
基于WiFi探针数据的城市出行轨迹提取
|
廖嘉欣(1997— ),男,江西定南人,硕士,主要从事无线传感器网络与GIS研究。E-mail: 1204163777@qq.com |
收稿日期: 2020-12-22
要求修回日期: 2021-02-18
网络出版日期: 2022-01-25
基金资助
国家自然科学基金项目(41561085)
国家自然科学基金项目(40971234)
版权
Urban Travel Trajectory Extraction based on WiFi Probe Data
Received date: 2020-12-22
Request revised date: 2021-02-18
Online published: 2022-01-25
Supported by
National Natural Science Foundation of China, No(41561085)
National Natural Science Foundation of China, No(40971234)
Copyright
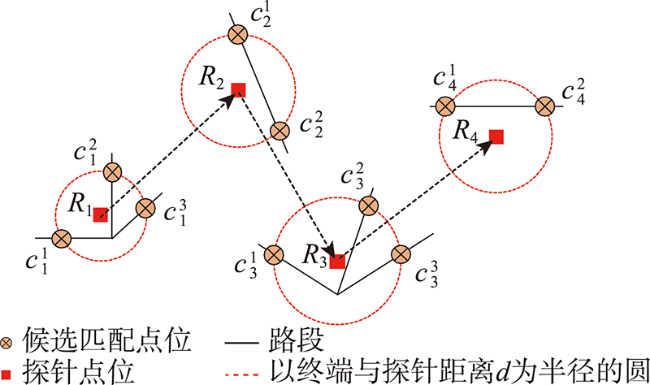
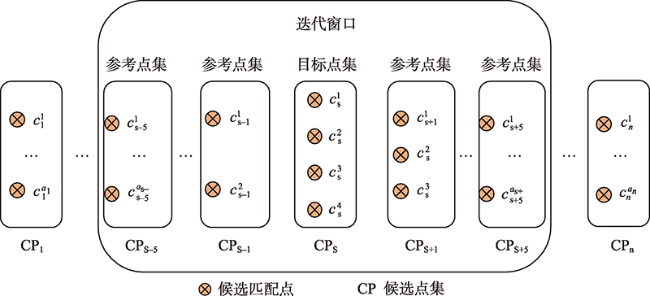
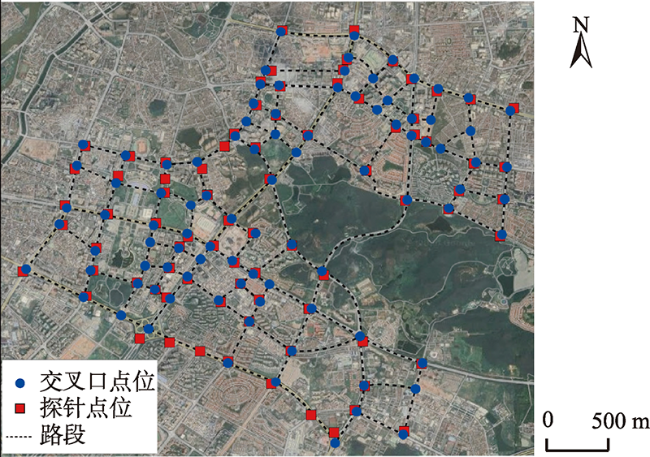
为了更便捷地提取城市居民的出行轨迹,从而分析个体的日常空间行为,进而为城市管理的各项措施决策提供数据支撑,本文提出基于WiFi探针数据的城市出行轨迹提取方法,主要解决WiFi探针数据的路网匹配及丢失轨迹重构问题。首先,通过对终端MAC码和时间戳进行多列排序后提取出轨迹记录序列,利用信号强度RSSI值为每条记录提取坐落在路网上的候选点集。其次,设计基于局部评价的算法,对于每一个候选点,利用其前后相邻的几条记录提取的候选点集与其之间的时空关系,先后对其进行时间一致性评价和空间一致性评价,再结合以时间反比动态构建的权函数,得到最终评分;然后将每个候选点集中评分最高的点作为最佳匹配点,至此完成轨迹记录的路网匹配。最后,先采用基于深度优先的路径搜索算法搜索出丢失轨迹上下点之间的所有可行路径,再基于TOPSIS法决策出最优的重构路径。本文以东莞市市中心区域收集的WiFi探针数据为实验数据进行测试,平均每日可提取6万多条轨迹,与其中获取的GPS数据相比较验证了方法的可行性,为城市出行轨迹挖掘提供了新的解决方案。
廖嘉欣 , 吴启用 , 兰小机 , 张红庆 . 基于WiFi探针数据的城市出行轨迹提取[J]. 地球信息科学学报, 2021 , 23(11) : 1946 -1955 . DOI: 10.12082/dqxxkx.2021.200777
In order to extract the travel trajectory of urban residents more conveniently, analyze the daily spatial behavior of individuals, and provide data support for the decision-making of urban management measures, this paper proposes an urban travel trajectory extraction method based on WiFi probe data, which mainly solves the problem of map matching and lost trajectory reconstruction of WiFi probe data. First, extract the track record sequence by sorting the terminal MAC code and timestamp in multiple columns, and use the RSSI value to extract the candidate point set located on the road network for each record. Secondly, an algorithm based on local evaluation is designed: for each candidate point, the spatio-temporal relationship between the candidate point set extracted from the adjacent records is used to evaluate its temporal consistency and spatial consistency, and then the final score is obtained by combining with the weight function dynamically constructed in inverse time ratio, then the highest score point in each candidate point set is selected as the best matching point. Finally, a depth-first-based path search algorithm is used to search for all feasible paths between the upper and lower points of the lost trajectory, and then the optimal reconstruction path is determined based on the TOPSIS method. In this paper, the WiFi probe data collected in the central area of Dongguan City is used as the experimental data to test, and more than 60 000 tracks can be extracted every day on average. Compared with the GPS data, the feasibility of the method is verified, which provides a new solution for urban travel trajectory mining.
表1 WiFi探针数据中的问题Tab. 1 The problem with WiFi probe data |
| 问题 | 描述 | 特征/例子 |
|---|---|---|
| 数据错误 | 信号源自身故障或环境干扰导致的终端MAC、时间、RSSI值错乱 | 终端MAC全为“0”或全为“F”时间属性缺失或记录错误RSSI为“-1”或小于-100 |
| MAC随机跳变 | 部分苹果和华为的设备存在MAC码随机跳变情况 | MAC码仅出现一次 |
| “乒乓效应” | 数据重复 | 终端处于2个或多个探针之间时,短时间内被重复检测到 |
| 固定设备干扰 | 不构成轨迹的设备如路由器、闲置的笔记本、手机平板等 | 长时间仅被个别探针重复检测到 |
表2 清洗之后的数据记录样例Tab. 2 The sample data records after cleaning |
| 探针的MAC地址 | 终端的MAC地址 | 时间戳 | 信号强度 |
|---|---|---|---|
| 00117F1B93CC | BCE******7E0 | 2020-07-09 09:20:50 | -85 |
| 00117F14C3D4 | BCE******7E0 | 2020-07-09 09:22:45 | -80 |
| 00117F1B9584 | BCE******7E0 | 2020-07-09 09:30:35 | -76 |
| …… | …… | …… | …… |
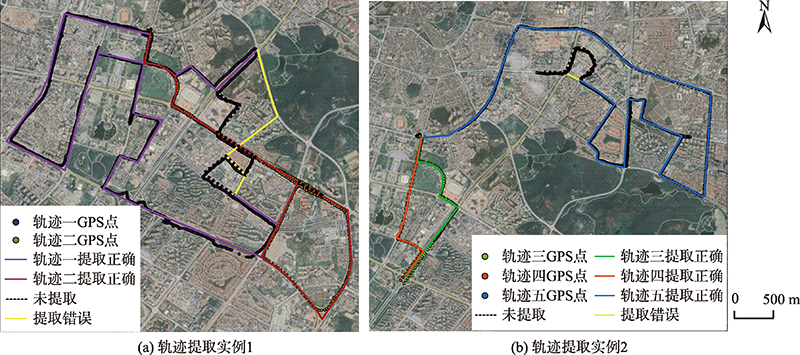
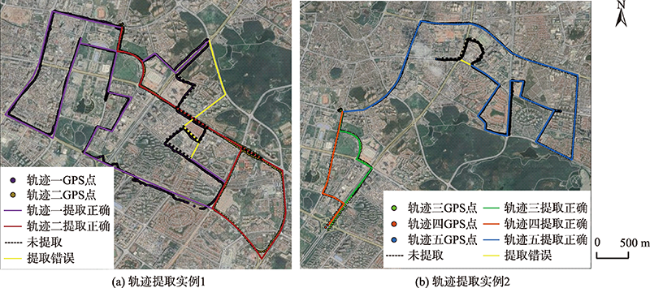
表3 轨迹提取实例结果统计Tab. 3 Statistics of trajectory extraction instance results (m) |
| 轨迹 | 实际匹配长度 | 提取长度 | 提取正确 | 提取错误 | 未提取 |
|---|---|---|---|---|---|
| 一号轨迹 | 17 750 | 16 596 | 14 177 | 2419 | 3573 |
| 二号轨迹 | 11 324 | 10 727 | 10 727 | 0 | 597 |
| 三号轨迹 | 2634 | 2634 | 2634 | 0 | 0 |
| 四号轨迹 | 2940 | 2940 | 2940 | 0 | 0 |
| 五号轨迹 | 15 217 | 13 663 | 13 407 | 256 | 1810 |
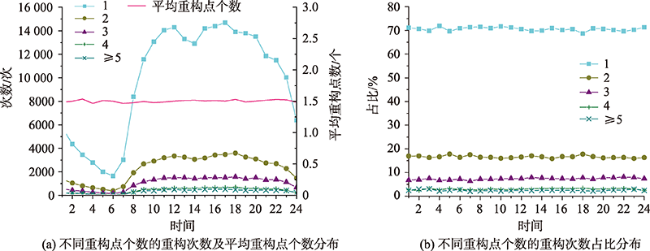
表4 轨迹重构整体情况Tab. 4 The overall situation of trajectory reconstruction |
| 重构点个数 | 重构次数/次 | 占比/% |
|---|---|---|
| 1 | 234 826 | 70.50 |
| 2 | 55 073 | 16.53 |
| 3 | 24 915 | 7.48 |
| 4 | 10 083 | 3.03 |
| ≥5 | 8184 | 2.46 |
| [1] |
刘瑜, 肖昱, 高松, 等. 基于位置感知设备的人类移动研究综述[J]. 地理与地理信息科学, 2011, 27(4):8-13,31,2.
[
|
| [2] |
付鑫, 孙茂棚, 孙皓. 基于GPS数据的出租车通勤识别及时空特征分析[J]. 中国公路学报, 2017, 30(7):134-143.
[
|
| [3] |
|
| [4] |
|
| [5] |
钟炜菁, 王德, 谢栋灿, 等. 上海市人口分布与空间活动的动态特征研究——基于手机信令数据的探索[J]. 地理研究, 2017, 36(5):972-984.
[
|
| [6] |
秦萧, 甄峰, 熊丽芳, 等. 大数据时代城市时空间行为研究方法[J]. 地理科学进展, 2013, 32(9):1352-1361.
[
|
| [7] |
方家, 王德, 谢栋灿, 等. 上海顾村公园樱花节大客流特征及预警研究——基于手机信令数据的探索[J]. 城市规划, 2016, 40(6):43-51.
[
|
| [8] |
周涛, 赵必成, 俞博. 基于CRISP-DM的交通大数据分析方法及实践——以重庆市手机信令数据和RFID数据为例[J]. 城市交通, 2017, 15(5):42-51.
[
|
| [9] |
蒋寅, 郑海星, 于士元, 等. 天津市职住空间分布与轨道交通网络耦合关系——基于手机信令数据分析[J]. 城市交通, 2018, 16(6):26-35.
[
|
| [10] |
陆振波, 龙振, 余启航. 基于手机信令数据的昆山市职住分布与通勤特征分析[J]. 现代城市研究, 2019, 34(3):50-55.
[
|
| [11] |
李萍. 基于校园WiFi探测的用户移动性研究[D]. 北京:北京邮电大学, 2016.
[
|
| [12] |
陈菁菁, 江志彬. 基于WiFi嗅探数据的地铁网络客流分析技术[J]. 城市轨道交通研究, 2018, 21(5):153-157.
[
|
| [13] |
李思杰, 朱炜, 黄兆东. 基于WIFI数据的城市轨道交通乘客出行时空轨迹推定[J]. 华东交通大学学报, 2017, 34(2):85-92.
[
|
| [14] |
徐洋, 孙建忠, 黄磊, 等. 基于WiFi定位的区域人群轨迹模型[J]. 山东大学学报(理学版), 2019, 54(5):8-20.
[
|
| [15] |
朱晨迪, 贾俊, 张斌, 等. 融合地图信息与 WiFi地标的室内粒子滤波定位算法[J]. 山东科技大学学报(自然科学版), 2020, 39(1):91-99.
[
|
| [16] |
高文超, 李国良, 塔娜. 路网匹配算法综述[J]. 软件学报, 2018, 29(2):225-250.
[
|
| [17] |
|
| [18] |
郑诗晨, 盛业华, 吕海洋. 基于粒子滤波的行车轨迹路网匹配方法[J]. 地球信息科学学报, 2020, 22(11):2109-2117.
[
|
| [19] |
|
| [20] |
阮树斌, 王福建, 马东方, 等. 基于车牌识别数据的机动车出行轨迹提取算法[J]. 浙江大学学报(工学版), 2018, 52(5):836-844.
[
|
| [21] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}