
基于边云协同的AR空间分析计算框架
|
别勇攀(1996— ),男,湖北天门人,硕士生,研究方向为地理数据AR可视化、城市计算。E-mail: yongpanbie@cug.edu.cn |
收稿日期: 2019-08-27
要求修回日期: 2019-11-29
网络出版日期: 2020-08-25
基金资助
国家自然科学基金项目(41671408)
国家自然科学基金青年基金项目(41801306)
国家自然科学基金青年联合基金项目(U1711267)
湖北省自然科学基金杰出青年项目(2017CFA041)
版权
A Framework for AR Spatial Analysis based on Edge-Cloud Integration
Received date: 2019-08-27
Request revised date: 2019-11-29
Online published: 2020-08-25
Supported by
National Natural Science Foundation of China(41671408)
Youth Fund Project of National Natural Science Foundation of China(41801306)
Youth joint fund project of National Natural Science Foundation of China(U1711267)
Natural Science Fund of Hubei Province(2017CFA041)
Copyright
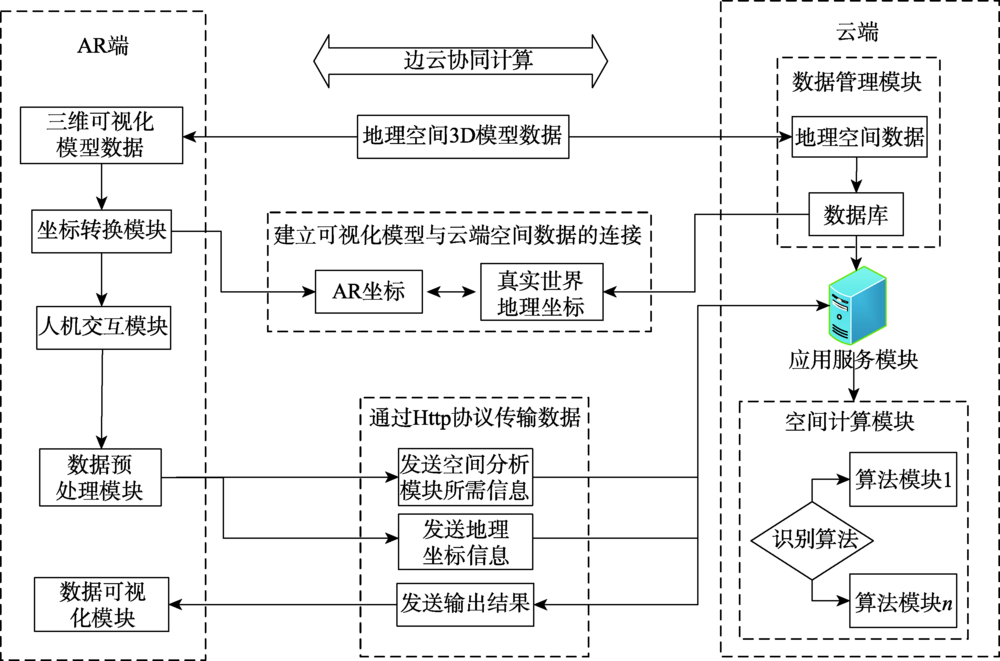
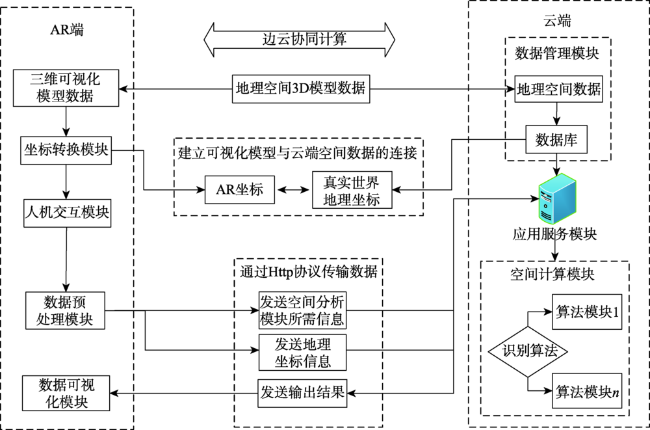
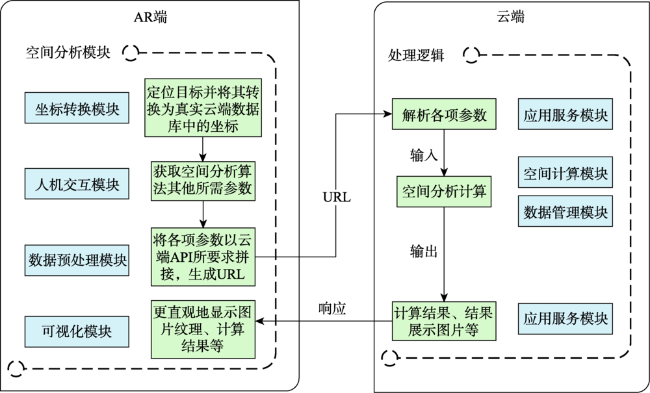
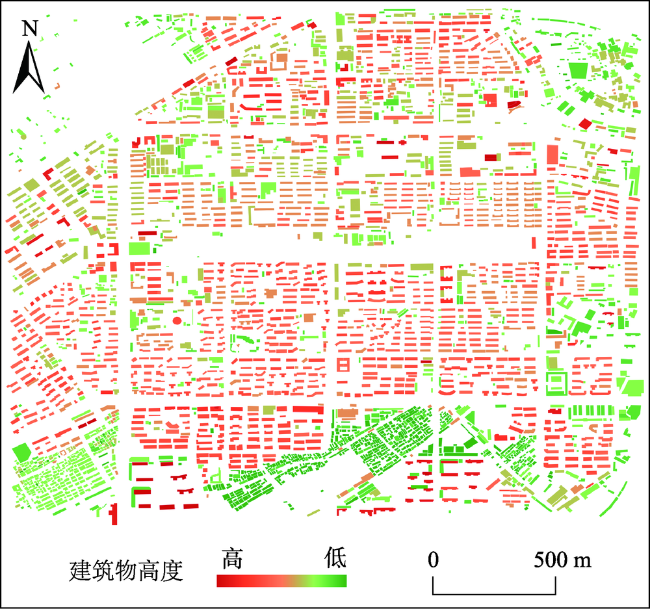
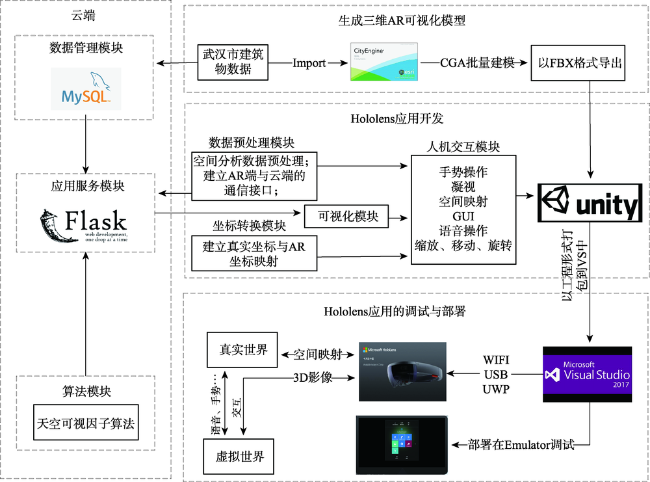
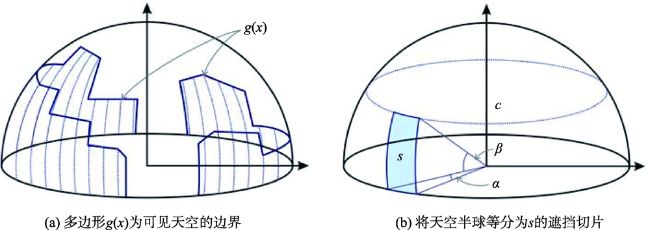
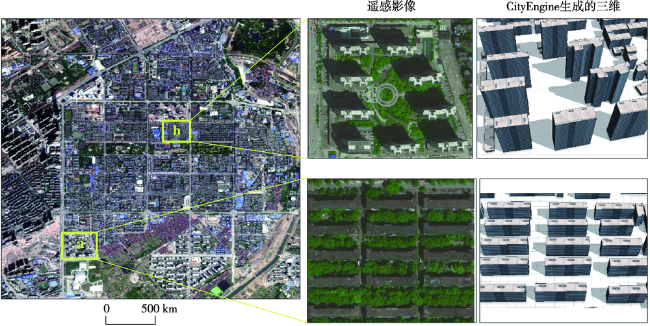
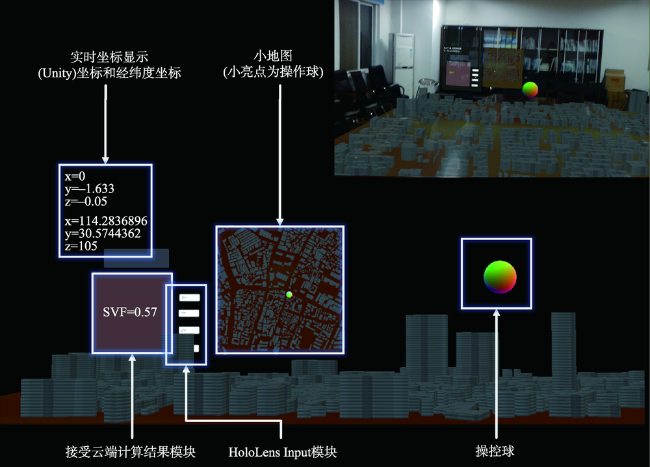
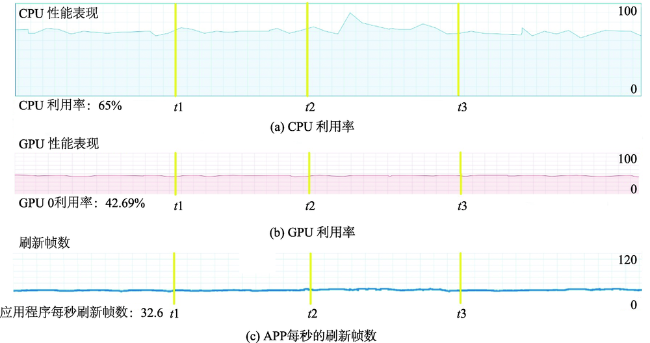
地理数据的增强现实(AR)技术,是地理信息可视化的重要发展方向之一。受限于头戴式AR设备有限的计算能力,已有的地理信息AR研究多集中于地理信息的可视化,并未提供复杂的空间分析计算功能。本文提出了一套基于边缘计算与云计算协同的AR空间分析计算框架。AR端完成空间数据的可视化、人机交互、数据预处理等;云端则完成复杂的空间分析计算任务以及空间数据的持久化存储;边云二元存储方法和三维可视化模型-三维地理模型间的坐标转换模块完成AR端和云端间的高效链接;从而达到高效率的、端对端的协同计算。基于该框架,本文利用头戴式AR设备Hololens,并基于武汉市的建筑物三维数据和天空可视因子算法,实现了在AR可视化的同时进行复杂的空间计算。结果表明,在保证空间分析计算效率和精度的同时,Hololens性能表现稳定,三维空间可视化的体验良好(FPS约35),证明了边云协同框架下的AR在空间分析计算具有广阔前景。
别勇攀 , 关庆锋 , 姚尧 . 基于边云协同的AR空间分析计算框架[J]. 地球信息科学学报, 2020 , 22(6) : 1383 -1393 . DOI: 10.12082/dqxxkx.2020.190472
Augmented Reality (AR) for geographic data is an important development direction of geographic information visualization. In recent years, some geographic studies have begun to use head-wear AR devices to visualize geographic data, making geographic spatial information more fully expressed. However, due to the limited computing power of head-wear AR devices, most of existing geographic information AR studies focus on the visualization of geographic information, yet do not provide complex spatial analysis and computation functions. This paper presents a framework for spatial analysis on AR devices by edge-cloud integration. In order to achieve efficient and end-to-end collaborative computation, the AR device is responsible for spatial data visualization, human-computer interaction, and data preprocessing; while the cloud server is responsible for complex spatial analysis tasks and persistent storage of spatial data. The binary storage method of edge-cloud and the coordinate conversion module between the 3D visualization model and the 3D geographic model provide efficient links between AR end and cloud end. Specifically, the framework divides three-dimensional geospatial data into three-dimensional AR visualization model data and three-dimensional geographic model data with attribute information, which are stored in AR and the server, respectively. The coordinates of the three-dimensional AR visualization model and geospatial coordinates are mapped using Bursa-wolf seven-parameter coordinate transformation method. Finally, HTTP protocol is used to transmit data to achieve high efficiency and end-to-end collaborative computing. Based on this framework, this paper used Hololens, a head-mounted AR device, and based on three-dimensional building data in Wuhan and a sky visibility factor algorithm, to realize complex spatial computation in the meantime of AR visualization. The findings suggest that our framework can provide smooth and stable 3D visualization (FPS was about 35) while guaranteeing the efficiency and accuracy of the complex sky-view factor computation. In conclusion, the edge-cloud integration technology can enable AR devices to perform complex spatial analysis and computation.
表1 AR端与云端数据内容差异Tab. 1 Differences between AR data and cloud data |
| AR端数据 | 云端数据 | |
|---|---|---|
| 坐标系 | AR本地坐标 | 地理坐标 |
| 属性信息 | 无 | 有 |
| 空间信息 | 方向关系 | 方向关系、距离关系、拓扑关系 |
表2 AR端实验开发环境Tab. 2 Development environment of AR for experiments |
| 类型 | 详细信息 |
|---|---|
| 硬件环境 | 处理器:Intel Xeon E5-1630 v4 内存:64 GB 储存容量:3 TB 显卡:Nvidia GeForce GTX 1080 Ti显存:GDDR4 11GB |
| 软件环境 | 操作系统:Windows 10 专业版 64位 City Engine 2016.0 Visual Studio 2017 Community Unity 2017.2.1f1 (64-bit)、MixedRealityToolkit |
表3 云端实验开发环境Tab. 3 Development environment of cloud for experiments |
| 类型 | 详细信息 |
|---|---|
| 硬件环境 | 处理器:Intel Xeon E5-1630 v4 内存:64 GB 储存容量:3 TB |
| 软件环境 | 操作系统:Windows 10 专业版 64位 Python 3.6、Flask 0.12.2 MySQL 5.7、Redis 3.0 Qt 5.10 |
表4 边云协同框架下SVF计算结果精度Tab. 4 Accuracy of SVF calculation based on the edge-cloud integration framework |
| R2 | MSE | MAE | |
|---|---|---|---|
| SVF计算结果 | 0.998 | 0.00002 | 0.00293 |
| [1] |
|
| [2] |
|
| [3] |
龚建华. 地学三维可视化[J].地球信息科学学报,1996(2):34-37.
[
|
| [4] |
吴立新, 史文中,
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
陈科, 黄天勇, 杨林波, 等. AR技术在 GIS 可视化中的应用及方法研究[J]. 测绘与空间地理信息, 2011,34(6):98-101.
[
|
| [9] |
|
| [10] |
杜清运, 刘涛. 户外增强现实地理信息系统原型设计与实现[J]. 武汉大学学报·信息科学版, 2007,32(11):1046-1049.
[
|
| [11] |
常勇, 施闯. 基于增强现实的空间信息三维可视化及空间分析[J]. 系统仿真学报, 2007,19(9):1991-1995.
[
|
| [12] |
|
| [13] |
|
| [14] |
边缘计算与云计算协同应用将大数据分析推向新高度[J]. 中国安防, 2018,149(4):66-72.
[ Collaborative application of Edge computing and Cloud computing pushes big data analysis to a new level[J]. China Security & Protection, 2018,149(4):66-72. ]
|
| [15] |
闻平, 王冲, 吴小东, 等. FBX 三维模型自动转换为OBJ三维模型方法研究[J]. 测绘与空间地理信息, 2016,39(1):113-115.
[
|
| [16] |
|
| [17] |
|
| [18] |
吕永来, 李晓莉. 基于CityEngineCGA的三维建筑建模研究[J].测绘,2013(2):91-94.
[
|
| [19] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}