
一种由粗到精的光学与SAR遥感图像配准算法
|
张明祥(1995— ),男,甘肃陇南人,硕士生,主要从事地理信息系统及其应用研究。E-mail: mx- zhang@qq.com |
收稿日期: 2019-12-02
要求修回日期: 2020-01-24
网络出版日期: 2021-01-25
基金资助
国家自然科学基金项目(41701428)
版权
A Coarse-to-Fine Optical and SAR Remote Sensing Image Registration Algorithm
Received date: 2019-12-02
Request revised date: 2020-01-24
Online published: 2021-01-25
Supported by
National Natural Science Foundation of China(41701428)
Copyright
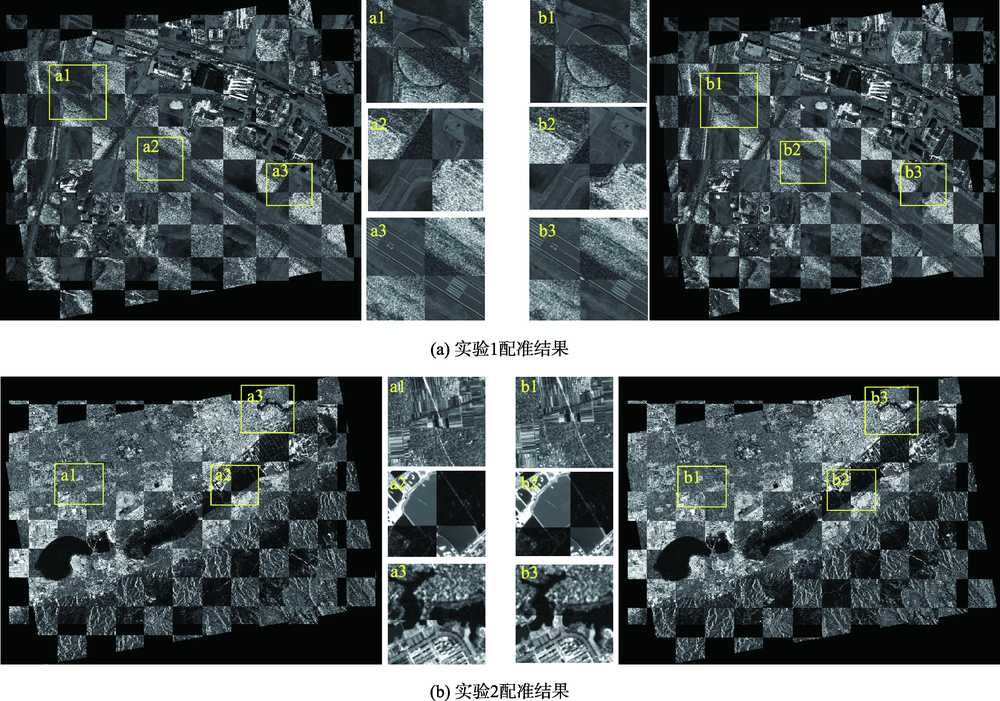
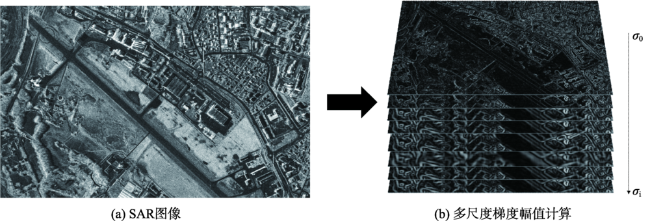
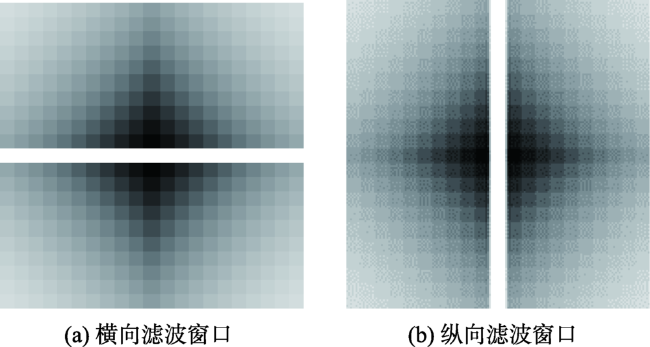
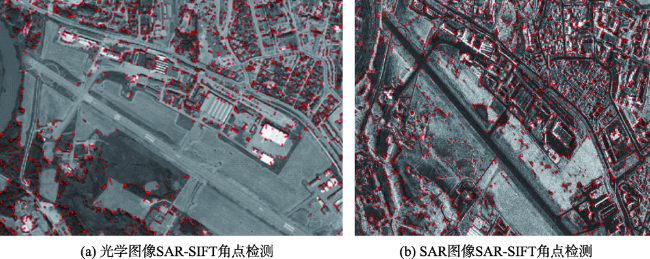
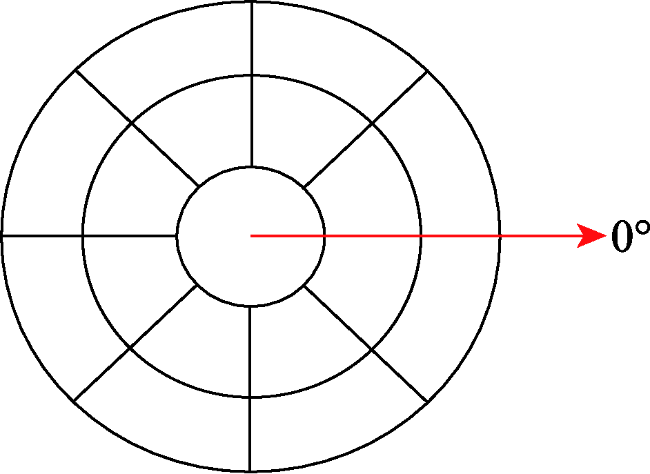
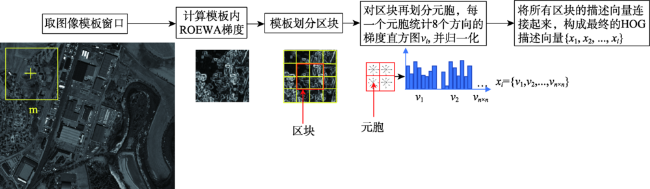
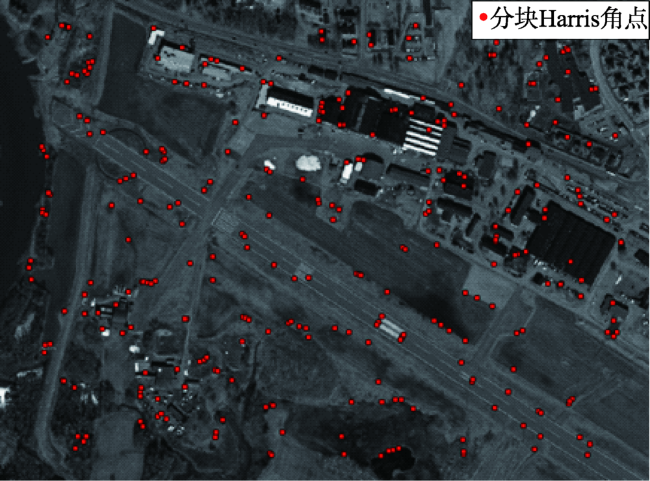
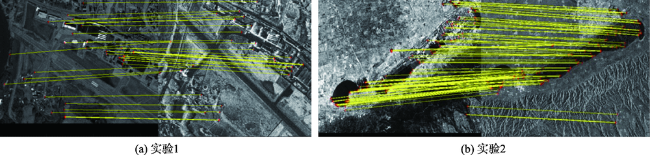
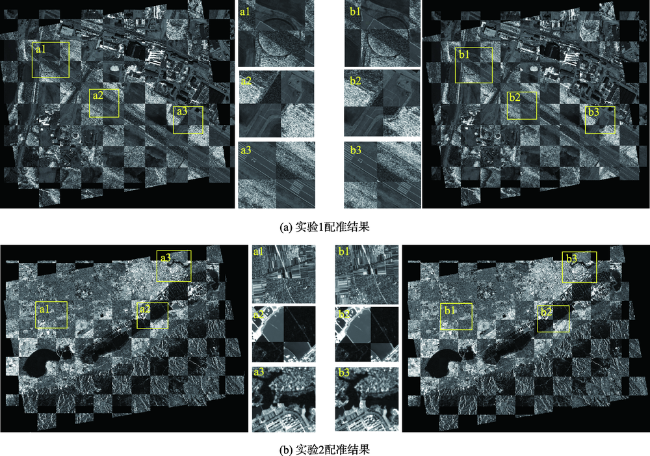
由于光学遥感图像和SAR图像具有明显的非线性强度差异,且SAR图像存在斑点噪声,使得其配准存在较大难度。为此,本文结合基于特征和基于区域图像配准方法的优点,并组合为混合模型,提出一种由粗到精的自动配准算法。以光学遥感图像和SAR图像分别为参考图像和待配准图像,先以基于特征点的SAR-SIFT完成粗配准,再以基于区域的ROEWA-HOG完成精配准。① 采用SAR-SIFT算法进行特征点检测和特征匹配来计算图像的仿射变换模型,以消除参考图像和待配准图像之间明显的旋转、尺度和平移差异,至此完成图像粗配准;② 在此基础上利用分块Harris角点检测在参考图像上获得特征点,并根据特征点确定待配准图像上的同名点搜索区域;③ 计算图像的ROEWA梯度,构造以特征点为中心的模板区域内的HOG特征向量,以SSD作为相似性测度搜索待配准图像上的同名点,完成高精度的图像配准;④ 进行图像配准实验,对配准结果进行目视检查和精度评估。经过多组光学与SAR图像配准实验,验证本文算法能够结合基于特征和基于区域的图像配准方法的优点,较好地抵抗光学与SAR图像之间的非线性强度、旋转、尺度、平移差异和SAR图像的噪声影响,并逐步提高配准精度,最终配准精度达到1个像素左右,实现了光学与SAR图像的高精度自动配准,能够满足光学与SAR图像后续综合应用。
张明祥 , 王泽根 , 白茹月 , 贾鸿顺 . 一种由粗到精的光学与SAR遥感图像配准算法[J]. 地球信息科学学报, 2020 , 22(11) : 2238 -2246 . DOI: 10.12082/dqxxkx.2020.190742
Due to the fact that optical remote sensing image and SAR image have obvious nonlinear intensity differences, and that SAR image has speckle noise, it is difficult to register them. Feature-based image registration and region-based image registration are the two most common methods of optical and SAR image registration. One advantage of feature-based image registration is that it can solve the problem of rotation, scale, and translation differences between images. Another advantage is the small amount of calculation. However, this method usually has the disadvantages of low registration accuracy and instability. Region-based image registration can achieve high-precision registration of heterogeneous images. However, it performs poorly for images with large rotations, scale differences, and it has heavy computation task. For these problem, this paper combines the advantages of feature-based and region-based image registration methods into a hybrid model and proposes an automatic registration algorithm for optical and SAR images. The optical remote sensing image is the reference image while the SAR image is the one to be registered. The SAR-SIFT based on the feature points is used to complete the coarse registration and then the ROEWA-HOG based on the region is used to complete the fine registration. Firstly, the SAR-SIFT algorithm, robust to nonlinear intensity differences and speckle noise, is used to perform feature point detection and feature matching to calculate the affine transformation model of the image to eliminate the obvious rotation, scale and translation difference between the optical image and the SAR image. This is the coarse image registration. Secondly, we use the block Harris corner detection method to obtain a certain number of evenly distributed feature points on the reference image. We determine the search area of the corresponding points on the image to be registered according to the feature points, calculate the ROEWA gradient of the image, and then use a fast calculation strategy to construct the HOG feature vector in the template area with the feature points as the center. Then, we use SSD as the similarity measure to search the corresponding points on the image to be registered. This is the high-precision image registration. Finally, we carry out the image registration and perform visual inspection and quantitative evaluation of the registration results. It is demonstrated that the algorithm in this paper can combine the advantages of feature-based and region-based image registration methods to better resist the noise effect of SAR images and the nonlinear intensity, rotation, scale, and translation differences between optic and SAR images. The final registration accuracy of our high-precision automatic registration method is 1 pixel. High-precision automatic registration for SAR images can meet subsequent comprehensive applications of optical and SAR images.
表1 光学与SAR图像数据信息Tab.1 Optical and SAR image data information |
| 实验编号 | 成像传感器 | 图像尺寸/像元 | 地面分辨率 | 成像模式 | 入射角/° | 极化方式 | 产品级别 | 成像日期 | 成像区域 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 实验1 | Googleearth | 1 m | - | - | - | - | 2012-05-07 | 挪威 | |||
| TerraSAR-X | 1 m | ST | HH | Level-1B | 2013-04-10 | 挪威 | |||||
| 实验2 | Sentinel-2A 第4波段 | 10 m | - | - | - | Level-1C | 2018-06-05 | 运城 | |||
| Sentinel-1A | 5×20 m | IW | VH | Level-1 | 2019-10-28 | 运城 | |||||
表2 光学与SAR图像配准结果评估和比较Tab.2 Evaluation and comparison of optical and SAR image registration results |
| 配准算法 | 实验编号 | 粗配准RMSE | 精配准RMSE | 精配准CMR/% | 粗配准运行时间/s | 精配准运行时间/s |
|---|---|---|---|---|---|---|
| 本文算法 | 实验1 | 5.35 | 1.21 | 81 | 39 | 109 |
| 实验2 | 3.83 | 0.91 | 93 | 53 | 147 | |
| SAR-SIFT+HOPC | 实验1 | 5.43 | 1.09 | 89 | 41 | 231 |
| 实验2 | 3.85 | 0.82 | 95 | 51 | 318 |
| [1] |
郭唯娜, 柯长青, 范宇宾. 基于SAR干涉数据的东帕米尔高原冰川变化[J]. 地球信息科学学报, 2019,21(11):1790-1801.
[
|
| [2] |
叶沅鑫, 郝思媛, 曹云刚. 基于几何结构属性的光学和SAR影像自动配准[J]. 红外与毫米波学报, 2017,36(6):720-726.
[
|
| [3] |
姜文聪, 张继贤, 程春泉, 等. SIFT与粗差剔除算法相结合的机载SAR影像匹配研究[J]. 地球信息科学学报, 2013,15(3):440-445.
[
|
| [4] |
杨勇, 胡思茹. 基于模板匹配约束下的光学与SAR图像配准[J]. 系统工程与电子技术, 2019,41(10):2235-2242.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}