
黑臭水体水面阴影提取的自适应阈值算法研究
|
许佳峰(1995— ),男,浙江嘉兴人,硕士生,主要从事水环境遥感研究。E-mail:516787702@qq.com |
收稿日期: 2019-09-04
要求修回日期: 2019-12-10
网络出版日期: 2020-12-25
基金资助
国家重点研发计划项目(2017YFB0503902)
版权
Adaptive Threshold for Surface Shadow Detection of Black and Odor Water
Received date: 2019-09-04
Request revised date: 2019-12-10
Online published: 2020-12-25
Supported by
National Key Research and Development Program of China(2017YFB0503902)
Copyright
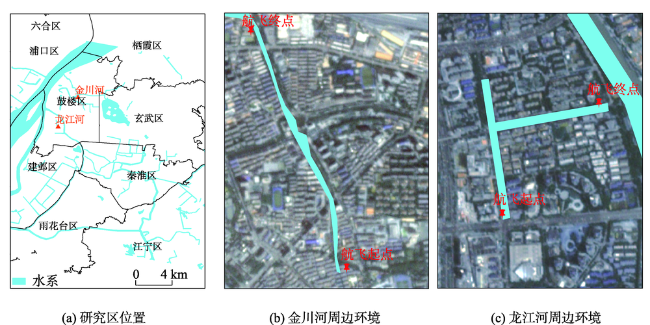
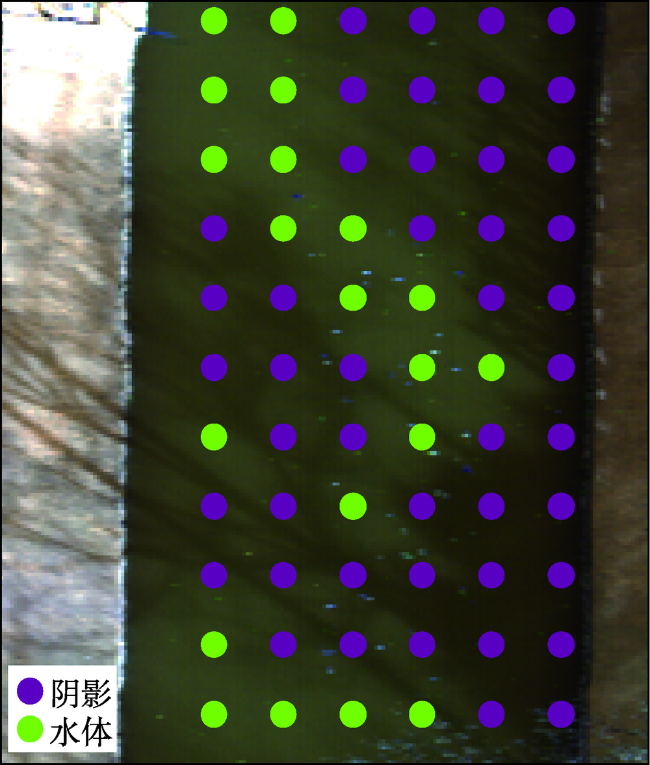
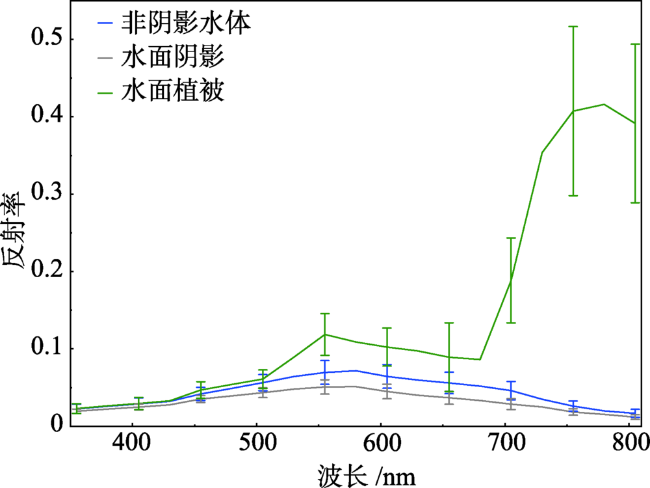
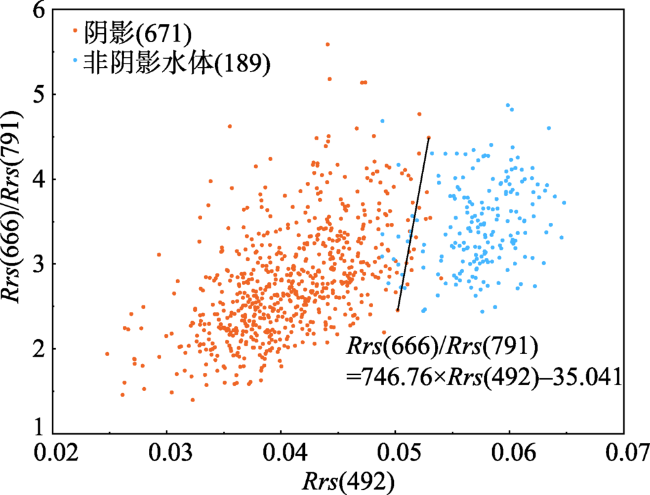
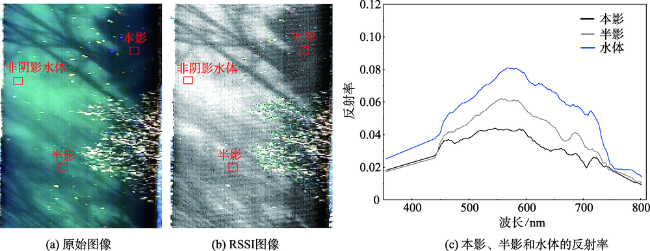
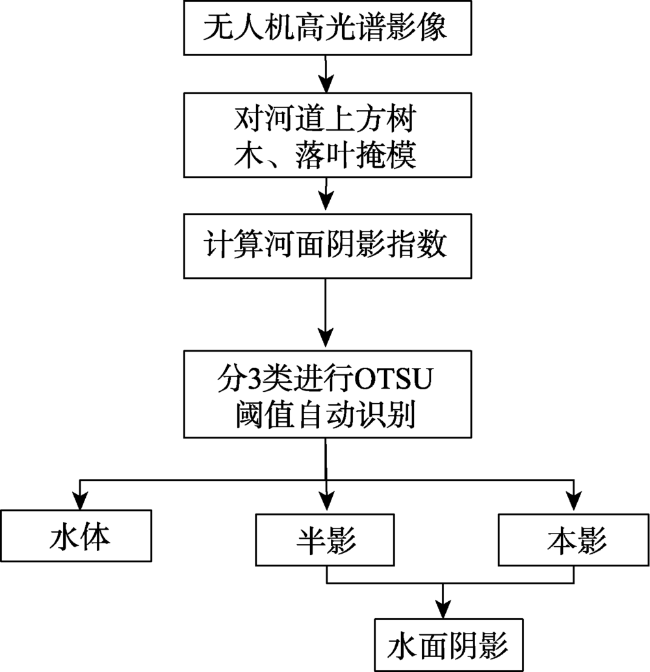
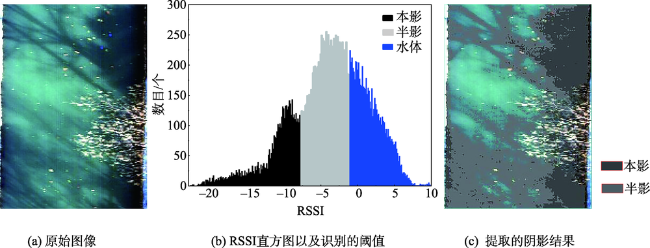
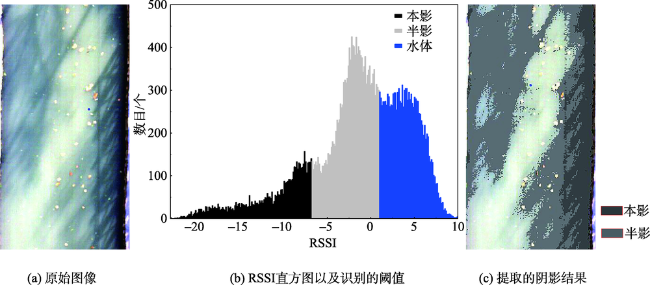
黑臭水体水面阴影对水面光谱信息产生干扰,严重地影响了利用高空间分辨率遥感数据进行水质状况监测的精度,因此,在数据预处理中必须进行阴影剔除。本研究基于无人机高光谱遥感数据,通过分析各种波段组合下黑臭水体水面的阴影像元和水体像元的光谱特征空间,选择以492、666和792 nm处的反射率建立黑臭水体的河面阴影指数(RSSI),并利用最大类间方差法(OTSU)自动确定划分本影、半影以及水体的阈值。利用南京金川河和龙江河的无人机高光谱遥感影像对算法进行测试,结果表明:RSSI阴影指数能突出显示阴影与水体的差异;OTSU自适应确定的阈值能较好地区分本影、半影和水体,阴影的总体识别精度达到85%以上。该算法能够有效地识别黑臭水体水面阴影,为后续开展水体的定性、定量遥感监测提供数据预处理的技术支持。

许佳峰 , 李云梅 , 徐杰 , 雷少华 , 毕顺 , 周玲 . 黑臭水体水面阴影提取的自适应阈值算法研究[J]. 地球信息科学学报, 2020 , 22(10) : 1959 -1970 . DOI: 10.12082/dqxxkx.2020.190489
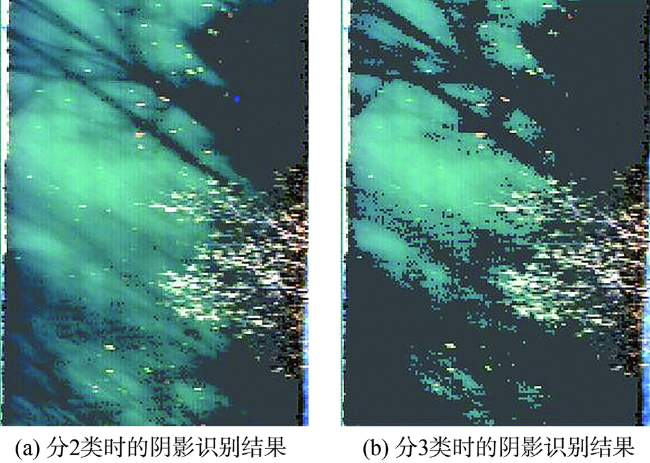
The shadow on black and odor water interfere with the spectral information of the water surface and seriously affects the accuracy of water quality monitoring with high spatial resolution remote sensing data. Therefore, it is necessary to remove the shadow before evaluating river water quality. This paper tries to constructan objective and efficient shadow recognition algorithm on black and odor water to reduce the interference of adjacent object and improve the accuracy of remote sensing monitoring and evaluation of river water quality. In this study, the shadow and water pixels were sampled based on the hyperspectral remote sensing data of Unmanned Aerial Vehicle (UAV).The spatial distribution of different band combinations was analyzed by means of spectral feature spatial analysis to obtain spectral band combinations that can effectively distinguish water and water surface shadows, and the coefficients of band combinations were calibrated to obtain the best discrimination effect. By comparing the discernibility of shadow and non-shadow water by various band combinations, it was found that the ration of remote sensing reflectance Rrs(666)/Rrs(791) combining with Rrs(492) has a higher discrimination between water pixels and shadow pixels. Therefore, remote sensing reflectance at 492 nm, 666 nm and 792 nm were selected to establish the River Surface Shadow Index (RSSI). In general, the threshold of distinguishing shadow and non-shadow pixels needs to be adjusted according to different images. In this case, manually adjusting the threshold may produce errors, which are difficult to apply to other images. In order to reduce the error caused by artificial threshold calibration, the maximum category variance method (OTSU)was adopted to automatically determine the threshold of shadow recognition. According to the complexity of the riverbank object, the reflectance spectra of the shadows were classified to two types: umbra and penumbra. The magnitude difference between penumbra and umbra reflectance was similar to that between penumbra and water reflectance. Therefore, in order to highlight the difference between penumbra and water, the number of classification recognition types was set as 3. Firstly, the OTSU method was used to automatically determine the recognition threshold of umbra, penumbra and water, and then the extracted umbra and penumbra were combined to produce the final shadow distribution map. The algorithm was tested by using the hyperspectral remote sensing images of Jinchuan River and Longjiang River in Nanjing. The results show that the RSSI shadow index can highlight the difference between shadow and water. The threshold determined by OTSU adaptively can better distinguish umbra, penumbra and water, and the overall recognition accuracy of shadow can reach more than 85%. This algorithm can effectively identify the water surface shadow on black and odor water and provide the technical support of data preprocessing for the subsequent qualitative and quantitative remote sensing monitoring for water.
表1 主要仪器设备技术参数Tab. 1 Main technical parameters of the instrument and equipment |
| 序号 | 仪器设备名称 | 主要技术指标 |
|---|---|---|
| 1 | 大疆M600 pro多旋翼 无人机 | 旋翼数量:6个 轴距:1133 mm 起飞重量:15.5 kg 最大载荷:6 kg 最大水平飞行速度:65 km/h(无风环境) 最大续航时间:60 min(空载)18 min (5.5 kg载重) 实用升限:4500 m |
| 2 | ZK-VNIR-FPG480机 载高光谱 成像仪 | 光谱范围:400~1000 nm 光谱分辨率:2.8 nm 光谱通道数:270个 空间通道数:480个 空间分辨率:0.08 m(120 m高度) (35 mm镜头) 视场角:26° A/D转换:12 bits 最大帧频:100 fps 数据接口:GigE 最大功耗:20 W 外形尺寸:310×87×87 mm 重量:2.2 kg 成像方式:采用外置推扫连续成像,采集画幅无限制,扫描路线一次成图,影像无畸变 |
表2 各个测试场景的精度评价Tab. 2 Accuracy evaluation of each test scenario |
| 区域 | 生产者精度 | 用户精度 | 总体精度 | Kappa系数 | ||||
|---|---|---|---|---|---|---|---|---|
| 测试场景1 | 85.27 | 82.89 | 93.25 | 67.00 | 86.89 | 0.83 | ||
| 测试场景2 | 89.57 | 82.26 | 89.05 | 82.98 | 87.30 | 0.88 | ||
| 测试场景3 | 85.70 | 95.22 | 96.74 | 91.78 | 90.38 | 0.95 | ||
| 测试场景4 | 90.04 | 96.49 | 84.56 | 91.15 | 88.61 | 0.92 | ||
注:为阴影的生产者精度;为非阴影的生产者精度;为阴影的用户精度;为非阴影的用户精度。 |
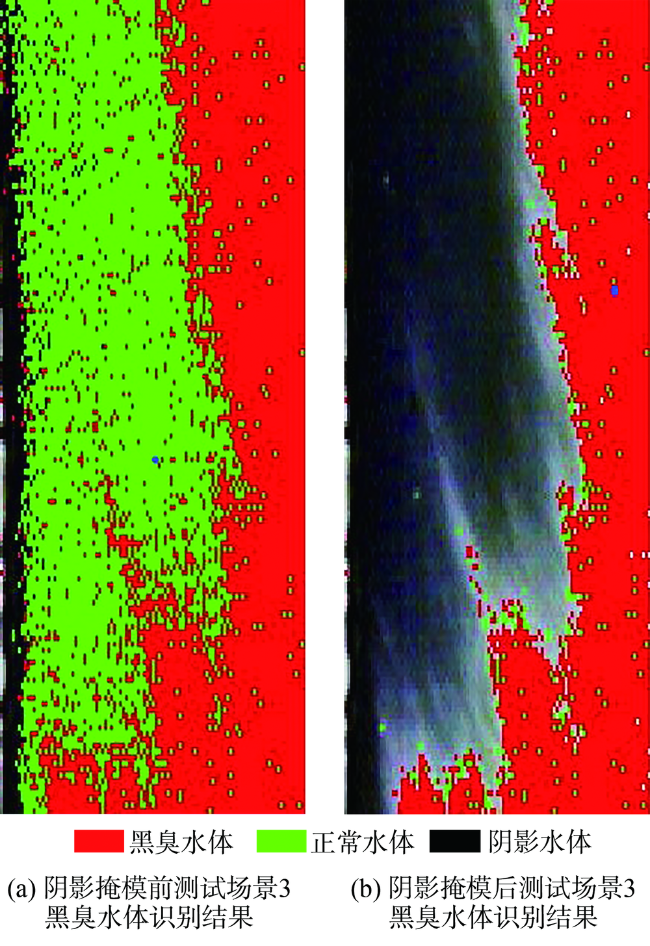
表3 阴影提取前后识别的黑臭水体像元占比Tab. 3 The pixel proportion of black and odor water identified before and after shadow extraction |
| 测试场景 | 阴影提取前 | 阴影提取后 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 黑臭水体 像元数/个 | 正常水体 像元数/个 | 黑臭像元 占比/% | 正常水体 像元占比/% | 黑臭水体 像元数/个 | 正常水体 像元数/个 | 黑臭像元 占比/% | 正常水体 像元占比/% | ||
| 测试场景1 | 16 859 | 5622 | 74.99 | 25.01 | 7235 | 140 | 98.10 | 1.90 | |
| 测试场景2 | 27 202 | 7450 | 78.50 | 21.50 | 13 040 | 112 | 99.15 | 0.85 | |
| 测试场景3 | 13 612 | 12 885 | 51.37 | 48.63 | 10 445 | 533 | 95.14 | 4.86 | |
| 测试场景4 | 17 827 | 6106 | 74.49 | 25.51 | 12 130 | 928 | 92.89 | 7.11 | |
| [1] |
国务院. 水污染防治计划[EB/OL]. http://www.gov. cn/zhengce/content/2015-04/16/content_9613.htm, 2015.
[ The State Council. Water pollution control project. http://www.gov. cn/zhengce/content/2015-04/16/content_9613.htm, 2015.]
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
段光耀, 宫辉力, 李小娟, 等. 结合特征分量构建和面向对象方法提取高分辨率卫星影像阴影[J]. 遥感学报, 2014,18(4):760-770.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
住房城乡建设部, 环境保护部. 城市黑臭水体整治工作指南[EB/OL]. http://www.mohurd.gov.cn/wjfb/201509/t20150911_224828.html, 2015.
[ Ministry of housing and urban-rural development, ministryc of environmental protection. Urban black and smelly water treatment work guide. http://www.mohurd.gov.cn/wjfb/201509/t20150911_224828.html, 2015.]
|
| [14] |
于丰华. 基于无人机高光谱遥感的东北粳稻生长信息反演建模研究[D]. 沈阳:沈阳农业大学, 2017.
[
|
| [15] |
|
| [16] |
罗华, 雷斌, 胡玉新. 一种机载InSAR水体阴影的提取和识别方法[J]. 遥感技术与应用, 2014,29(2):258-263.
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
ArévaloV, GonzálezJ,
|
| [23] |
|
| [24] |
蒲智, 杨辽, 白洁, 等. 基于面向对象技术的高分辨率遥感影像的阴影检测与去除[J]. 遥感技术与应用, 2008,23(6):735-738.
[
|
| [25] |
王旭, 王永刚, 孙长虹, 等. 城市黑臭水体形成机理与评价方法研究进展[J]. 应用生态学报, 2016,27(4):1331-1340.
[
|
| [26] |
丁潇蕾, 李云梅, 吕恒, 等. 城市黑臭水体的吸收特性分析[J]. 环境科学, 2018,39(10):129-139.
[
|
| [27] |
温爽, 王桥, 李云梅, 等. 基于高分影像的城市黑臭水体遥感识别:以南京为例[J]. 环境科学, 2018,39(1):57-67.
[
|
/
| 〈 |
|
〉 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}