-16
网络出版日期: 2019-12-11
基金资助
国家自然科学基金项目(No.41701463)
版权
A Real-Time Calculation Method for Satellite Ground Coverage Time Window
Received date: 2019-05-30
Request revised date: 2019-08-16
Online published: 2019-12-11
Supported by
National Natural Science Foundation of China(No.41701463)
Copyright
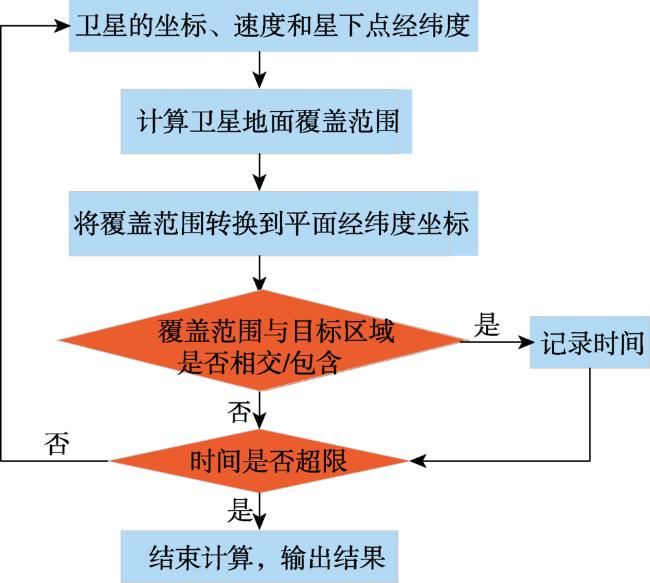
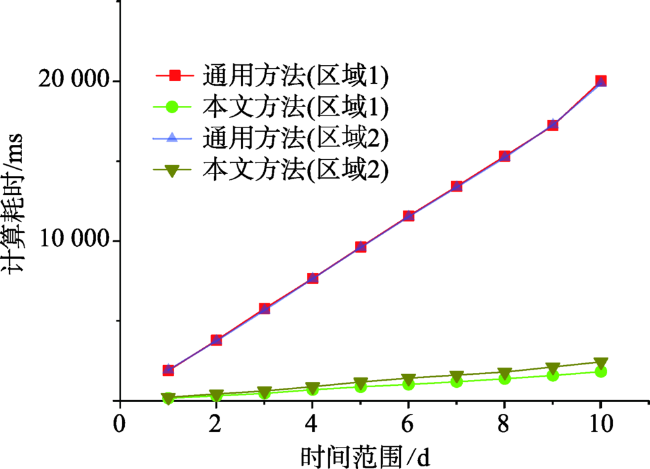
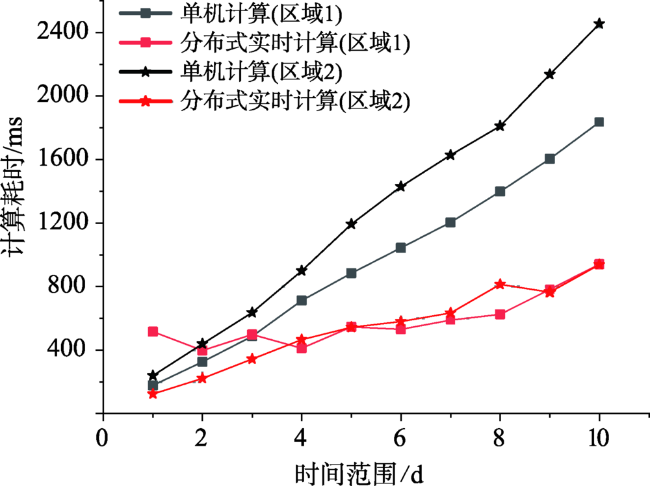
卫星对地覆盖时间窗口的高效计算能够有效地保障遥感卫星数据信息资源的管理与应用。为解决现有卫星对地覆盖时间窗口计算方法无法提供同时保证精度、效率和实时性的在线服务的问题,提出了一种实时卫星对地覆盖时间窗口计算服务方法。在时间窗口的通用计算方法基础上,建立了地面区域的扩充四至范围,通过判断卫星星下点与地面区域的扩充四至范围的空间关系来决定是否需要计算卫星对地覆盖区域;在卫星对地覆盖区域与地面区域空间关系发生变化时,通过双重时间步长策略提高计算效率和精度;使用流计算框架构建算法的实时在线服务。实验结果表明,与商业软件采用的跟踪传播算法对比,本文方法与其计算结果差异较小,均小于1 s,说明本文方法能够保证较高的计算精度;与传统跟踪传播算法相比,本文方法耗时大幅减少,实现了超过8倍的加速比。本文方法同时保证了精度、效率和实时性,能够满足不同场景下卫星对地覆盖时间窗口的计算需求。
卢万杰 , 徐青 , 蓝朝桢 , 周杨 . 卫星对地覆盖时间窗口实时计算方法[J]. 地球信息科学学报, 2019 , 21(11) : 1689 -1698 . DOI: 10.12082/dqxxkx.2019.190263
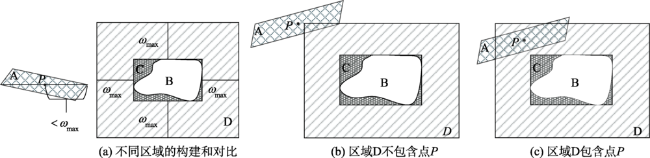
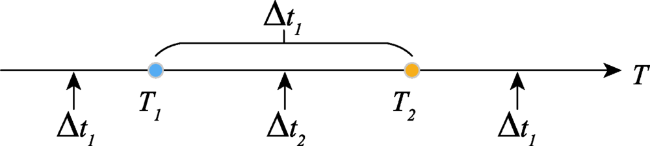
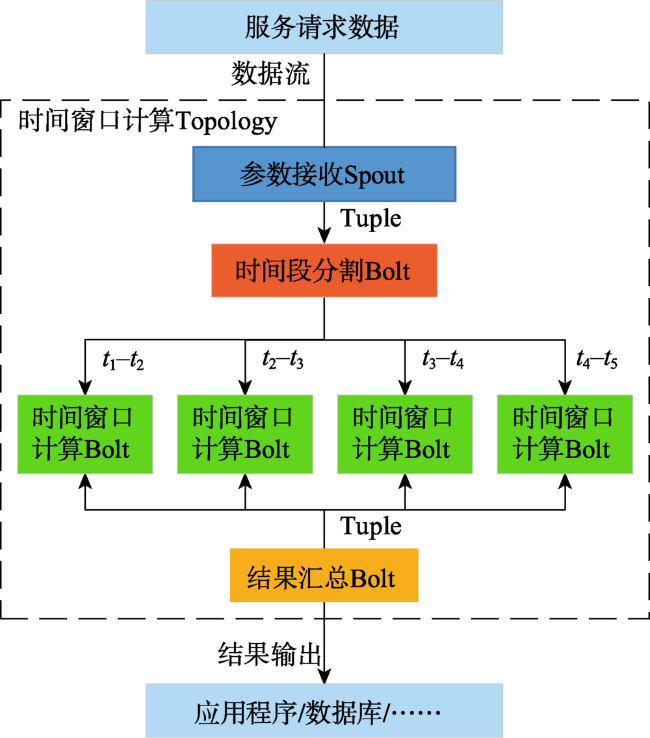
Efficient calculation of satellite ground coverage time window can guarantee the management and application of remote sensing satellite data. To solve the problem that existing algorithms for calculating the satellite ground coverage time window cannot provide real-time online service, which needs to guarantee the accuracy, efficiency and timeliness simultaneously, a real-time calculation service for satellite ground coverage time window was proposed in the present study. Based on the common calculation algorithm, the extended bounding box of ground area was established by extending a certain angle in four directions. By judging the spatial relationship between the sub-satellite point and the extended bounding box of ground area, whether the satellite ground coverage area should be calculated precisely was determined. If the sub-satellite point and the extended bounding box of the ground area were disjoint, there was no need to calculate the satellite ground coverage area, which avoids a large number of redundant calculation. Otherwise, the satellite ground coverage area was calculated and the spatial relationship between them was obtained. When the spatial relationship between the satellite ground coverage area and the ground area changed, there existed the start or stop time point of the satellite ground coverage time window, and two kinds of time steps were used to improve the calculation efficiency and accuracy of the time window. Finally, the distributed streaming calculation framework was used to build the real-time online service based on the proposed algorithm, and the topology of data processing was established to implement the algorithm. In the streaming calculation framework, the calculation processes of the satellite ground coverage time window are segmented and each result is integrated after the calculation processes are completed. The final calculation results can be stored in the database or used by different applications. Compared with the tracking propagation algorithm used by business software, our findings from the experimental results suggest that the difference between the proposed method and the business software is small, all of which are less than 1s, and that the real-time calculation service can ensure the accuracy, efficiency, and timeliness. Contrasting to the common tracking propagation algorithm, the real-time calculation service takes less time with an acceleration ratio of over 8 times. The proposed real-time calculation service can meet the requirements for calculating satellite ground coverage time window in terms of accuracy, efficiency, and timeliness in different scenarios.
表1 卫星对地覆盖区域时间窗口计算实验数据Tab. 1 Experimental data for the calculation of satellite ground coverage time window |
| 类别 | 参数 |
|---|---|
| TLE[28] | |
| 起止时间 | 2018-07-01 00:00:00~2018-07-11 00:00:00 |
| 时间步长 | |
| 矩形模型[29] | |
| 区域1(E, N) | (89.36° E, 31.30° N), (89.21° E, 27.35° N), (95.52° E, 27.15° N), (95.57° E, 30.96° N) |
| 区域2(W, N) | (110.60° W, 43.32° N), (104.75° W, 42.83° N), (104.15° W, 45.85° N), (104.45° W, 49.13° N), (109.68° W, 50.54° N), (110.18° W, 46.94° N) |
表2 卫星对地覆盖区域时间窗口计算结果对比Tab. 2 Results comparison of satellite ground coverage time window |
| 区域 编号 | 窗口 编号 | 本文算法起始时刻 (UTC时间) | 本文算法终止时刻 (UTC时间) | STK预报起始时刻 (UTC时间) | STK预报终止时刻 (UTC时间) |
|---|---|---|---|---|---|
| 区域1 | 1 | 2018-07-02T04:32:37.85 | 2018-07-02T04:33:43.06 | 2018-07-02T04:32:37.48 | 2018-07-02T04:33:43.06 |
| 2 | 2018-07-03T04:13:27.40 | 2018-07-03T04:14:30.61 | 2018-07-03T04:13:27.49 | 2018-07-03T04:14:30.34 | |
| 3 | 2018-07-04T16:00:01.65 | 2018-07-04T16:01:08.64 | 2018-07-04T16:00:01.95 | 2018-07-04T16:01:08.53 | |
| 4 | 2018-07-05T15:40:44.48 | 2018-07-05T15:41:49.93 | 2018-07-05T15:40:44.37 | 2018-07-05T15:41:50.25 | |
| 5 | 2018-07-07T04:31:06.46 | 2018-07-07T04:32:11.51 | 2018-07-07T04:31:06.04 | 2018-07-07T04:32:11.38 | |
| 6 | 2018-07-08T04:11:57.58 | 2018-07-08T04:12:58.69 | 2018-07-08T04:11:57.65 | 2018-07-08T04:12:58.53 | |
| 7 | 2018-07-09T15:58:29.07 | 2018-07-09T15:59:36.37 | 2018-07-09T15:58:29.43 | 2018-07-09T15:59:36.35 | |
| 8 | 2018-07-10T15:39:12.61 | 2018-07-10T15:40:16.78 | 2018-07-10T15:39:12.50 | 2018-07-10T15:40:17.00 | |
| 区域2 | 1 | 2018-07-04T05:01:11.99 | 2018-07-04T05:02:56.78 | 2018-07-04T05:01:12.51 | 2018-07-04T05:02:56.93 |
| 2 | 2018-07-04T18:01:37.08 | 2018-07-04T18:03:27.05 | 2018-07-04T18:01:36.58 | 2018-07-04T18:03:26.84 | |
| 3 | 2018-07-05T04:42:34.29 | 2018-07-05T04:43:44.11 | 2018-07-05T04:42:34.34 | 2018-07-05T04:43:44.55 | |
| 4 | 2018-07-05T17:43:28.43 | 2018-07-05T17:44:18.35 | 2018-07-05T17:43:28.51 | 2018-07-05T17:44:18.29 | |
| 5 | 2018-07-09T04:59:39.16 | 2018-07-09T05:01:37.93 | 2018-07-09T04:59:39.66 | 2018-07-09T05:01:37.90 | |
| 6 | 2018-07-09T18:00:06.08 | 2018-07-09T18:01:54.90 | 2018-07-09T18:00:05.57 | 2018-07-09T18:01:54.59 | |
| 7 | 2018-07-10T04:41:19.07 | 2018-07-10T04:42:09.37 | 2018-07-10T04:41:18.84 | 2018-07-10T04:42:09.65 |
| [1] |
李德仁, 童庆禧, 李荣兴 , 等. 高分辨率对地观测的若干前沿科学问题[J]. 中国科学:地球科学, 2012,42(6):805-813.
[
|
| [2] |
谢榕, 刘亚文, 李翔翔 . 大数据环境下卫星对地观测数据集成系统的关键技术[J]. 地球科学进展, 2015,30(8):855-862.
[
|
| [3] |
周月敏, 周翔 . 中国高分辨率对地观测系统共性应用技术规范体系框架研究[J]. 地球信息科学学报, 2018,20(9):1298-1305.
[
|
| [4] |
|
| [5] |
胡雅斯, 孟新, 李立刚 . 适用多传感器的卫星对地覆盖计算模型[J]. 遥感技术与应用, 2009,24(4):537-542.
[
|
| [6] |
钟宇, 吴晓燕, 黄树彩 , 等. 红外预警卫星对地覆盖区域近似计算模型[J]. 系统工程与电子技术, 2014,36(11):2133-2137.
[
|
| [7] |
李冬, 唐容富, 易东云 . 对地观测卫星访问区域目标时间窗口快速算法[J]. 上海航天, 2010,27(3):1-5.
[
|
| [8] |
宋志明, 戴光明, 王茂才 , 等. 卫星对区域目标的时间窗口快速计算方法[J]. 计算机仿真, 2014,31(9):61-66.
[
|
| [9] |
张锦绣, 曹喜滨, 林晓辉 . 卫星过顶与成像区域时间的快速预报算法研究[J]. 哈尔滨工业大学学报, 2006,38(4):514-516,664.
[
|
| [10] |
沈欣, 李德仁, 姚璜 . 一种面向成像任务规划的光学遥感卫星成像窗口快速预报方法[J]. 武汉大学学报·信息科学版, 2012,37(12):1468-1471.
[
|
| [11] |
刘述民, 顾行发, 余涛 . 基于Web的资源卫星覆盖查询设计与仿真[J]. 计算机仿真, 2008,25(12):49-53.
[
|
| [12] |
张占月, 徐艳丽, 曾国强 . 基于STK的航天任务仿真方案分析[J]. 装备学院学报, 2006,17(1):48-51.
[
|
| [13] |
鄂智博, 李俊峰 . 遥感卫星对区域目标可见性的快速计算方法[J/OL]. 清华大学学报(自然科学版), 2019: 1-6.
[
|
| [14] |
左尧, 王少华, 钟耳顺 , 等. 高性能GIS研究进展及评述[J]. 地球信息科学学报, 2017,19(4):437-446.
[
|
| [15] |
卢万杰, 徐青, 蓝朝桢 , 等. 面向服务的空间态势信息系统的设计与实现[J]. 系统仿真学报, 2014,26(10):2452-2457.
[
|
| [16] |
韩蕾, 陈磊, 周伯昭 . SGP4/SDP4模型用于空间碎片轨道预测的精度分析[J]. 中国空间科学技术, 2004,24(4):65-71.
[
|
| [17] |
刁宁辉, 刘建强, 孙从容 , 等. 基于SGP4模型的卫星轨道计算[J]. 遥感信息, 2012,27(4):64-70.
[
|
| [18] |
|
| [19] |
|
| [20] |
陈祖刚, 杨雅萍 . 耦合尺度的地理实体空间相关度算法的建立与应用[J]. 地球信息科学学报, 2018,20(1):37-47.
[
|
| [21] |
成波, 关雪峰, 向隆刚 , 等. 一种面向时空对象及其关联关系动态变化表达的概念数据模型[J]. 地球信息科学学报, 2017,19(11):1415-1421.
[
|
| [22] |
孙怀英, 虞慧群, 范贵生 , 等. 大数据流计算环境下的低延时高可靠性的资源调度方法[J]. 华东理工大学学报(自然科学版), 2017,43(6):855-862.
[
|
| [23] |
李坚, 李德仁, 邵振峰 . 一种并行计算的流数据Delaunay构网算法[J]. 武汉大学学报·信息科学版, 2013,38(7):794-798.
[
|
| [24] |
|
| [25] |
马可, 李玲娟 . 分布式实时流数据聚类算法及其基于Storm的实现[J]. 南京邮电大学学报(自然科学版), 2016,36(2):104-110.
[
|
| [26] |
王铭坤, 袁少光, 朱永利 , 等. 基于Storm的海量数据实时聚类[J]. 计算机应用, 2014,34(11):3078-3081.
[
|
| [27] |
乔通 . 基于Storm的海量交通数据实时处理平台的研究[D]. 北京:北方工业大学, 2017: 9-17.
[
|
| [28] |
|
| [29] |
李德仁 . 我国第一颗民用三线阵立体测图卫星—资源三号测绘卫星[J]. 测绘学报, 2012,41(3):317-322.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}