
“四同”条件下周口城区高分一号遥感影像分类对比研究
|
叶杰(1979— ),男,河南驻马店人,高级工程师,主要从事遥感技术研究与应用。E-mail:21807621@qq.com |
收稿日期: 2019-09-02
要求修回日期: 2019-10-28
网络出版日期: 2020-12-25
基金资助
全国矿山环境恢复治理状况遥感地质调查与监测(DD20190705)
河南省航空物探遥感中心自主科研项目(2018-05)
2018年度省财政厅地质科研项目(豫国土资发[2018]98号)
版权
A Comparative Study on the Classification of GF-1 Remote Sensing Images for Zhoukou Urban under the Four Identical Condition
Received date: 2019-09-02
Request revised date: 2019-10-28
Online published: 2020-12-25
Supported by
National Remote Sensing Geological Survey and Monitoring for Mine Environmental Restoration and Control in China(DD20190705)
Independent Scientific Research Project of Henan Aero Geophysical Survey and Remote Sensing Center Research on Multi-Element Remote Sensing Information Extraction Technology of Urban Geological Environment in 2018(2018-05)
Henan Provincial Department of Finance Geological Research Project in 2018(豫国土资发[2018]98号)
Copyright
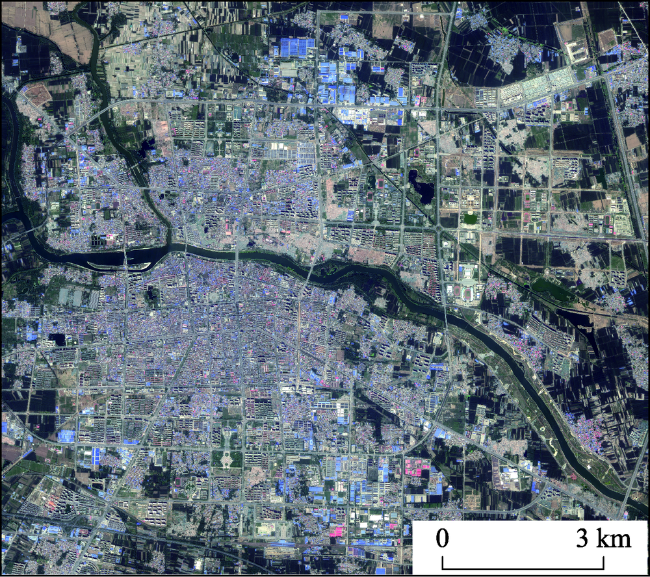
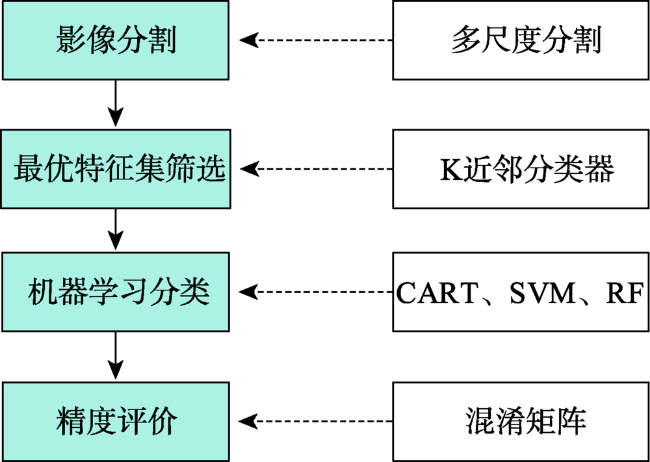
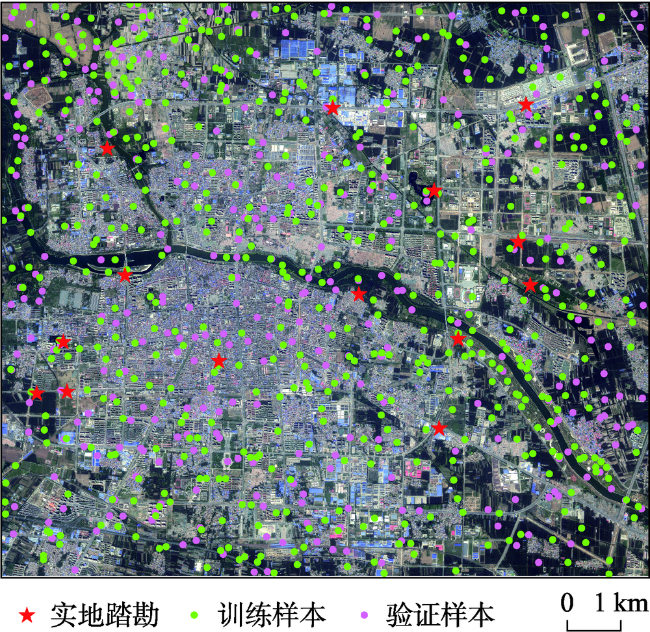
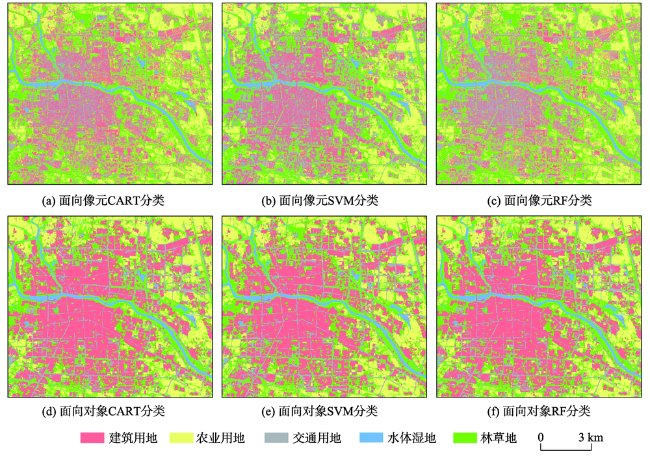
目前大多数面向像元、面向对象遥感影像分类对比研究算法、软件、样本均不同,引入多方面系统误差导致结果一定程度上不严谨。为更准确比较2种分类方法,本文采用面向像元、面向对象2种分类方式,在同软件平台、同分类器、同训练样本、同验证样本,即“四同”条件下对2018年4月17日高分一号周口城区融合影像进行分类对比研究,并完成主、客观评价精度评价。结果表明:① “四同”条件下2种分类方式、CART(Classification and Regression Tree)、SVM(Support Vector Machine)、RF(Random Forests)3种机器学习算法均能识别周口城区主要地物类型,而面向对象的分类效果明显优于面向像元分类,与前人研究结论一致。其中面向像元分类效果最好的是RF算法,总体分类精度为78.02%,Kappa系数为0.72;面向对象分类效果最好的是RF算法,总体分类精度为93.40%,Kappa系数为0.92;② 尽管由于光谱特征相似、分布交叉,单类别建筑用地、交通用地用户精度与生产者精度较低,但面向对象分类较面向像元分类效果明显提升,以RF分类为例,建筑用地生产者精度由56.18%提高至92.13%,用户精度由69.44%提高至87.23%;交通用地生产者精度由72.15%提高至89.87%,用户精度由72.15%提高至92.20%;③ 与前人研究成果比较,本文在“四同”条件下实现了更科学、更严谨的面向像元、面向对象遥感分类方法对比,对后续高分辨率遥感影像分类具有一定参考意义。

叶杰 , 孟凡晓 , 白潍铭 , 张斌 , 郑金明 . “四同”条件下周口城区高分一号遥感影像分类对比研究[J]. 地球信息科学学报, 2020 , 22(10) : 2088 -2097 . DOI: 10.12082/dqxxkx.2020.190483
At present, due to different classification methods, softwares, and samples used for classification which could introduce various systematic errors, the majority of studies for comparing the advantages and disadvantages of pixel-based and object-based classification are unprecise to a certain degree. To make a better comparison between the pixel-based and object-based approaches, pixel-based and object-based classification methods were adopted to classify the fused image of panchromatic and multispectral images provided by GF-1 satellite in the main urban district of Zhoukou on April 17, 2018, using the same hardware and software environments, classifier, training samples, and verification samples, namely four identical conditions. Subjective and objective evaluations of the pixel-based and object-based classification methods were made. For comparison, three machine learning algorithms including Classification and Regression Tree (CART), Support Vector Machine (SVM), and Random Forest (RF) were used as the classifiers in the pixel-based and object-based classification procedure. Results show that (1) both pixel-based and object-based approaches could recognize the main urban targets, which was consistent with previous research results. However, the object-based method had a better overall accuracy than the pixel-based method on average. For pixel-based image classification, RF produced the highest overall accuracy (78.02%) and the Kappa coefficient (0.72); for object-based image classification, RF also achieved the highest overall accuracy (93.40%) and the Kappa coefficient (0.92), which demonstrated that RF was the best machine learning algorithm for classifying Zhoukou urban targets; (2) due to similar spectral signature and cross-distribution, the Producer's Accuracy (PA) and User's Accuracy (UA) of building land, and traffic land were lower. However, the object-based classification produced much higher PA and UA than pixel-based classification in classifying building land and transportation land. Taking RF as example, the PA of building land increased from 56.18% to 92.13%, with the UA increasing from 69.44% to 87.23%, and the PA of traffic land increased from 72.15% to 89.87%, with the UA increasing from 72.15% to 92.20%; (3) compared with previous related researches, this paper conducts a more scientific and rigorous evaluation for pixel-based and object-based classification methods under the four identical conditions, which provides valuable references to classify urban targets using high resolution satellite remote sensing images in the future.
表1 高分一号卫星遥感数据参数Tab. 1 The parameters of GF-1 satellite image |
| 参数 | 2 m分辨率全色/8 m分辨率多光谱 | 16 m分辨率多光谱 | |
|---|---|---|---|
| 光谱范围/μm | 全色 | 0.45~0.90 | - |
| 多光谱 | 0.45~0.52 | 0.45~0.52 | |
| 0.52~0.59 | 0.52~0.59 | ||
| 0.63~0.69 | 0.63~0.69 | ||
| 0.77~0.89 | 0.77~0.89 | ||
| 空间分辨率/m | 全色 | 2 | 16 |
| 多光谱 | 8 | ||
| 幅宽/km | 60(2台相机) | 800(4台相机) | |
表2 面向对象分类最优特征集Tab. 2 Optimal feature set for object-based classifications |
| 特征类型 | 特征名称 | 物理意义 |
|---|---|---|
| 光谱特征 | Mean R | R波段均值 |
| Ratio R | R波段比率 | |
| quantile[50] (R) | R波段分位数 | |
| Max.diff. | 最大差值 | |
| Standard deviation NIR | NIR波段标准偏差 | |
| HIS Transformation Saturation | HIS空间饱和度 | |
| 形状特征 | Area Shape index Density Elliptic Fit Compactness(polygon) | 面积 |
| 形状指数 | ||
| 密度 | ||
| 椭圆拟合率 | ||
| 紧致度 | ||
| 纹理特征 | GLCM Entropy(all.dir.) GLCM Homogeneity(all.dir.) | 灰度共生矩阵熵 |
| 灰度共生矩阵均质性 | ||
| 自定义特征 | NDWI NDVI | 归一化水体指数 |
| 归一化植被指数 |
表3 基于GF-1号卫星影像周口城区面向像元、面向对象下的3种分类器(CART、SVM、RF)分类精度评价Tab. 3 Confusion matrices and associated classifier accuracies based on pixel-based and object-based classifications under three machine learning classifiers including CART, SVM and RF using GF-1 remote sensing image for classing the main district of Zhoukou urban |
| 面向像元CART分类混淆矩阵 | 面向对象CART分类混淆矩阵 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 64 | 6 | 0 | 9 | 4 | 83 | 77.10 | 农业用地 | 71 | 3 | 0 | 0 | 1 | 75 | 94.67 |
| 林草地 | 4 | 59 | 0 | 5 | 3 | 71 | 83.10 | 林草地 | 2 | 61 | 0 | 1 | 0 | 64 | 95.31 |
| 水体湿地 | 0 | 0 | 47 | 8 | 0 | 55 | 85.45 | 水体湿地 | 1 | 0 | 50 | 0 | 0 | 51 | 98.04 |
| 建筑用地 | 12 | 0 | 4 | 51 | 33 | 100 | 51.00 | 建筑用地 | 2 | 1 | 1 | 80 | 10 | 94 | 85.10 |
| 交通用地 | 0 | 0 | 0 | 16 | 39 | 55 | 70.90 | 交通用地 | 4 | 0 | 0 | 8 | 68 | 80 | 85.00 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 80.00 | 90.77 | 92.16 | 57.30 | 49.37 | PA/% | 88.75 | 93.85 | 98.04 | 89.89 | 86.08 | ||||
| OA=71.43% Kappa=0.64 | OA=90.66% Kappa=0.88 | ||||||||||||||
| 面向像元SVM分类混淆矩阵 | 面向对象SVM分类混淆矩阵 | ||||||||||||||
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 71 | 2 | 0 | 4 | 3 | 80 | 88.75 | 农业用地 | 72 | 1 | 0 | 1 | 3 | 77 | 93.50 |
| 林草地 | 3 | 63 | 0 | 3 | 0 | 69 | 91.30 | 林草地 | 1 | 64 | 0 | 3 | 1 | 69 | 92.75 |
| 水体湿地 | 0 | 0 | 48 | 0 | 0 | 48 | 100.00 | 水体湿地 | 0 | 0 | 51 | 1 | 0 | 52 | 98.08 |
| 建筑用地 | 5 | 0 | 3 | 60 | 35 | 103 | 58.25 | 建筑用地 | 5 | 0 | 0 | 79 | 4 | 88 | 89.77 |
| 交通用地 | 1 | 0 | 0 | 22 | 41 | 64 | 64.06 | 交通用地 | 2 | 0 | 0 | 5 | 71 | 78 | 91.03 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 88.75 | 96.92 | 94.11 | 67.42 | 51.90 | PA/% | 90.00 | 98.46 | 100.00 | 88.76 | 89.87 | ||||
| OA=77.75% Kappa=0.71 | OA=92.58% Kappa=0.91 | ||||||||||||||
| 面向像元RF分类混淆矩阵 | 面向对象RF分类混淆矩阵 | ||||||||||||||
| 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | 农业用地 | 林草地 | 水体湿地 | 建筑用地 | 交通用地 | 总计 | UA/% | ||
| 农业用地 | 66 | 3 | 0 | 9 | 5 | 83 | 79.52 | 农业用地 | 72 | 1 | 0 | 0 | 1 | 74 | 97.30 |
| 林草地 | 7 | 62 | 0 | 6 | 3 | 78 | 79.49 | 林草地 | 1 | 64 | 0 | 3 | 0 | 68 | 94.12 |
| 水体湿地 | 0 | 0 | 49 | 3 | 0 | 52 | 94.23 | 水体湿地 | 0 | 0 | 51 | 0 | 0 | 51 | 100.00 |
| 建筑用地 | 6 | 0 | 2 | 50 | 14 | 72 | 69.44 | 建筑用地 | 5 | 0 | 0 | 82 | 7 | 94 | 87.23 |
| 交通用地 | 1 | 0 | 0 | 21 | 57 | 79 | 72.15 | 交通用地 | 2 | 0 | 0 | 4 | 71 | 77 | 92.20 |
| 总计 | 80 | 65 | 51 | 89 | 79 | 总计 | 80 | 65 | 51 | 89 | 79 | ||||
| PA/% | 82.50 | 95.38 | 96.08 | 56.18 | 72.15 | PA/% | 90.00 | 98.46 | 100.00 | 92.13 | 89.87 | ||||
| OA=78.02% Kappa=0.72 | OA=93.40% Kappa=0.92 | ||||||||||||||
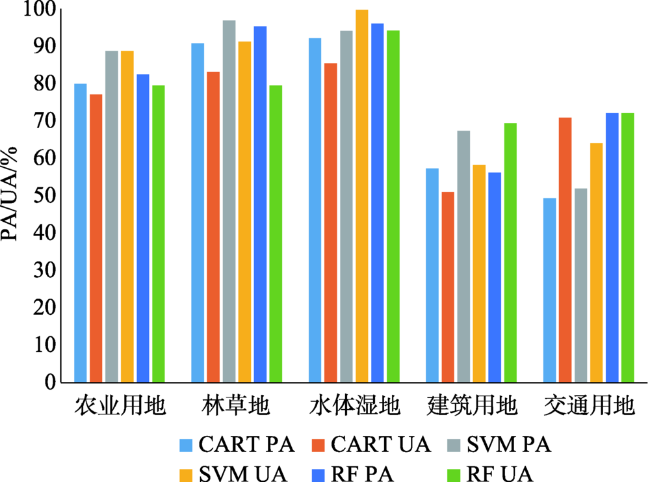
图5 周口城区面向像元分类下3种分类器(CART、SVM、RF)单类别PA、UA比较Fig. 5 Comparison of producer's accuracy and user's accuracy of pixel-based classification(under three machine learning classifiers including CART, SVM and RF) for Zhoukou urban at class level |
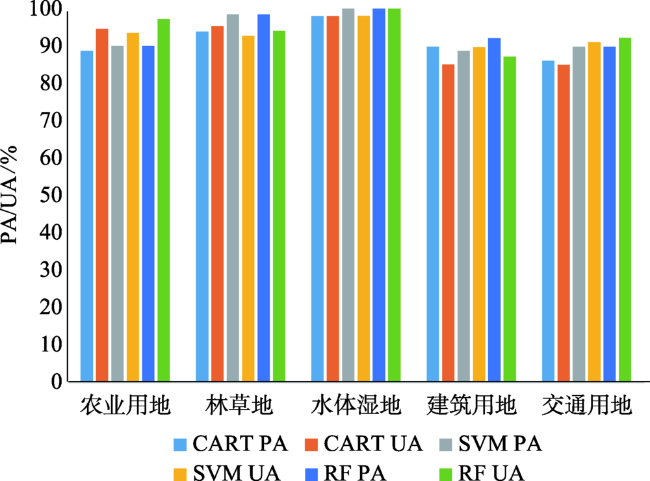
图6 周口城区面向对象分类下3种分类器(CART、SVM、RF)单类别PA、UA比较Fig. 6 Comparison of producer's accuracy and user's accuracy of object-based classification(under three machine learning classifiers including CART, SVM and RF) for Zhoukou urban at class level |
| [1] |
陈平生. K-means和ISODATA聚类算法的比较研究[J]. 江西理工大学学报, 2012,33(1):78-80.
[
|
| [2] |
彭光雄, 宫阿都, 崔伟宏, 等. 多时相影像的典型区农作物识别分类方法对比研究[J]. 地球信息科学学报, 2009,11(2):225-230.
[
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
耿仁方, 付波霖, 蔡江涛, 等. 基于无人机影像和面向对象随机森林算法的岩溶湿地植被识别方法研究[J]. 地球信息科学学报, 2019,21(8):1295-1306.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
梁艳. 面向对象与基于像素的高分辨率遥感影像分类在土地利用分类中的应用比较[D]. 太原:太原理工大学, 2012.
[
|
| [15] |
刘纪远, 张增祥, 庄大方, 等. 中国土地利用变化的遥感时空信息研究[M]. 北京: 科学出版社, 2005.
[
|
| [16] |
|
| [17] |
袁泽. 基于GF-2遥感影像的城镇地物信息提取分割尺度研究[D]. 乌鲁木齐:新疆大学, 2016.
[
|
| [18] |
杜斌. 基于面向对象的高分辨率遥感影像水体信息提取优势研究[D]. 昆明:云南师范大学, 2014.
[
|
| [19] |
|
| [20] |
杨宁. 高分辨率影像面向对象分类特征选择方法研究[D]. 西安:西安科技大学, 2012.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}