
基于卫星高光谱遥感影像的浅海水深反演方法
|
张源榆(1998— ),男,广西北海人,主要从事珊瑚礁遥感研究。E-mail:zhangyuanyu2009@163.com |
收稿日期: 2019-07-20
要求修回日期: 2019-11-27
网络出版日期: 2020-09-25
基金资助
国家自然科学基金项目(41766007)
广西科技计划项目(AD17129063)
广西创新驱动发展专项(AA17204074)
广西创新驱动发展专项(AA18118038)
广西自然科学基金项目(2016GXNSFBA380031)
版权
Estimation of Shallow Water Depth based on Satellite Hyperspectral Images
Received date: 2019-07-20
Request revised date: 2019-11-27
Online published: 2020-09-25
Supported by
National Natural Science Foundation of China(41766007)
Guangxi Scientific Projects(AD17129063)
Guangxi Innovative Development Grand Grant(AA17204074)
Guangxi Innovative Development Grand Grant(AA18118038)
Natural Science Foundation of Guangxi, China(2016GXNSFBA380031)
Copyright
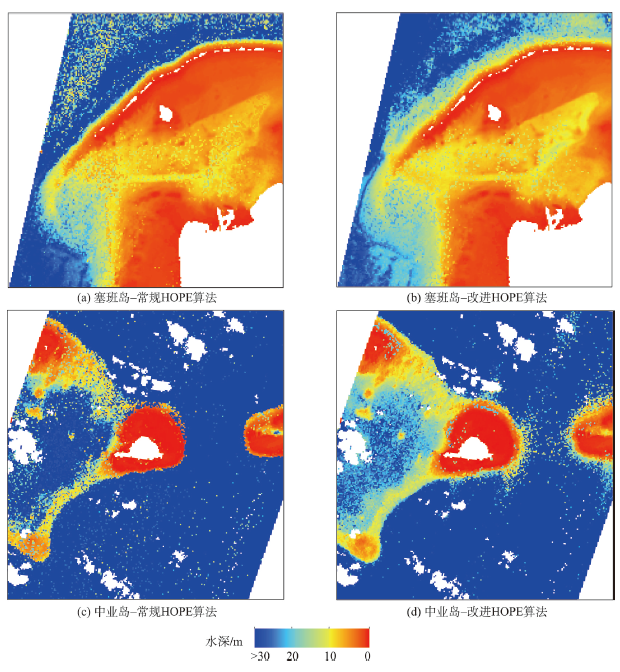
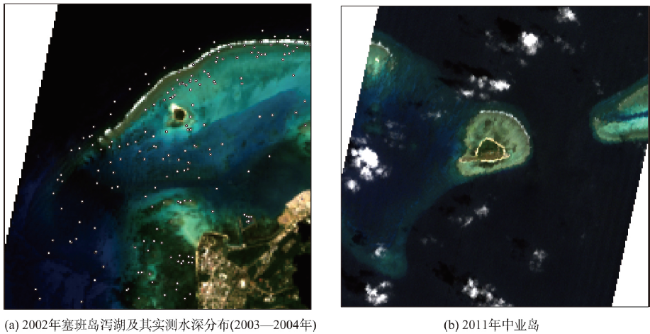
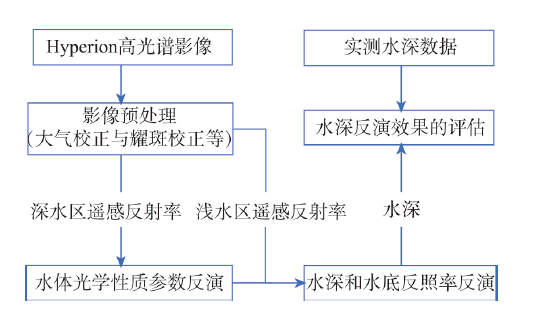
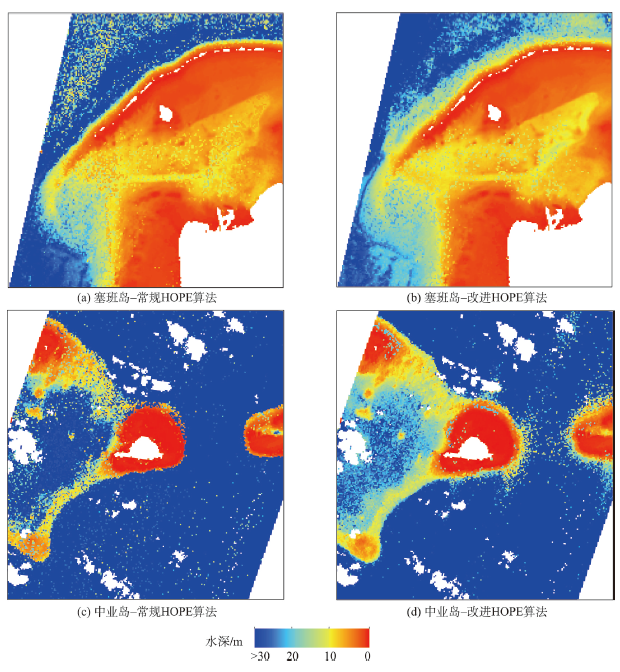
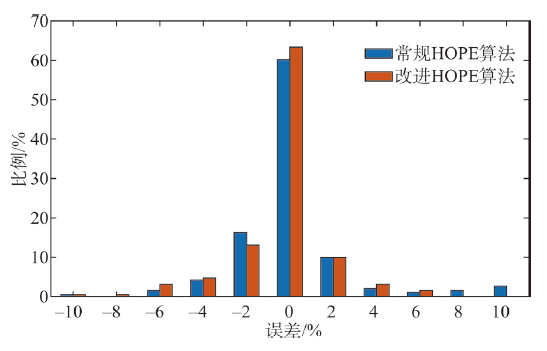
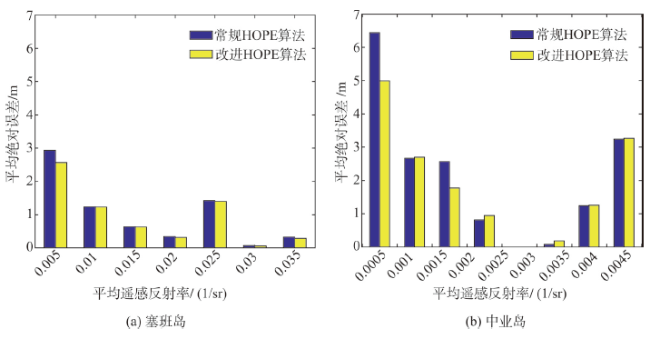
遥感水深反演具有非接触测量和省时省力等优点,能够为航海、岛礁工程与珊瑚礁生态调查等活动提供重要参考。随着高光谱遥感卫星数量的增长,基于高光谱遥感影像的水深反演具有良好的发展与应用潜力。HOPE(Hyperspectral Optimization Process Exemplar)算法是比较常用的高光谱水深反演算法。鉴于HOPE算法在低遥感反射率海域会出现水深被高估的问题,本文基于Hyperion高光谱遥感影像提出一种改进的水深反演算法。该算法针对危险或难以到达海域往往具有水体光学性质较为均一的特点,利用深水区遥感反射率的观测值来估计整个研究区域内的水体光学性质参数并将其固定,以便减少未知参数数量,解决水深被高估的问题,最终达到提高水深反演整体精度的目的。塞班岛和中业岛的实验结果表明,改进算法能够有效克服常规HOPE算法在低遥感反射率水域高估水深的问题。改进算法能够将平均遥感反射率小于0.0075sr-1(塞班岛)和0.001 sr-1(中业岛)范围内的水域的水深反演平均绝对误差从常规HOPE算法的2.94 m和6.44 m分别降低至2.56 m和4.99 m,从而能够相应地将整体的均方根误差从3.18 m和5.39 m分别降低至2.30 m和3.32 m,而将整体的平均相对误差从32.4%和27.1%分别降低至30.6%和23.9%。因此,改进算法在提高卫星高光谱遥感影像水深反演效果方面具有可行性和有效性。
张源榆 , 黄荣永 , 余克服 , 樊明顺 , 周国清 . 基于卫星高光谱遥感影像的浅海水深反演方法[J]. 地球信息科学学报, 2020 , 22(7) : 1567 -1577 . DOI: 10.12082/dqxxkx.2020.190387
Shallow water depth estimation with remote sensing images can provide significant reference values in navigation, construction of reef islands, and investigation of coral reef ecosystems. It is a convenient, time-saving, and non-contact way to detect the depth of shallow water areas. With a growing number of hyperspectral satellites, many shallow water depth estimation algorithms using satellite hyperspectral images have been proposed. One of the mostly used is the Hyperspectral Optimization Process Exemplar (HOPE) algorithm.The algorithm is implemented by searching for the unknown parameters of the Semi-Analytic Radiative Transfer Model, including water depths, water optical properties,and the bottom albedo with a nonlinear optimization approach. However, the HOPE algorithm tends to overestimate water depths for areas with low remote sensing reflectance. To help address thisproblem, we proposed an improved HOPE algorithm based on Hyperion satellite hyperspectral images. The improved HOPE algorithm makes use of the characteristic that the properties of the water column are homogeneous: (1) According to the Semi-Analytic Radiative Transfer Model, the remote sensing reflectance of the optical deep water only depends on the optical properties of the water column, thus the HOPE algorithm is simplified to only estimate the optical properties of the water column with the remote sensing reflectance observations of the deep water; (2) The estimated optical properties are then used as the optical properties of the water column of the entire study area so that the shallow water depths can be easily estimated by solving the Semi-Analytic Radiative Transfer Model with only the water depth and the bottom albedo unknown. The purpose is to reduce the number of the unknowns in the traditional HOPE algorithm and to mitigate the overestimation problem. The improved HOPE algorithm was validated by comparison with the traditional HOPE algorithm based on the Hyperion hyperspectral images of two study sites: Saipan Island and Zhongye Island. For the areas with low average remote reflectance, i.e. 0~0.0075sr-1 for Saipan Island and 0~0.001 sr-1for Zhongye Island, the mean absolute errors in water depth estimation achieved by the traditional algorithm were2.94m and 6.44 m, respectively. The errors were reduced to 2.56 m and 4.99 m by using the proposed algorithm. As a result, the Root Mean Square Error (RMSE) and the Mean Relative Error (MRE) were reduced from 3.18 m and 32.4% to 2.30 m and 30.6% for Saipan Island; and from 5.39 m and 27.1% to 3.32 m and 23.9% for Zhongye Island. Our findings suggest that the improved HOPE algorithm is feasible and effective in improving the accuracy of the shallow water depth estimation and has good potentialfor future applications.
Key words: hyperspectral; shallow water; coral reefs; waterdepth; radiation transmission; Hyperion
表1 最小化过程未知参数初值、上限与下限的设置Tab. 1 Initial values, upper bounds, and lower bounds of the unknowns in the minimization process |
| 变量 | 初始值 | 下限 | 上限 |
|---|---|---|---|
| P/m-1 | 0.003 | 0.6 | |
| G/m-1 | 0.001 | 0.6 | |
| X/m-1 | 0.001 | 0.01 | |
| B | 0.01 | 0.8 | |
| H/m | 0.1 | 40 |
表2 塞班岛不同水深范围的水深反演误差统计表Tab. 2 Statistics of the errors of the estimated water depths of SaipanIsland in different depth intervals |
| 算法 | 水深范围/m | MAE/m | RMSE/m | MRE/% |
|---|---|---|---|---|
| 改进HOPE 算法 | 0~5 | 0.54 | 0.88 | 36.5 |
| 5~15 | 2.10 | 2.72 | 21.7 | |
| >15 | 4.42 | 5.49 | 22.5 | |
| 常规HOPE 算法 | 0~5 | 0.56 | 0.83 | 36.3 |
| 5~15 | 2.27 | 3.00 | 23.2 | |
| >15 | 7.33 | 9.10 | 38.1 |
感谢美国国家海岸带海洋科学中心(NCCOS,https://coastalscience.noaa.gov/)提供的塞班岛实测水深数据;感谢美国海洋产品与服务中心(COOPS,https://tidesandcurrents.noaa.gov/)提供的塞班岛潮位数据;感谢美国地质调查局(USGS,https://earthexplorer.usgs.gov/)提供的Hyperion卫星高光谱遥感影像;感谢英国纽卡斯尔大学工程学院王政博士对英文摘要的修改。
| [1] |
苏奋振, 杜云艳, 裴相斌, 等. 中国数字海洋构建基准与关键技术[J]. 地球信息科学学报, 2006,8(1):12-20.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
李丽. 基于WorldView-2数据的西沙群岛遥感水深反演——以赵述岛和南岛为例[J]. 国土资源遥感, 2016,28(4):170-175.
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
刘振, 胡连波, 贺明霞. 卫星高光谱数据反演南沙岛礁区海域浅海水深和光学参数[J]. 中国海洋大学学报, 2014,44(5):101-108.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
Earth explorer[EB/OL]. https://earthexplorer.usgs.gov/.
|
| [26] |
National Centers for Coastal Ocean Science[EB/OL]. https://coastalscience.noaa.gov/.
|
| [27] |
Tides and currents[EB/OL]. https://tidesandcurrents.noaa.gov/.
|
| [28] |
|
| [29] |
OSU Tidal Inversion Software[CP]. http://volkov.oce.orst.edu/tides/.
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
Moderate Resolution Imaging Spectroradiometer[EB/OL]. https://modis.gsfc.nasa.gov/.
|
| [36] |
|
| [37] |
周雨霁, 田庆久. EO-1 Hyperion高光谱数据的质量评价[J]. 地球信息科学学报, 2008,10(5):278-283.
[
|
| [38] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}