
基于粒子滤波的行车轨迹路网匹配方法
|
郑诗晨(1990— ),女,安徽萧县人,硕士,主要研究方向为粒子滤波与GIS时空过程模拟。E-mail: shichen_zheng@163.com |
收稿日期: 2019-11-27
要求修回日期: 2020-02-13
网络出版日期: 2021-01-25
基金资助
国家自然科学基金重点项目(41631175)
版权
Vehicle Trajectory-map Matching based on Particle Filter
Received date: 2019-11-27
Request revised date: 2020-02-13
Online published: 2021-01-25
Supported by
National Natural Science Foundation of China(41631175)
Copyright
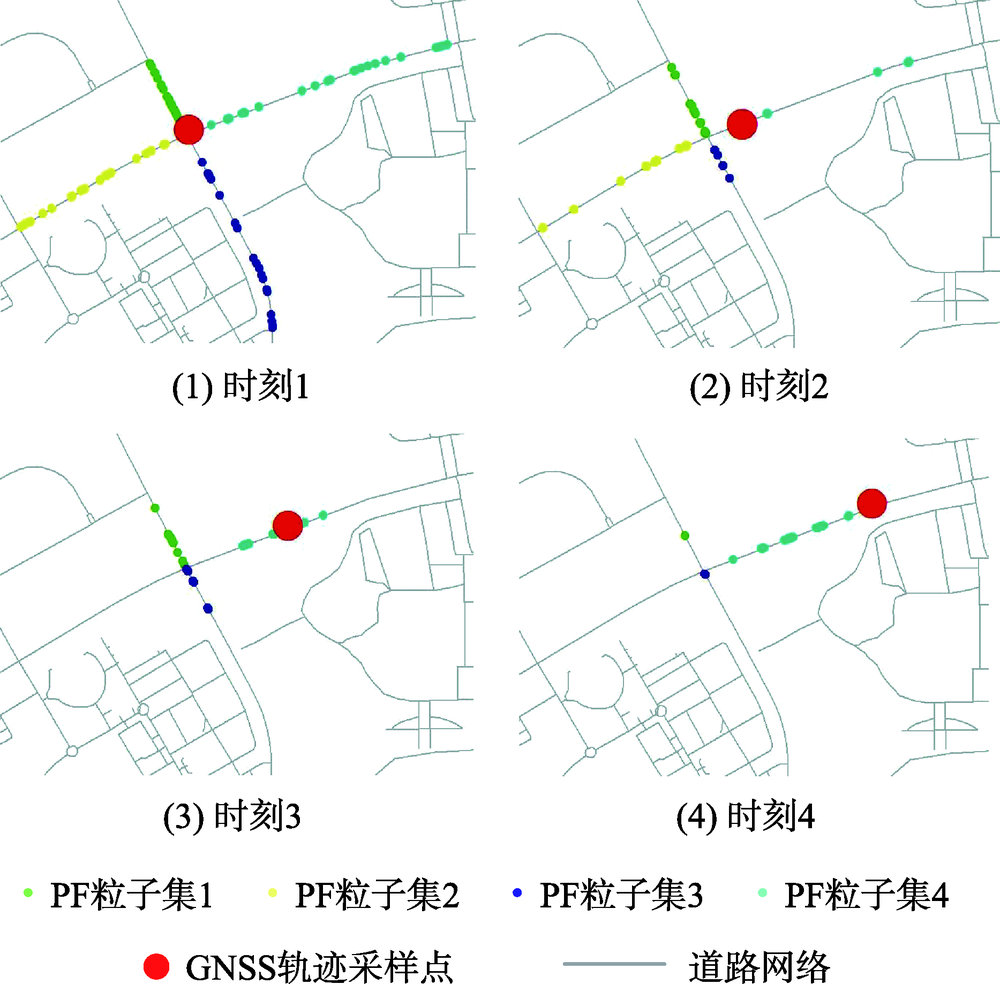
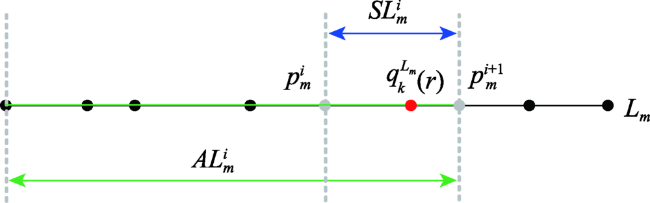
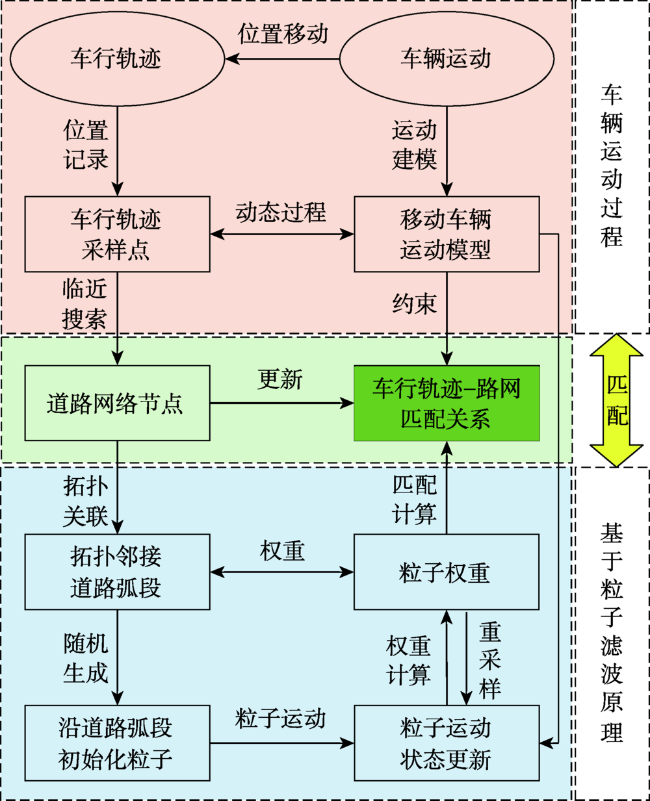
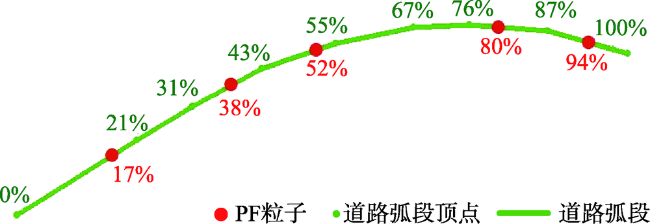
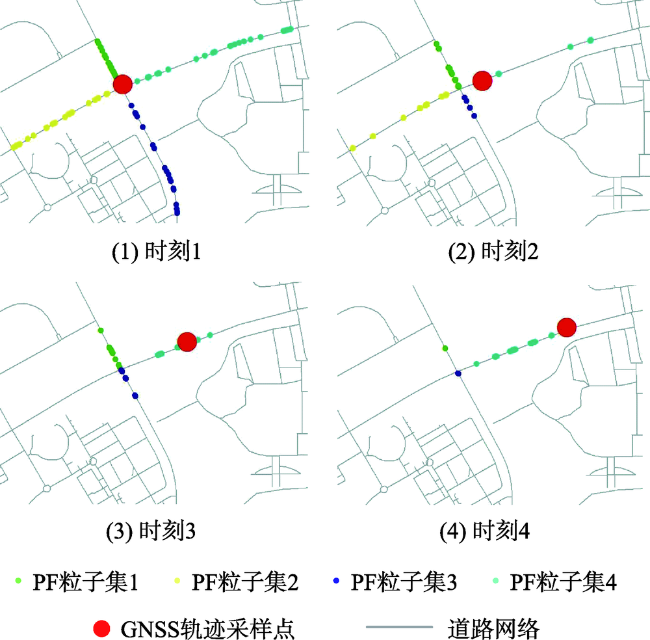
行车轨迹是一种时间序列的地理空间位置采样数据,而传统的轨迹—路网匹配方法主要以全局或局部寻优的方式建立轨迹—路网匹配关系,影响了时空场景中数据的匹配计算过程的相对独立性。针对这个问题,本文基于粒子滤波(Particle Filter,PF)原理建立行车轨迹与道路网络之间的匹配关系。首先,沿轨迹中车辆运动方向在道路网络中搜索邻近道路节点,在与道路节点拓扑邻接的道路弧段上初始化随机生成粒子,根据轨迹中车辆运动模型将粒子沿所在道路弧段移动;然后,基于PF原理计算各时刻粒子运动状态及与行车轨迹采样点之间的距离误差,根据高斯概率密度函数计算粒子权重并利用随机重采样方法进行粒子重采样,迭代更新粒子运动状态;最后,计算与搜索到的道路节点拓扑邻接的每条道路弧段中累计粒子权重,通过各道路弧段累计权重计算轨迹—路网匹配关系。以行车轨迹进行实验表明,利用本文方法可以通过粒子时空变化反映采样点的移动,行车轨迹—路网匹配结果的正确率大于85%,能够实现行车轨迹和路网的准确匹配。
郑诗晨 , 盛业华 , 吕海洋 . 基于粒子滤波的行车轨迹路网匹配方法[J]. 地球信息科学学报, 2020 , 22(11) : 2109 -2117 . DOI: 10.12082/dqxxkx.2020.190738
Vehicle trajectory is a time series geospatial location sampling data. The traditional vehicle trajectory-map matching methods are mainly computed by ways of global or local incremental optimization, which limited the relative independence in matching process of the trajectory data in spatial temporal situation. To address this problem, this paper proposes the method of computing matching relationships between vehicle trajectory and road map based on the Particle Filter (PF) method. First, construct the road network from the road dataset, and search the neighboring nodes from the road network based on the vehicle sampling locations along the moving direction that are detected from the vehicle trajectory. Then, construct the motion model based on the vehicle trajectories, randomly generate particles on the road arcs that are related to the searched nodes, and move the particles along the sampled road segments according to the trajectory motion model. Second, compute the motion states of the particles according to the motion model in each time state, get the distance errors between the particles and the vehicle position sampling locations, obtain the particle weights based on the Gaussian probability density function, resample particles based on the random resampling method, and then update the motion states of particles iteratively. Finally, compute the accumulated weights of the particles in each of the topologically related road arcs, which are searched by the neighboring nodes, and calculate the matching relations between the vehicle trajectories and the map based on the accumulated weights of the particles. With this method, the experiments were conducted based on the vehicles' trajectories, which were two long sequenced trajectories with the total length > 102 km. The results showed that 85.51% and 93.01% correctness rates of vehicle trajectory-map matching experiments had been achieved for each of the vehicle trajectories. Besides, the motion of the vehicle sampling locations could be reflected by the spatial-temporal movements of the particles, where particles started to follow the motion of the vehicle sampling locations after a few time states. The results showed that it could achieve the accurate matching relations between the vehicle trajectories and the road map.
表1 车行轨迹采样信息Tab. 1 The sampling information of vehicle trajectory datasets |
| 轨迹 | 采样点数 | 总长度/m | 采样时长/s |
|---|---|---|---|
| 车行轨迹1 | 1251 | 77 090 | 12 500 |
| 车行轨迹2 | 587 | 25 397 | 5860 |
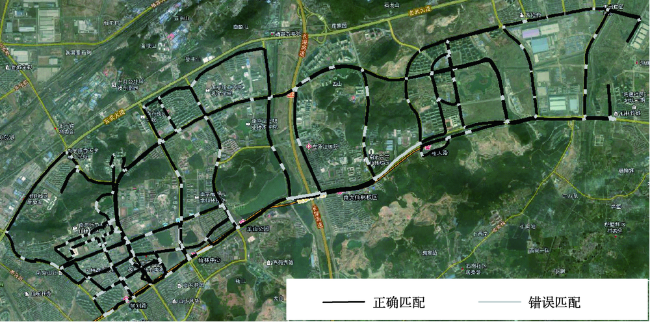
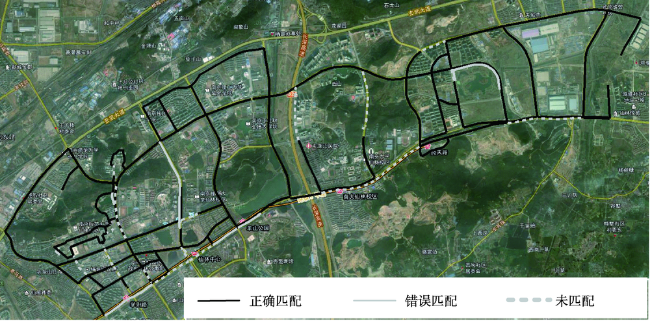
表2 车行轨迹-路网匹配结果统计Tab. 2 The statistics of the vehicle trajectory-map matching results (m) |
| 实验方法 | 轨迹 | 匹配长度 | 正确匹配 | 错误匹配 | 未匹配 |
|---|---|---|---|---|---|
| 距离判别法 | 车行轨迹1 | 77 746 | 64 994 | 12 752 | 0 |
| 车行轨迹2 | 26 424 | 21 252 | 5172 | 0 | |
| 本文方法 | 车行轨迹1 | 71 220 | 65 921 | 5299 | 8882 |
| 车行轨迹2 | 25 057 | 23 621 | 1436 | 2578 |
| [1] |
吴华意, 黄蕊, 游兰, 等. 出租车轨迹数据挖掘进展[J]. 测绘学报, 2019,48(11):1341-1356.
[
|
| [2] |
高文超, 李国良, 塔娜. 路网匹配算法综述[J]. 软件学报, 2018,29(2):225-250.
[
|
| [3] |
|
| [4] |
|
| [5] |
高强, 张凤荔, 王瑞锦, 等. 轨迹大数据:数据处理关键技术研究综述[J]. 软件学报, 2017,28(4):959-992.
[
|
| [6] |
张健钦, 李明轩, 段颖超, 等. 一种改进的快速浮动车地图匹配方法[J].测绘通报,2017(1):87-92.
[
|
| [7] |
刘张, 王心迪, 闫小勇. 面向复杂城市道路网络的GPS轨迹匹配算法[J]. 电子科技大学学报, 2016,45(6):1008-1013.
[
|
| [8] |
吴涛, 向隆刚, 龚健雅. 路网更新的轨迹—地图匹配方法[J]. 测绘学报, 2017,46(4):507-515.
[
|
| [9] |
|
| [10] |
|
| [11] |
高需, 武延军, 郭黎敏, 等. 基于偏好的个性化路网匹配算法[J]. 软件学报, 2018,29(11):3500-3516.
[
|
| [12] |
|
| [13] |
|
| [14] |
李清泉, 胡波, 乐阳. 一种基于约束的最短路径低频浮动车数据地图匹配算法[J]. 武汉大学学报·信息科学版, 2013,38(7):805-808, 885.
[
|
| [15] |
朱递, 刘瑜. 一种路网拓扑约束下的增量型地图匹配算法[J]. 武汉大学学报·信息科学版, 2017,42(1):77-83.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
黄小平, 王岩, 廖鹏程. 粒子滤波原理及应用——MATLAB仿真[M]. 北京: 电子工业出版社, 2017: 1-7.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}