
基于亮度补偿的遥感影像阴影遮挡道路提取方法
|
何惠馨(1993— ),女,浙江舟山人,硕士生,主要从事城市遥感。E-mail: hehx_sdut@163.com |
收稿日期: 2019-05-29
要求修回日期: 2019-07-23
网络出版日期: 2020-04-13
基金资助
国家重点研发计划项目(2017YFB0503500)
国家自然科学基金项目(41601478)
国家自然科学基金项目(41501425)
山东省高等学校科技计划项目(J16LH03)
山东理工大学青年教师发展支持计划项目(4072-115016)
版权
Extraction of Shaded Roads in High-Resolution Remote Sensing Imagery based on Brightness Compensation
Received date: 2019-05-29
Request revised date: 2019-07-23
Online published: 2020-04-13
Supported by
National Key Research and Development Program of China(2017YFB0503500)
National Natural Science Foundation of China(41601478)
National Natural Science Foundation of China(41501425)
Project of Shandong Province Higher Educational Science and Technology Program(J16LH03)
Young Teacher Development Support Program of Shandong University of Technology(4072-115016)
Copyright
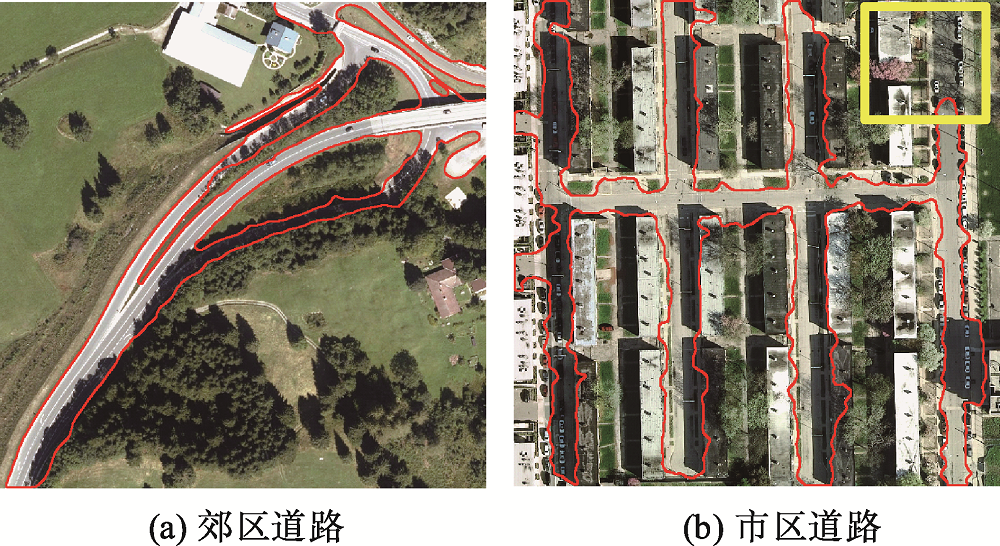
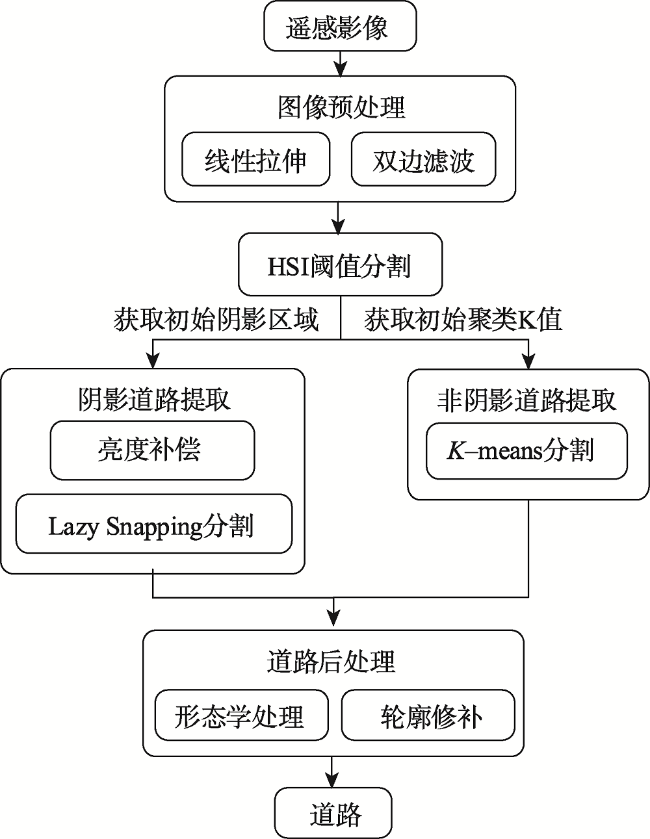
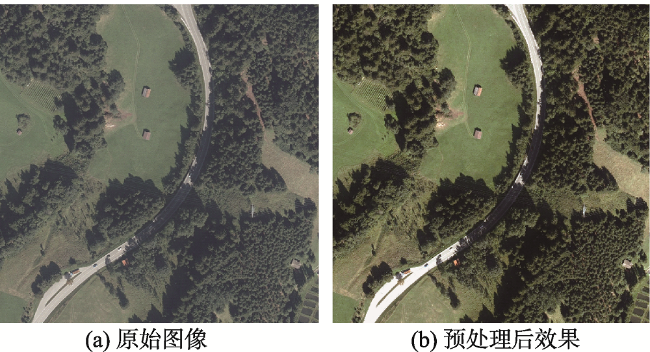
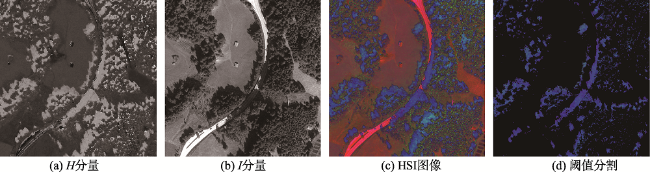
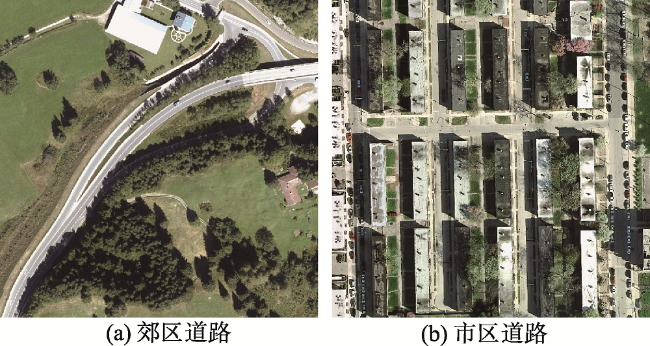
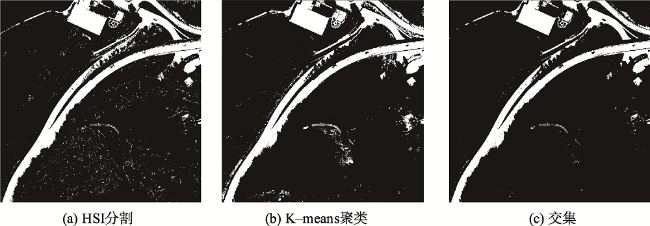
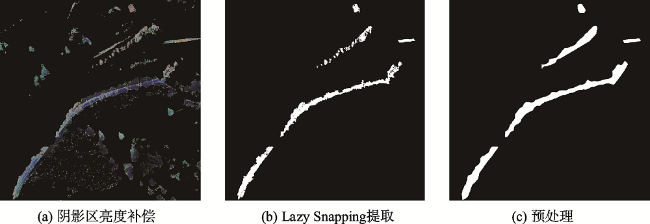
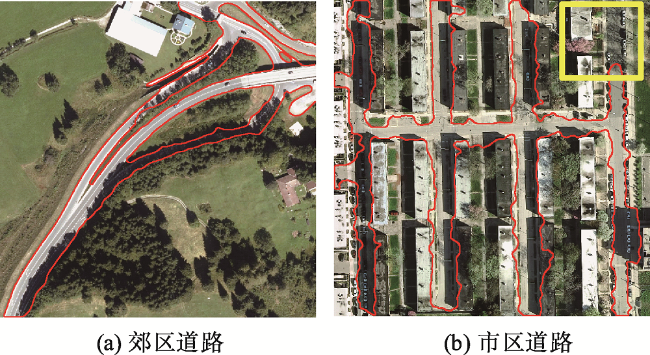
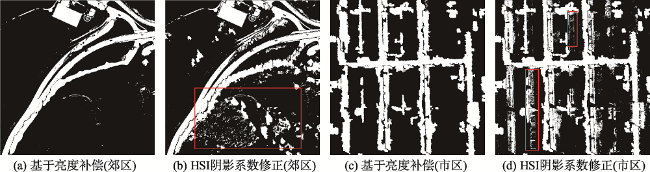
在基于高分辨率遥感影像的道路提取中,阴影遮挡是导致提取的部分或整段道路缺失的重要因素,严重制约了道路提取的自动化过程,因此探索适用性强的阴影情况下道路提取方法对地图数据生产和地理大数据研究具有重要意义。本文针对传统的阴影系数修正方法难以消除植被、建筑上的阴影对道路提取带来的干扰,选用路面颜色不一、地物干扰少的郊区影像与地物丰富、路面地物阴影干扰严重的市区影像开展研究,提出了基于亮度补偿的阴影遮挡道路的提取方法。首先,在图像预处理的基础上,利用HSI阈值分割获取阴影区域;其次,在削弱蓝色分量信息后采用亮度补偿方法实现像素点空间域增强以及阴影区信息的恢复,在增大道路面阴影与周围环境差异的基础上,借助高效的分割算法实现阴影道路提取;最后,通过和由K-means聚类分割获取的非阴影道路进行合并,经细化处理最终实现阴影遮挡道路的完整提取。实验结果表明,此方法提取郊区与市区影像中阴影道路的正确率在80%以上,该方法能有效地提取阴影遮挡道路,消除其他阴影的干扰,降低阴影道路提取时的斑块破碎度,较好的保留道路的主体。
何惠馨 , 范俊甫 , 陈文贺 , 周玉科 , 张鹏 , 俞宵 . 基于亮度补偿的遥感影像阴影遮挡道路提取方法[J]. 地球信息科学学报, 2020 , 22(2) : 258 -267 . DOI: 10.12082/dqxxkx.2020.190270
While extracting roads from high-resolution remote sensing imagery, shadow shielding is a main factor causing roads missing or defects, which could lead to difficulties for automatic road extraction. Therefore, developing methods for shaded road extraction with strong applicability has a great significance in map data production and research of geographical data. Traditional methods, such as the shadow coefficient amendment method, are difficult to remove the shadows of plants and buildings, and they would undermine the integrity of extracted roads. So, this paper proposed a feasible approach to extracting shaded roads based on brightness compensation and a high-performance segmentation method. First, after image preprocessing, a threshold segmentation method in HSI space was used to obtain the shadow area. Second, a combination of blue components suppression in the RGB space and divided linear strength was applied to enhance the pixel points in spatial domain and recover the information of the shaded areas, which made the difference between shaded roads and surrounding areas more obvious. Shaded roads were extracted by an efficient segmentation algorithm, and unshaded roads were calculated by K-means clustering segmentation. The initial value of clustering was based on color distribution in the HSI space. To ensure the integrity and details of extracted roads, the morphology method and contour repair algorithm were introduced into the extraction process after rough roads mergence. Results show that this method could extract shaded road successfully. For suburban roads, the integrity of extracted shaded roads was 96.84%. For urban roads, the accuracy was also higher than 80%. Compared with traditional methods based on the threshold segmentation in HSI, this method decreases the fragmentation of road patches while extraction, and keeps the integrity of the roads. This approach could be used for smart manufacturing and mapping of internet map data in high-resolution remote sensing imagery.
Key words: shadow shaded; road extraction; brightness compensation; HSI; K-means clustering
表1 道路提取效果评价指标Tab. 1 Evaluation of the shaded roads extraction results |
| 郊区道路 | 市区道路 | ||||
|---|---|---|---|---|---|
| 本文方法 | 传统方法 | 本文方法 | 传统方法 | ||
| TP/个 | 60 328 | 53 145 | 87 636 | 73 447 | |
| FN/个 | 1969 | 6640 | 23 107 | 37 296 | |
| FP/个 | 13 631 | 61 031 | 19 367 | 46 683 | |
| 完整率/% | 96.84 | 88.89 | 79.13 | 66.32 | |
| 正确率/% | 81.57 | 46.55 | 81.90 | 61.14 | |
| 检测质量/% | 79.45 | 43.98 | 67.36 | 46.65 | |
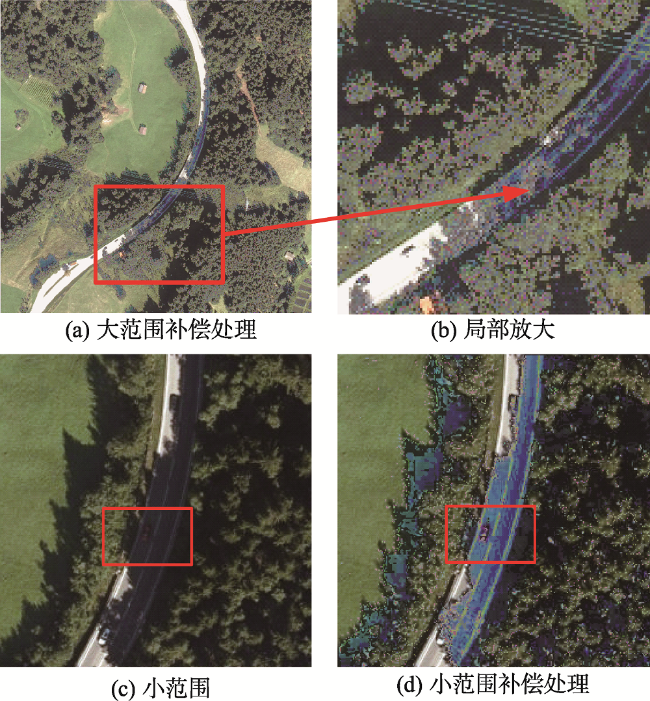
图11 基于亮度补偿的阴影道路提取结果Fig. 11 Result of shaded roads extraction based on the brightness compensation method |
| [1] |
郭杜杜 . 基于高分辨率卫星影像的城市道路阴影区域车辆信息提取研究[D]. 北京:北京交通大学, 2011.
[
|
| [2] |
|
| [3] |
|
| [4] |
方菊芹 . 遥感影像阴影检测与去除算法研究[D]. 成都:西南交通大学, 2014.
[
|
| [5] |
葛乐, 钟兴 . 基于阴影概率约束的遥感影像建筑物阴影检测[J]. 激光与光电子学进展, 2018,55(4):135-141.
[
|
| [6] |
杨俊, 赵忠明 . 基于归一化RGB色彩模型的阴影处理方法[J]. 光电工程, 2007(12):92-96.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
段志刚, 李勇, 王恩德 , 等. 基于光照不变图像的阴影图像道路及导航线提取算法[J]. 光学学报, 2016,36(12):206-213.
[
|
| [12] |
王峰萍, 王卫星, 薛柏玉 , 等. GVF Snake与显著特征相结合的高分辨率遥感图像道路提取[J]. 测绘学报, 2017,46(12):1978-1985.
[
|
| [13] |
洪绍轩, 赵业隆, 王伟轩 . 基于FCM与SVM相结合的高分辨率遥感影像道路提取[J]. 测绘与空间地理信息, 2018,41(11):147-150.
[
|
| [14] |
贺浩, 王仕成, 杨东方 , 等. 基于Encoder-Decoder网络的遥感影像道路提取方法[J]. 测绘学报, 2019,48(3):330-338.
[
|
| [15] |
汪夕明 . 遥感影像道路提取方法研究与实现[D]. 北京:清华大学, 2011.
[
|
| [16] |
|
| [17] |
Inria Aerial Image Labeling Dataset[EB/OL]. https://project.inria.fr/aerialimagelabeling/2018-10-14.
|
| [18] |
毛星云 . Opencv3编程入门[M]. 北京: 电子工业出版社, 2015.
[
|
| [19] |
王玉灵 . 基于双边滤波的图像处理算法研究[D]. 西安:西安电子科技大学, 2010.
[
|
| [20] |
高如新, 李雪颖 . 双边滤波的改进高光去除[J]. 中国图象图形学报, 2018,23(1):9-17.
[
|
| [21] |
|
| [22] |
王蜜蜂 . 遥感影像的阴影检测与补偿方法研究[D]. 西安:西安电子科技大学, 2011.
[
|
| [23] |
Wikipedia [EB/OL]. https://en.wikipedia.org/wiki/HSL_and_HSV2018-10-14.
|
| [24] |
邓林, 邓明镜, 张力树 . 高分辨率遥感影像阴影检测与补偿方法优化[J]. 遥感技术与应用, 2015,30(2):277-284.
[
|
| [25] |
|
| [26] |
陶中玉 . 交互式图像分割的相关算法研究及应用[D]. 成都:电子科技大学, 2016.
[
|
| [27] |
李娜娜, 谭靖 . 基于图论分割的图像去雾算法[J]. 地理空间信息, 2017,15(8):80-82,10.
[
|
| [28] |
|
| [29] |
苏玉雄 . 基于Graph Cut的图像前景提取[D]. 广州:华南理工大学, 2009.
[
|
| [30] |
|
| [31] |
黄玲玲 . 交互式抠图算法的研究及实现[D]. 成都:西南交通大学, 2015.
[
|
| [32] |
郭蓉 . 基于局部搜索和全局搜索的交互式图像分割方法[D]. 西安:陕西师范大学, 2016.
[
|
| [33] |
曹永春, 蔡正琦, 邵亚斌 . 基于K-means的改进人工蜂群聚类算法[J]. 计算机应用, 2014,34(1):204-207,217.
[
|
| [34] |
|
| [35] |
刘莉, 王刚, 翟登辉 . K-means聚类算法在负荷曲线分类中的应用[J]. 电力系统保护与控制, 2011,39(23):65-68,73.
[
|
| [36] |
周安发, 周家香 . 一种高分辨率遥感影像道路信息提取方法[J]. 遥感技术与应用, 2012,27(1):94-99.
[
|
| [37] |
冯彦铭, 谢家龙, 李林升 , 等. 基于八邻域跟踪算法的封闭区域几何尺寸测量[J]. 机械工程与自动化, 2013(6):170-171,173.
[
|
| [38] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}