
全息高精度导航地图: 概念及理论模型
|
余卓渊(1974— ),男,浙江常山人,博士,副研究员,主要从事大数据地图可视化技术、方法与系统研究。E-mail:yuzy@igsnrr.ac.cn |
收稿日期: 2019-11-04
要求修回日期: 2020-01-05
网络出版日期: 2020-06-10
基金资助
国家重点研发计划课题“全息地图数据获取与融合”(2017YFB0503501)
国家自然科学基金创新群体项目(41421001)
版权
Pan-information-based High Precision Navigation Map: Concept and Theoretical Model
Received date: 2019-11-04
Request revised date: 2020-01-05
Online published: 2020-06-10
Supported by
National Key Research and Development Program of China (Acquisition and Fu sion of Pan-InformationMap Data)(2017YFB0503501)
Science Fund for Creative Research Groups of the Nation al Natural Science Foundation of China(41421001)
Copyright
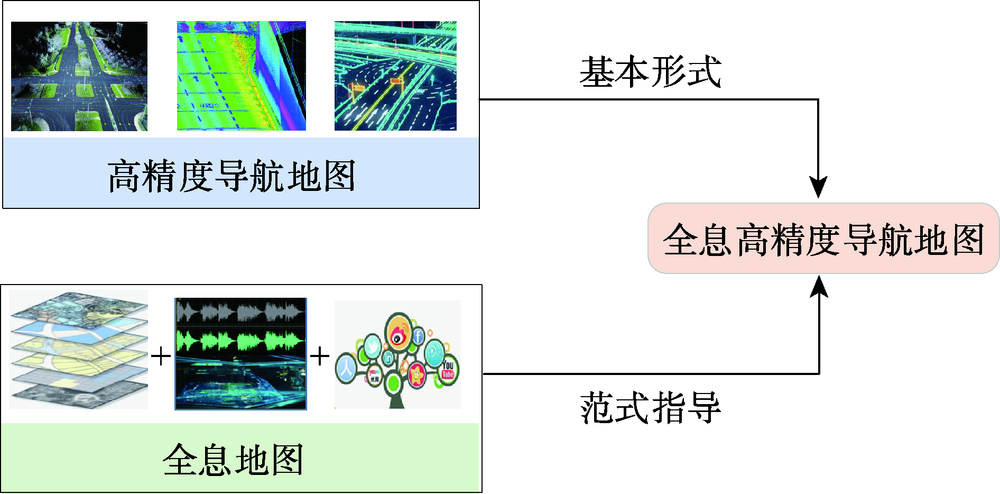
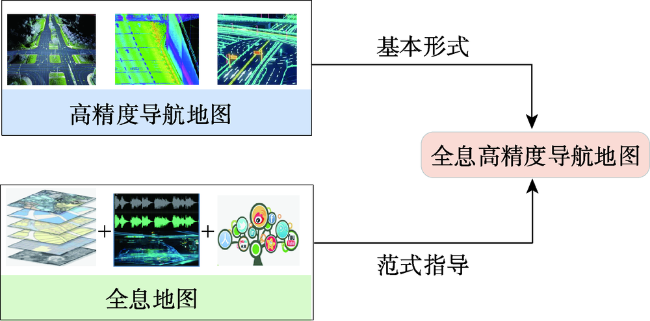
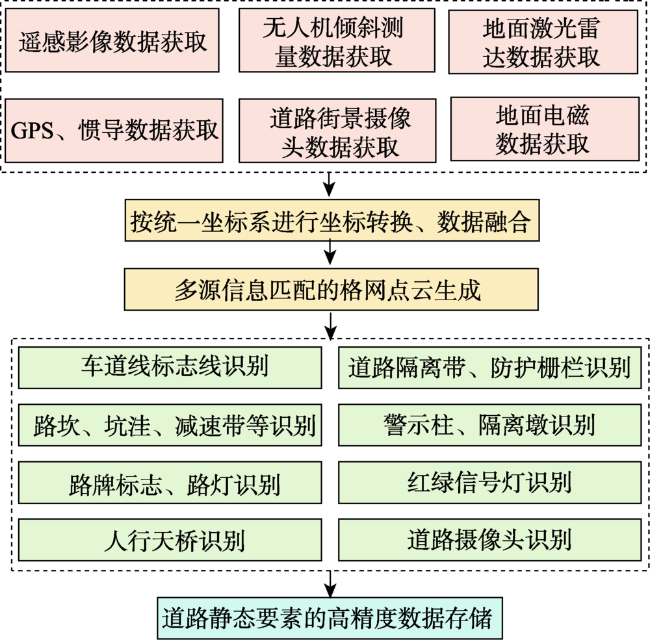
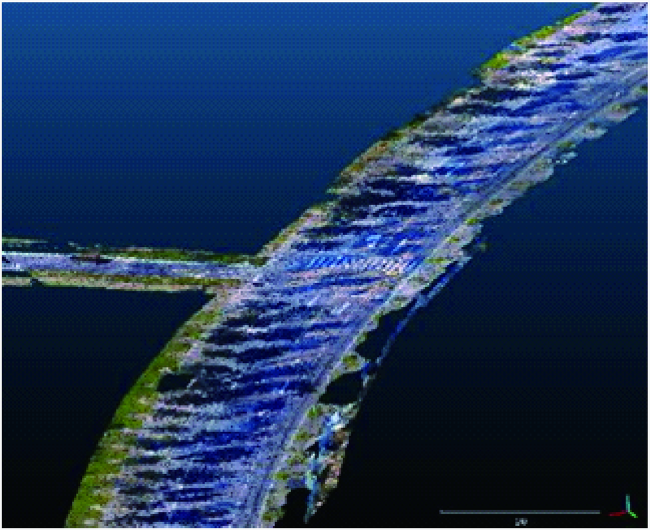
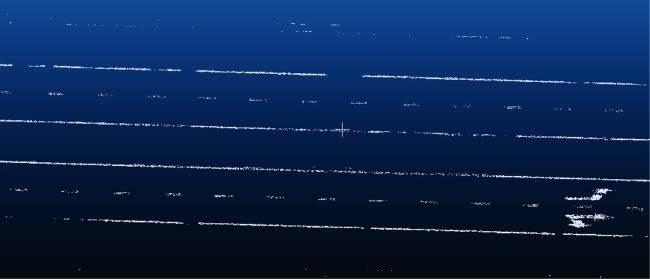
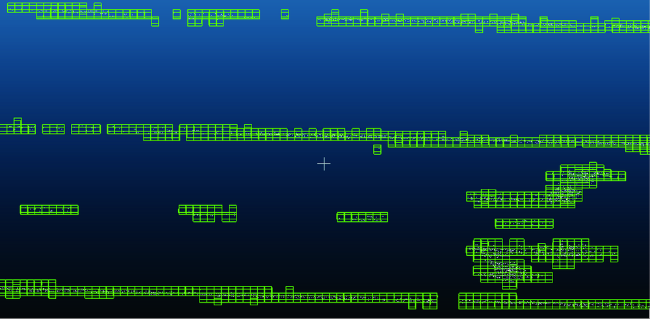
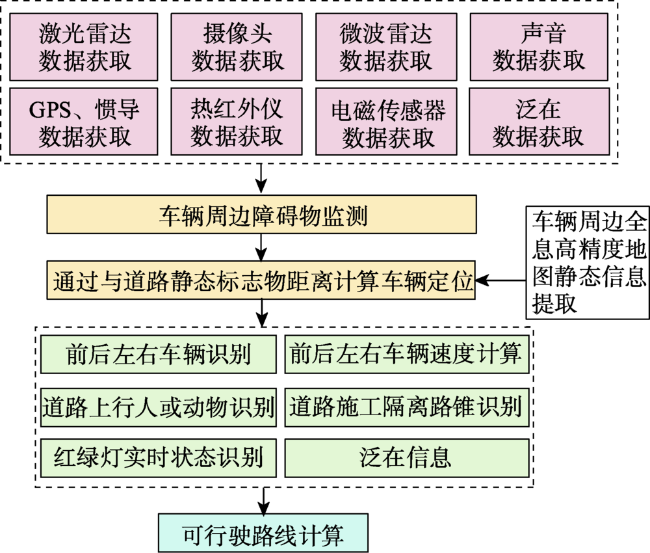
本文提出了全息高精度导航地图的概念,它融合了多源数据,尤其是电磁传感器、声音传感器、热红外仪等传感器数据,从更多角度为导航提供信息。在此概念基础上,提出了一种融合多源数据的全息高精度导航地图理论模型框架,该框架包含4个步骤:① 全息道路数据采集,包含道路三维彩色激光点云、遥感影像、无人机航拍倾斜测量数据、摄像头图像、热红外图像、声场信号、电磁场信号;② 道路静态信息提取,从上述采集信息提取和标记得到,如车道线、路坎、栏杆、路牌、路灯、隧道等,作为无人驾驶车辆规划基础路线和车辆位置定位的数据基础;③ 道路动态信息提取,从上述采集信息提取和标记得到,如离前后车辆的距离、前方有无行人、道路施工护栏、泛在信息等,作为检测无人驾驶车辆周围的实时道路环境和规划无人驾驶车辆行驶路线的依据;④ 动、静态信息融合:融合道路静态信息和道路动态信息,丰富道路信息,提高道路线精度,提高全息高精度导航地图更新的效率,为导航和无人驾驶车辆提供地图服务。
余卓渊 , 闾国年 , 张夕宁 , 贾远信 , 周成虎 , 葛咏 , 吕可晶 . 全息高精度导航地图: 概念及理论模型[J]. 地球信息科学学报, 2020 , 22(4) : 760 -771 . DOI: 10.12082/dqxxkx.2020.190648
Map is intelligent product of human civilization. The rapid development of science and technology increased the diversity and readability of map. Based on the existing concepts and forms of map, this paper developed a concept of pan-information-based high precision navigation map.This new map concept was a kind of intelligent navigation map which was oriented to vehicle mobile operation and integrated more functions, such as environment perception, pan-features fusion, high-precision positioning and planning decision-making. It can collect and fuse different information based on unified data model for different application fields, and it was a brand-new map form. Key innovation of this map was capturing and fusing pan-information of road from multi-source sensors, especially electromagnetic sensors, sound sensors, thermal infrared instruments and the others, in order to provide information for navigation from more aspects. Based on this concept, a theoretical model framework of pan-information-based high precision navigation map with multi-source data fusion was proposed. This framework consisted of four parts: (1) Pan-information road data collection. Data acquisition vehicles and other external sensors were used to collect multi-source data such as LiDAR system point cloud data, remote sensing images, oblique photogrammetric data, high-definition camera images, thermal infrared images, sound signal and electromagnetic signal. (2) Road static information extraction. Static information was basis for route planning and vehicle locating, which was obtained through the multi-source data mentioned above. The main road static information included lane lines, curbs, railings, road signs, road lamps, tunnels. (3) Road dynamic information extraction. Dynamic information was basis for real-time detecting surroundings and adjusting route of auto-vehicle, which was also obtained by extracting and marking the above collected data. The main road dynamic information included the distances between the vehicle and near objects, such as other cars, pedestrians and construction guardrails. Road dynamic information also included some ubiquitous information such as meteorological data, dynamic traffic conditions, POI data. (4) Fusion of dynamic and static information. Integrating road static information and road dynamic information can enrich road information, increase the accuracy of lane line, improve the updating efficiency of pan-information-based high precision navigation map,and provide map services for auto-driving vehiclesand its navigation. Compared with the existing map concepts and technologies, the map proposed in this paper has two characteristics: more detailed road information and more efficient data update, and both of the characteristics were based on our richer data sources, more diverse data collection methods and more efficient information extraction algorithms.
| [1] |
廖克 . 陈述彭院士的光辉业绩与学术思想永存——纪念陈述彭院士逝世一周年[J]. 地球信息科学学报, 2009,11(6):691-694.
[
|
| [2] |
陈述彭, 岳天祥, 励惠国 . 地学信息图谱研究及其应用[J]. 地理研究, 2000,19(4):337-343.
[
|
| [3] |
陈述彭 . 历史轨迹与知识创新[J]. 地理学报, 2001,56(7s):1-7.
[
|
| [4] |
张攀, 朱敦尧 . 车载导航地图服务发展探讨[J]. 交通信息与安全, 2013,31(5):127-130.
[
|
| [5] |
刘经南, 吴杭彬, 郭迟 , 等. 高精度道路导航地图的进展与思考[J]. 中国工程科学, 2018,20(2):99-105.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
曾妮红, 岳迎春, 黄迟 . 融合机载雷达和航空正射影像的道路提取[J]. 测绘科学, 2016,41(5):96-100.
[
|
| [10] |
李鑫慧, 郭蓬, 戎辉 , 等. 高精度地图技术研究现状及其应用[J]. 汽车电器, 2019(6):1-3.
[
|
| [11] |
|
| [12] |
陈贵宾 . 基于三维激光雷达的自动驾驶车辆高精度地图构建[D]. 长春:吉林大学, 2019.
[
|
| [13] |
申泽邦 . 面向自动驾驶的高精度地图优化和定位技术研究[D]. 兰州:兰州大学, 2019.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
王东波 . 高精度导航地图数据道路曲率估计方法研究[D]. 北京:北京建筑大学, 2018.
[
|
| [18] |
周勇, 刘尚魁 . 构建基于Appollo的高精度地图解决方案[J]. 电子技术与软件工程, 2018(21):139.
[
|
| [19] |
周成虎, 朱欣焰, 王蒙 , 等. 全息位置地图研究[J]. 地理科学进展, 2011,30(11):1331-1335.
[
|
| [20] |
齐清文, 姜莉莉, 张岸 , 等. 全息地图构建与多重表达[J]. 测绘科学, 2018,43(7):7-14.
[
|
| [21] |
朱欣焰, 杨龙龙, 呙维 , 等. 面向全息位置地图的室内空间本体建模[J]. 地理信息世界, 2015,22(2):1-7.
[
|
| [22] |
|
| [23] |
朱欣焰, 周成虎, 呙维 , 等. 全息位置地图概念内涵及其关键技术初探[J]. 武汉大学学报·信息科学版, 2015,40(3):285-95.
[
|
| [24] |
闾国年, 袁林旺, 俞肇元 . 地理学视角下测绘地理信息再透视[J]. 测绘学报, 2017,46(10):1549-1556.
[
|
| [25] |
闾国年, 俞肇元, 袁林旺 , 等. 地图学的未来是场景学吗?[J]. 地球信息科学学报, 2018,20(1):1-6.
[
|
| [26] |
周成虎 . 全空间地理信息系统展望[J]. 地理科学进展, 2015,34(2):129-131.
[
|
| [27] |
叶刚 . 城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究[D]. 北京:北京理工大学, 2016.
[
|
| [28] |
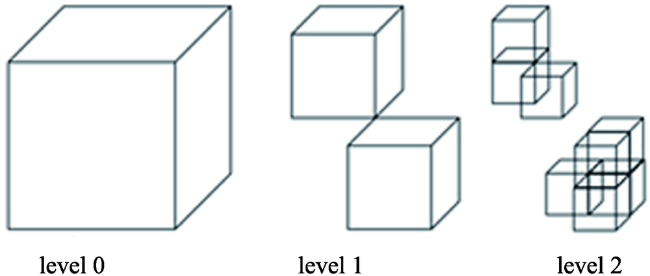
朱清海 . 一种基于八叉树车载激光点云的杆式地物批量提取方法[J]. 测绘通报, 2019(S2):110-111,116.
[
|
| [29] |
|
| [30] |
龚露鸣, 徐美华, 刘冬军 , 等. 基于混合高斯和HOG+SVM的行人检测模型[J]. 上海大学学报(自然科学版), 2018,24(3):341-351.
[
|
| [31] |
李权 . 面向安全监控的异常声音识别的研究[D]. 长沙:湖南师范大学, 2015.
[
|
| [32] |
康健 . 城市声环境论[M]. 北京: 科学书版社, 2011.
[
|
| [33] |
刘经南, 詹骄, 郭迟 , 等. 智能高精地图数据逻辑结构与关键技术[J]. 测绘学报, 2019,48(8):939-953.
[
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}