
ESTARFM算法在长江中下游平原地区的适用性研究
|
管琪卉(1995— ),女,江西赣州人,硕士生,研究方向为土地利用/覆被变化研究。E-mail: guanqihui0825@163.com |
收稿日期: 2020-07-29
要求修回日期: 2020-12-27
网络出版日期: 2021-08-25
基金资助
国家自然科学基金项目(41761020)
国家自然科学基金项目(41961049)
版权
Analysis of Applicability about ESTARFM in the Middle-Lower Yangtze Plain
Received date: 2020-07-29
Request revised date: 2020-12-27
Online published: 2021-08-25
Supported by
National Natural Science Foundation of China(41761020)
National Natural Science Foundation of China(41961049)
Copyright
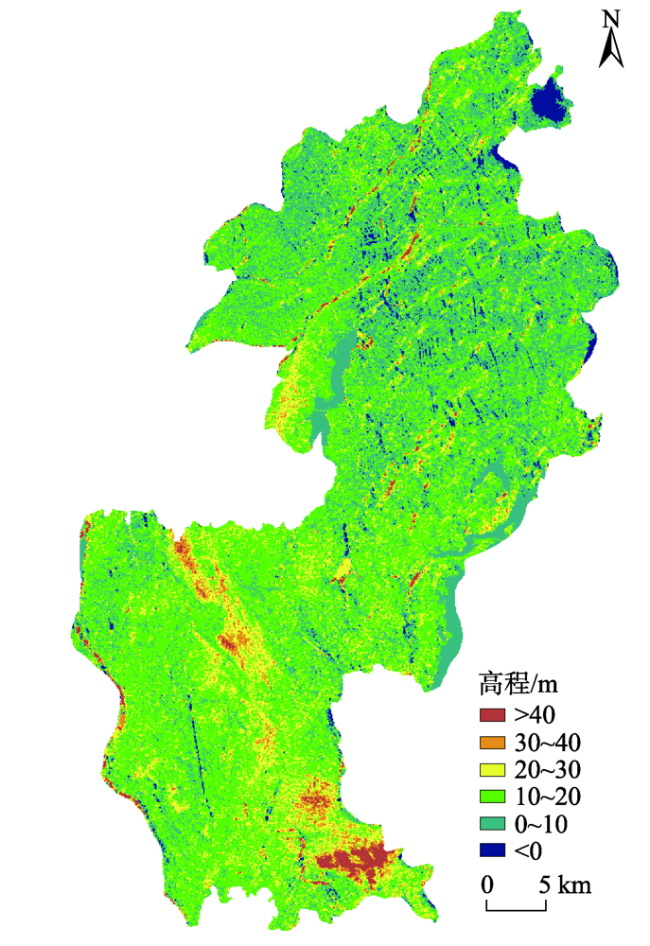
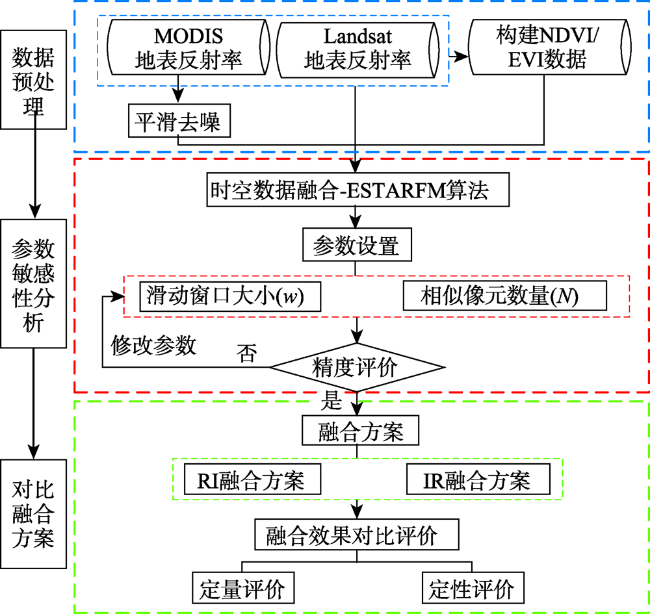
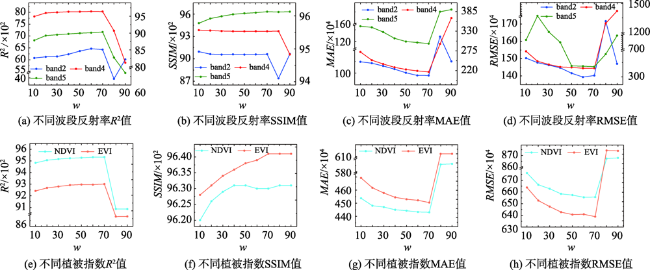
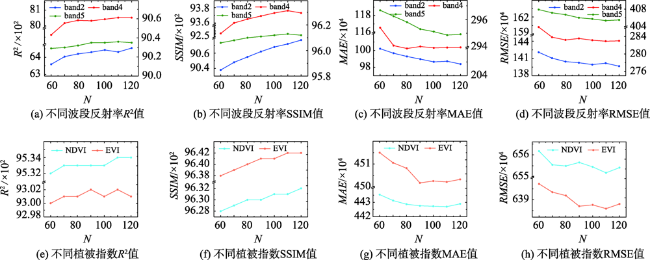
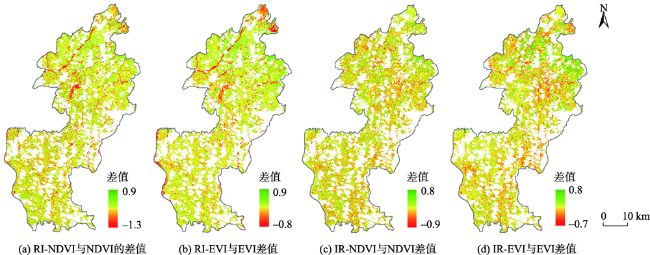
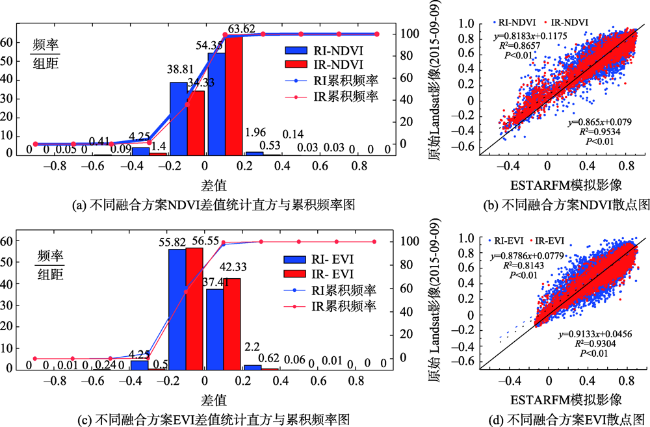
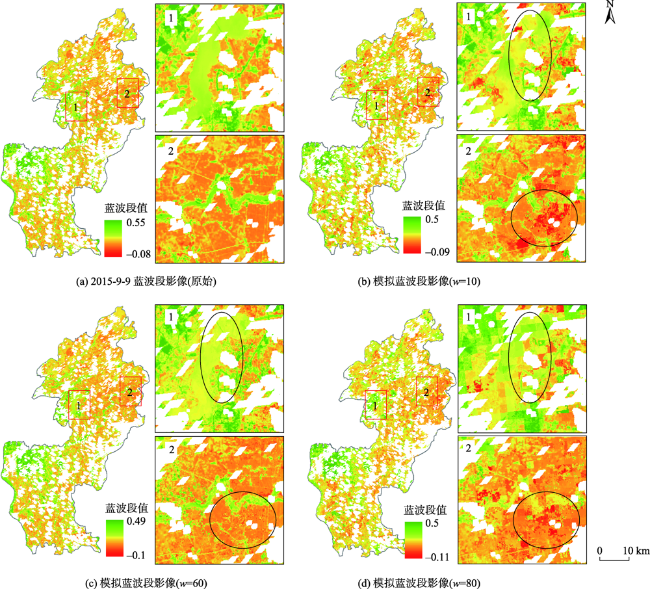
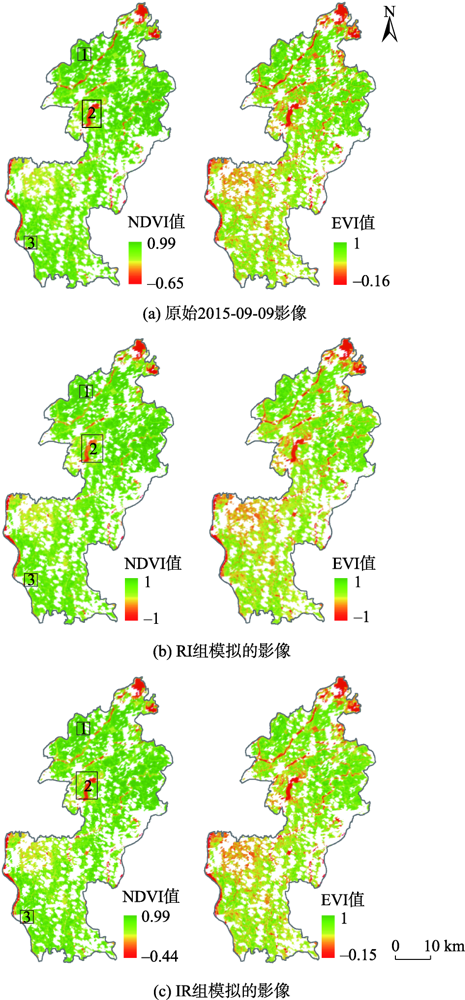
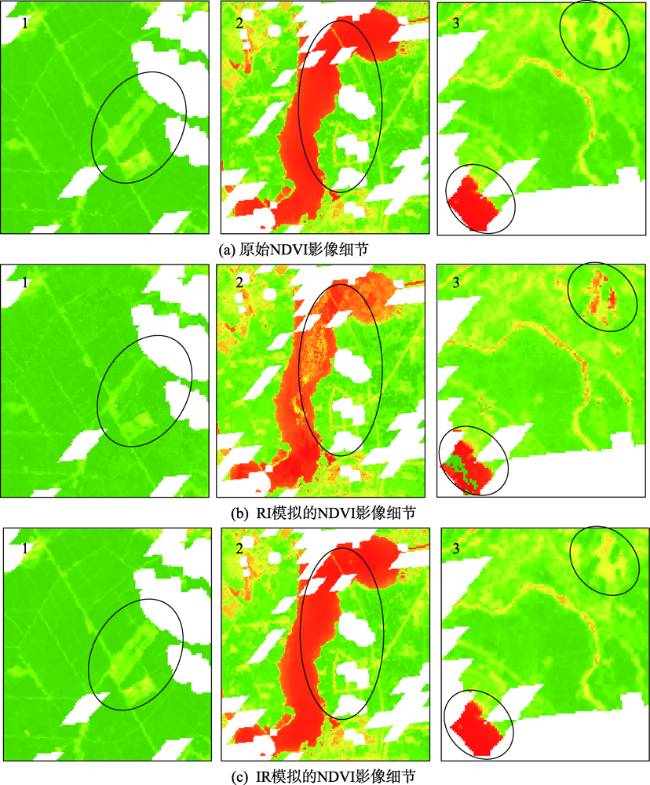
时空融合技术是目前解决单一遥感数据源难以同步获取高时空分辨率数据的有效途径。然而,如何设置参数使模型融合效果最佳,如何设置在植被监测中广泛应用的植被指数的融合步骤,进而获得最佳的植被指数时序数据,目前仍不明晰。本文以长江中下游平原地区的典型县域—南昌县为例,基于Landsat和MODIS多时相数据对当前主流时空融合模型—ESTARFM (Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)进行参数敏感性分析,并系统地对比分析了2组融合实验RI(先融合波段反射率后计算植被指数)和IR(先计算植被指数后直接融合)的融合效果。结果表明: ① ESTARFM算法中参数的敏感性在波段反射率、植被指数融合中表现出相似的特征,随着滑动窗口与相似像元数量的增大,融合误差整体呈现出先减小后趋于稳定或增大的趋势;在ESTARFM算法应用中,存在着最佳参数设置范围;② 相较于RI组,IR组模拟结果精度更高(R2RI-NDVI=0.866,R2IR-NDVI=0.953,R2RI-EVI =0.814,R2IR-EVI =0.930),且能够较好地削弱“斑块”现象,更好地表征出细小地物和纹理特征。研究结果为遥感数据时空融合模型在地块破碎、种植制度多变的复杂环境中的应用提供借鉴和参考。
管琪卉 , 丁明军 , 张华 , 王鹏 . ESTARFM算法在长江中下游平原地区的适用性研究[J]. 地球信息科学学报, 2021 , 23(6) : 1118 -1130 . DOI: 10.12082/dqxxkx.2021.200404
The spatial-temporal fusion technology is an effective tool to blend observations from sensors with different spatial and temporal characteristics. The ESTARFM algorithm has good applicability to areas with fragmented land, and is susceptible to meteorological conditions, and has important practical significance for resource and environmental monitoring in southern China. However, how to select the fusion scheme and set the parameters of the fusion model to achieve the best fused time series vegetation index data is still unclear. This paper takes Nanchang County, a typical county in the middle and lower reaches of the Yangtze River, as an example, to analyze the parameters sensitivity of the Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model (ESTARFM) for fusing multi-temporal Landsat and MODIS data. Based on Normalized Differential Vegetation Index (NDVI) and Enhanced Vegetation Index (EVI), we systematically compared the performance of vegetation index fusion using the RI scheme (band reflectance was fused firstly and then the vegetation index was calculated) and IR scheme (vegetation index was calculated firstly and then directly fused). The results show that: (1) The sensitivity of parameters (sliding window size and number of similar pixels) in ESTARFM displayed similar characteristics in both the fusion of band reflectance and vegetation index. With the increase of sliding window size and number of similar pixels, the R 2 and SSIM values of band reflectance and vegetation index increased firstly and then remained steady or decreased, while the overall fusion error (MAE and RMSE values) decreased firstly and then remained steady or increased. There was an optimal parameter setting range in the application of ESTARFM model. The parameter sensitivity analysis is required to determine the optimal parameter range when adopting ESTARFM algorithm in different regions; (2) Compared with the RI scheme, the IR scheme had a higher fusion accuracy (R2RI-NDVI=0.866, R2IR-NDVI=0.953, R2RI-EVI =0.814, R2IR-EVI =0.930). It produced less outliers and noise during the fusion process and can effectively weaken the "pattern spot" and preserve spatial details and texture features, resulting in a high similarity with the real image. In addition, based on Landsat and MODIS multi-temporal images, the ESTARFM algorithm can also be used to generate high-temporal-resolution images to approximately replace the cloud and cloud shadow areas in Landsat images, which can effectively overcome the "cloud pollution" phenomenon in cloudy and rainy areas and improve remote sensing data quality. Our results provide a reference for the application of spatial-temporal fusion model in the complex environment with fragmented land and changeable planting systems.
表1 Landsat 8OLI和MODIS影像波段范围Tab. 1 Band ranges of Landsat 8 OLI and MODIS images |
| 波段 | 传感器谱段/μm | 空间分辨率/m | ||||
|---|---|---|---|---|---|---|
| OLI波段 | MODIS波段 | OLI | MODIS | OLI | MODIS | |
| band2(蓝) | band3(蓝) | 0.45~0.51 | 0.459~0.479 | 30 | 500 | |
| band4(红) | bnad1(红) | 0.64~0.67 | 0.620~0.670 | 30 | 250 | |
| band5(近红外) | band2(近红外) | 0.85~0.88 | 0.841~0.876 | 30 | 250 | |
表2 Landsat 8OLI和MODIS影像获取时间、云量与用途Tab. 2 Acquisition time, cloud cover and use of Landsat 8 OLI and MODIS images |
| Landsat 8 OLI | MODIS | |||
|---|---|---|---|---|
| 影像时间 | 数据用途 | 云量/% | 影像时间 | 数据用途 |
| 2015-08-24 | 融合输入 | 17.27 | 2015-08-21 | 融合输入 |
| 2015-09-09 | 融合验证 | 1.45 | 2015-09-06 | 融合输入 |
| 2015-10-11 | 融合输入 | 0.62 | 2015-10-08 | 融合输入 |
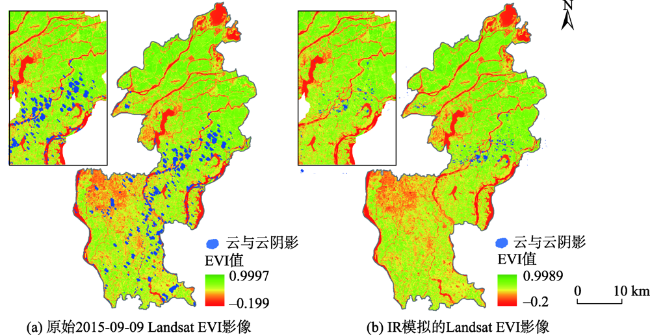
图10 原始 Landsat EVI影像(2015-09-09)与经模拟影像替换的EVI影像Fig. 10 Original Landsat EVI images on 2015-09-09 and EVI images replaced by fused images |
表3 RI和IR组模拟影像评价指标对比Tab. 3 The comparison of the evaluation indexes of the predicted images by RI/ IR groups |
| R2/×102 | SSIM/×102 | MAE/×104 | RMSE/×104 | time/h | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RI | IR | RI | IR | RI | IR | RI | IR | RI | IR | |||||
| NDVI | 86.57 | 95.34 | 99.89 | 99.9 | 709.9 | 442.8 | 1032.2 | 655.3 | 18 | 9 | ||||
| EVI | 81.43 | 93.04 | 99.72 | 99.96 | 778.7 | 449.8 | 1069.0 | 637.8 | 21 | 9 | ||||
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
谢登峰, 张锦水, 潘耀忠, 等. Landsat 8和MODIS融合构建高时空分辨率数据识别秋粮作物[J]. 遥感学报, 2015,19(5):791-805.
[
|
| [6] |
初庆伟, 张洪群, 吴业炜, 等. Landsat-8卫星数据应用探讨[J]. 遥感信息, 2013,28(4):110-114.
[
|
| [7] |
孙佩军, 张锦水, 潘耀忠, 等. 构建时空融合模型进行水稻遥感识别[J]. 遥感学报, 2016,20(2):328-343.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
柳文杰, 曾永年, 张猛. 融合时间序列环境卫星数据与物候特征的水稻种植区提取[J]. 遥感学报, 2018,22(3):381-391.
[
|
| [17] |
李盛阳, 张万峰, 杨松. 多源高分辨率遥感影像智能融合[J]. 遥感学报, 2017,21(3):415-424.
[
|
| [18] |
蒋敏, 李秀彬, 辛良杰, 等. 南方水稻复种指数变化对国家粮食产能的影响及其政策启示[J]. 地理学报, 2019,74(1):32-43.
[
|
| [19] |
|
| [20] |
闫慧敏, 黄河清, 肖向明, 等. 鄱阳湖农业区多熟种植时空格局特征遥感分析[J]. 生态学报, 2008,28(9):4517-4523.
[
|
| [21] |
|
| [22] |
|
| [23] |
李小文, 刘素红. 遥感原理与应用[M]. 北京: 科学出版社, 2008.
[
|
| [24] |
梅安新, 彭望琭, 秦其明, 等. 遥感导论[M]. 北京: 高等教育出版社, 2001.
[
|
| [25] |
|
| [26] |
董文全. 多源遥感数据时空融合及其在农田监测领域的应用研究[D]. 北京:中国科学院大学, 2017.
[
|
| [27] |
陈梦露, 李存军, 官云兰, 等. 基于ESTARFM模型的区域农田高时空分辨率影像产生与应用[J]. 作物学报, 2019,45(7):1099-1110.
[
|
| [28] |
袁明月, 魏悦, 孙伟, 等. 一种改进的遥感影像去噪综合模型[J]. 北京测绘, 2019,33(7):776-780.
[
|
| [29] |
黄微, 汪月云, 陈休. 基于透射率拉伸的光学遥感影像薄云去除[J]. 遥感信息, 2018,33(6):26-31.
[
|
| [30] |
陈阳, 范建容, 文学虎, 等. 基于时空数据融合模型的TM影像云去除方法研究[J]. 遥感技术与应用, 2015,30(2):312-320.
[
|
| [31] |
陈梦露, 李存军, 官云兰, 等. 基于Landsat 8影像的厚云及云影去除方法[J]. 北京测绘, 2019,33(4):382-386.
[
|
| [32] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}